

ESO
1r, 2n, 3r
Descripció de l’activitat
Atenció! Us acaben de comunicar que hi ha hagut un accident a l’interior d’un túnel i pot haver-hi gent atrapada. La il·luminació del túnel no funciona i podria haver-hi acumulació de gasos o substàncies perilloses. Podreu enviar un robot de reconeixement que localitzi on estan les persones atrapades, us avisi amb un senyal acústic quan en trobi alguna i retorni fins a l’entrada del túnel? Sereu capaços de controlar els seus moviments només amb els gestos d’una mà?
Material necessari
- Placa micro:bit
- Robot Smart Cutebot
Orientacions pedagògiques
Podeu aprofitar per introduir el tema de la IA: què és, quines oportunitats ofereix, quins avantatges, inconvenients o riscos pot tenir, etc. Si voleu fer que podeu simular el túnel, disposant elements lateralment que representin les parets del túnel, per fer que el vehicle hagi de circular pel mig (podeu utilitzar llibres, caixes o elements similars).
Elements de programació
- Seqüències bàsiques
- Esdeveniments
- Bucles
- Condicionals
- Operadors
- Programació per blocs textuals (verticals)
Eix | Àrea | Matèria
SEC – Tecnologia i Digitalització
Competències específiques
CE05 – Desenvolupar algorismes i aplicacions informàtiques en diferents entorns, tot aplicant els principis del pensament computacional i incorporant les tecnologies emergents, per resoldre problemes concrets, automatitzar processos i aplicar-los en sistemes de control o robòtica.
Sabers
Iniciació a la robòtica. Muntatge i control programat de robots o dispositius programables de manera física o mitjançant simuladors.
![]()
![]()
![]()
![]()
1. Començareu entrenant el sistema d’intel·ligència artificial micro:bit CreateAI perquè reconegui els gestos que fem amb la micro:bit a partir de les dades de moviment de l’acceleròmetre. Micro:bit CreateAI és una eina gratuïta basada que facilita explorar la IA mitjançant el moviment i l’aprenentatge automàtic (ML).

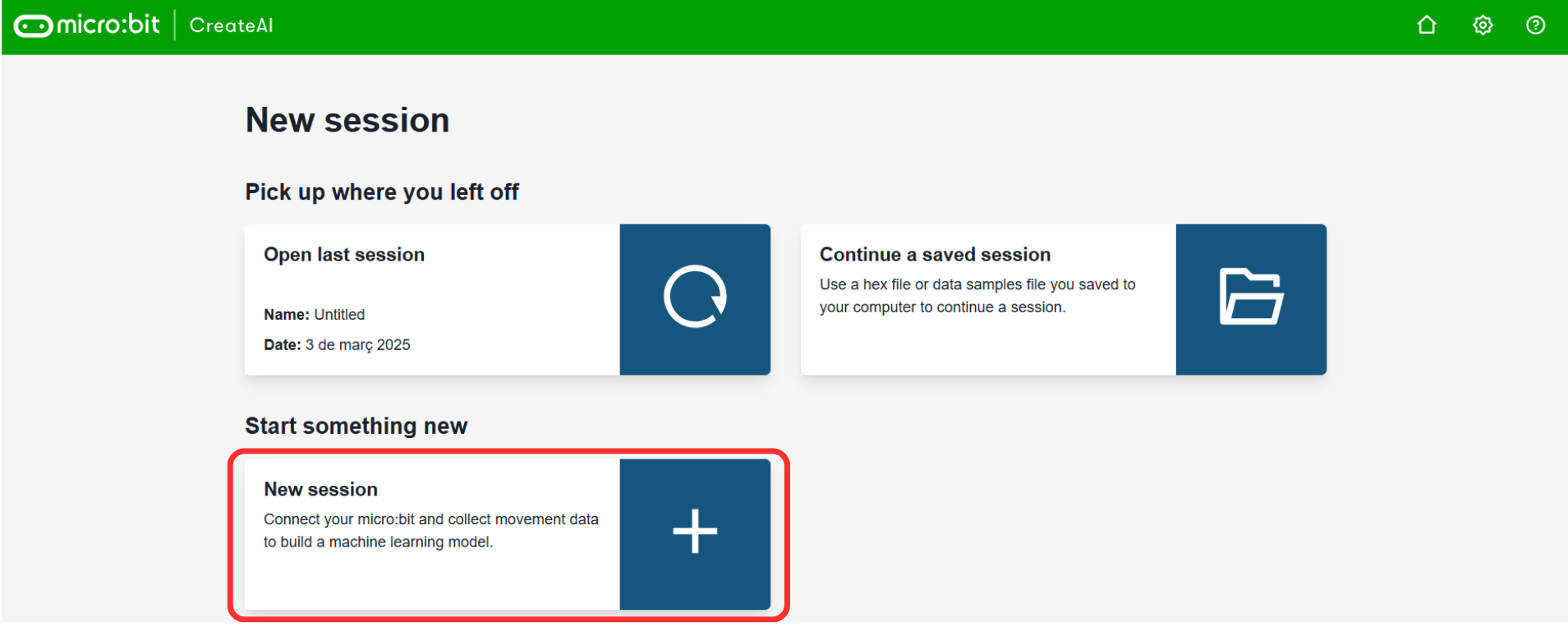
2. Entreu a micro:bit CreateAI i feu clic a “New session”:
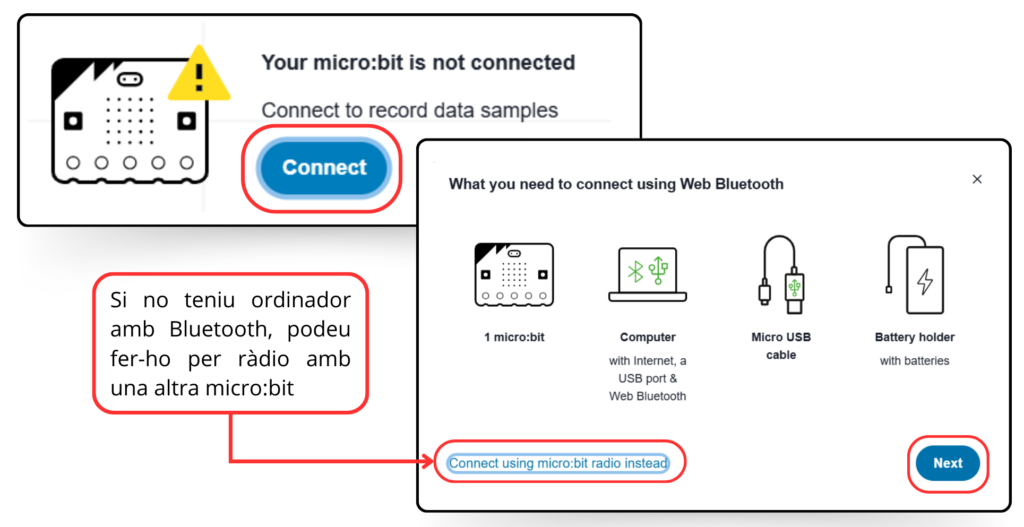
3. Connecteu la placa, fent clic al botó “Connect” i seguiu els passos que us indiquen. Aquesta placa és la que farà de comandament del robot smart cutebot (placa A). Per fer que funcioni com a comandament, enviareu una cadena per ràdio cap a la micro:bit que duu el robot smart cutebot (placa B). Per tant, haureu de programar les dues plaques per separat:
4. Un cop teniu la placa connectada, es descarregarà un fixter a la placa i us sortirà el missatge que veieu a continuació:
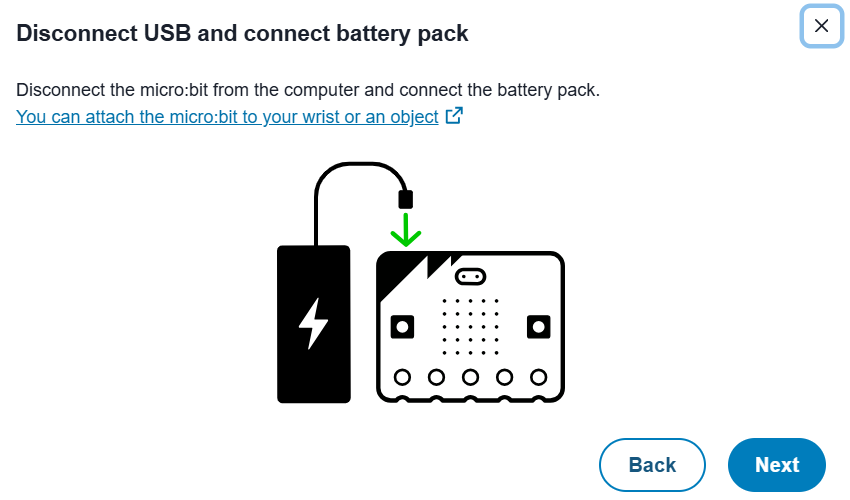
Només cal desconnectar-la si la voleu utilitzar amb una bateria externa. A continuació, us sortirà una finestra amb un patró dibuixat a la matriu de leds:
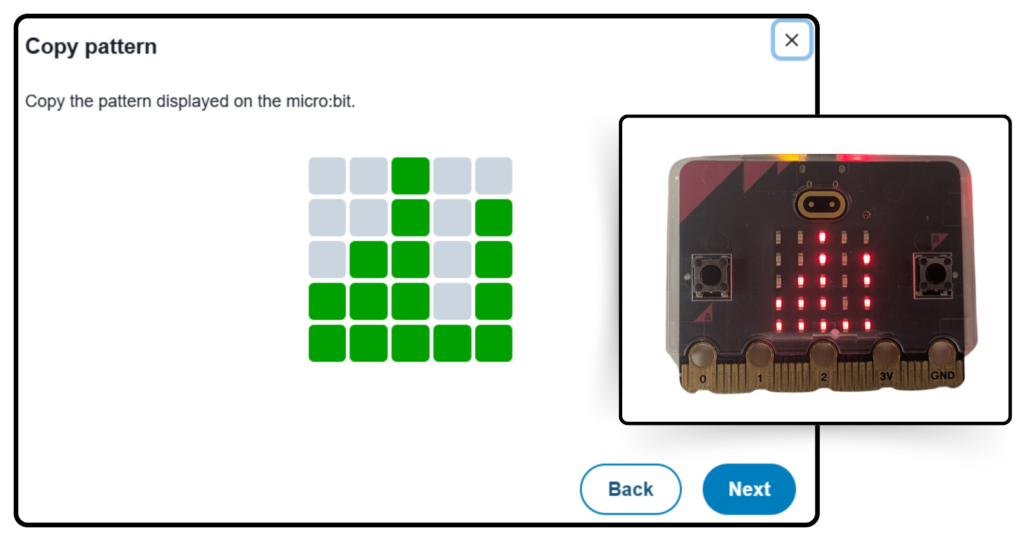
Si no coincideix amb el que veieu a la placa, reproduïu a la matriu de l’ordinador el mateix patró que teniu a la placa.
5. Seguiu endavant segons les indicacions que us donen. Us sortirà un missatge informant-vos que la placa s’ha connectat per Web Bluetooth i us apareixerà l’entorn per poder començar a enregistrar les accions:
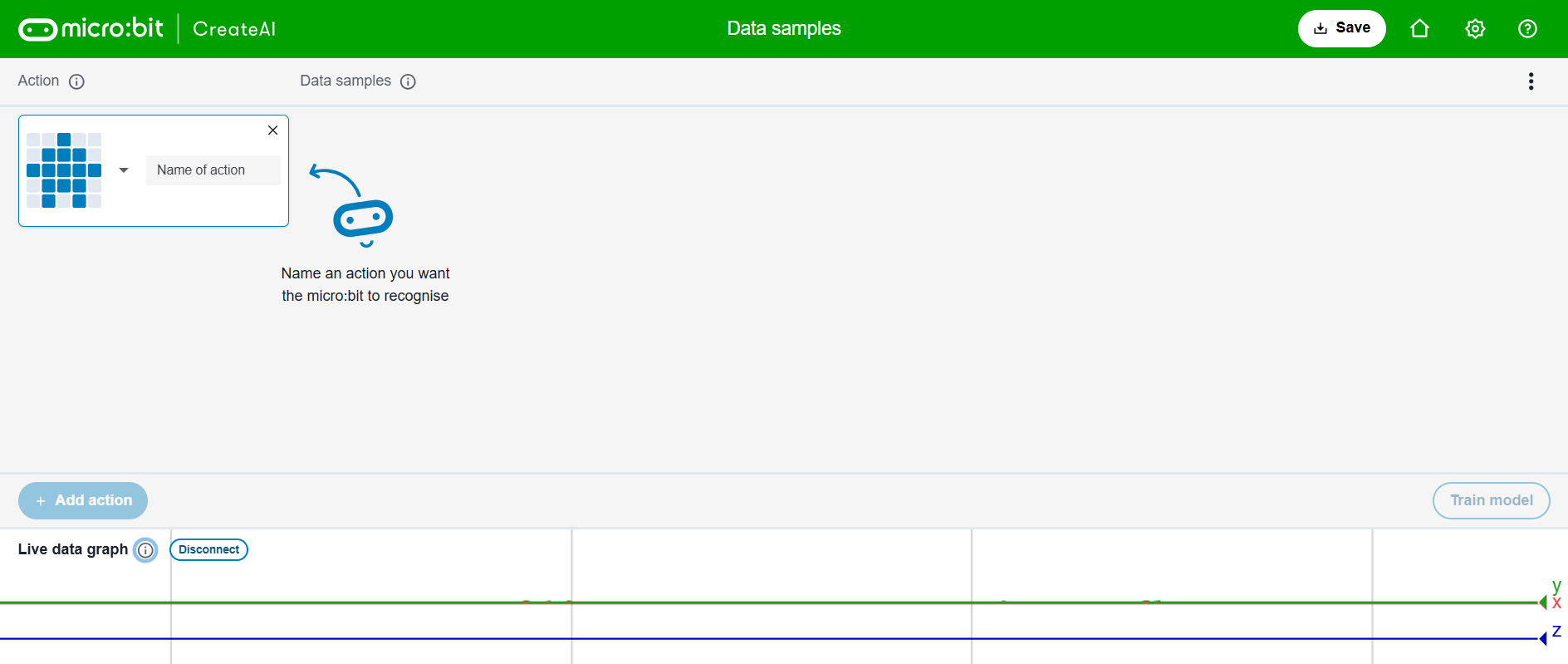
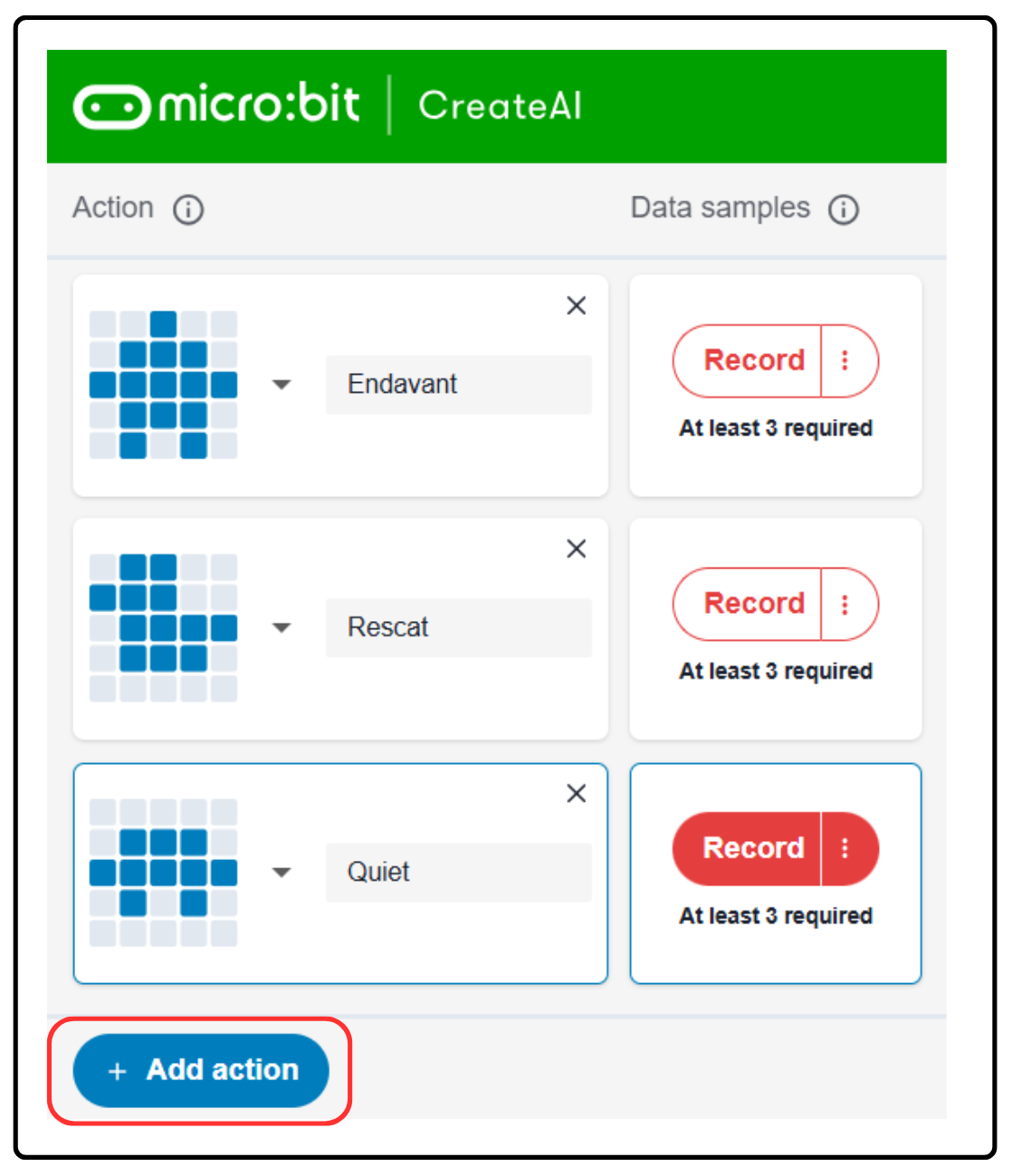
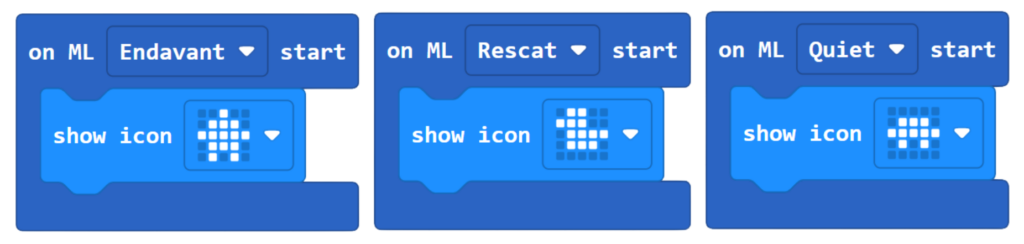
6. Comenceu a enregistrar les accions. En aquest cas, enregistrarem tres accions diferents: “Endavant”, “Rescat” i “Quiet”:
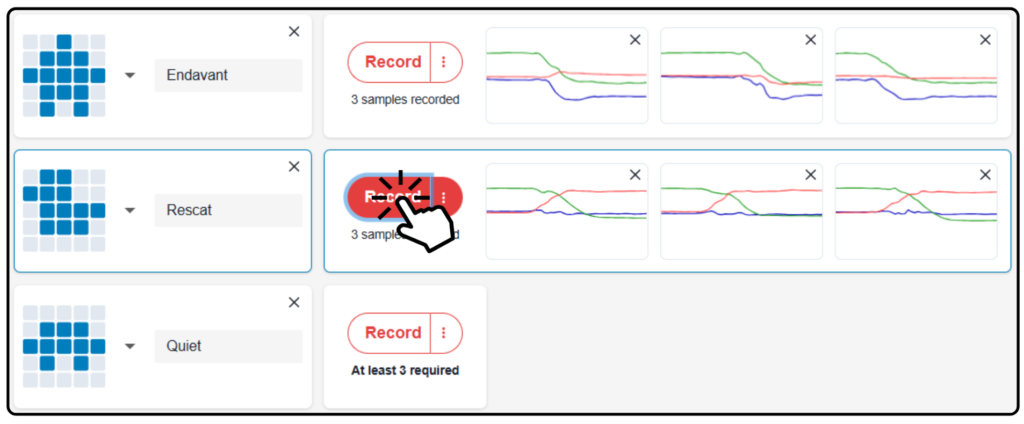
7. A continuació, enregistreu el moviment per a cadascuna de les accions, fent clic sobre el botó “Record”. Us demanarà que feu, com a mínim, tres enregistraments per a cada acció:
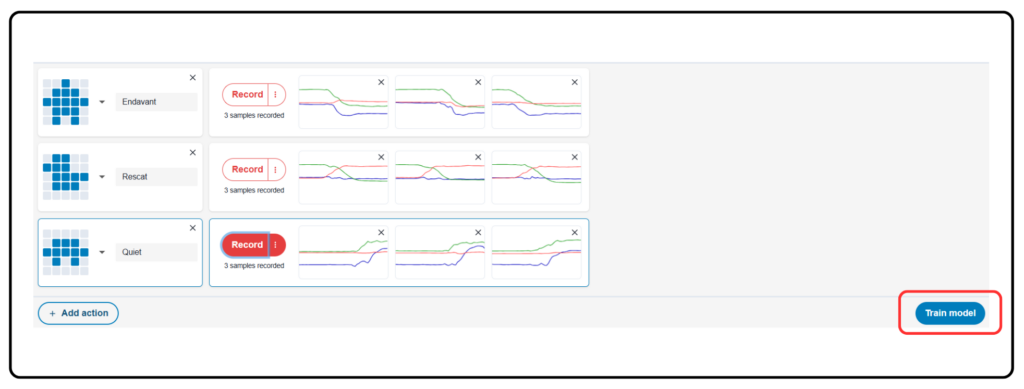
8. Quan tingueu totes les accions enregistrades, feu clic al botó “Train model”:
9. Un cop el model està entrenat, podeu fer comprovacions per veure si identifica les accions que feu amb la placa de manera correcta. Quan feu un moviment amb la placa, es destacarà de color verd l’acció que el sistema està identificant, amb el percentatge de semblança. Si tot funciona bé, podeu passar a l’entorn de programació makecode, fent clic a “Edit in MakeCode”:

10. A MakeCode trobareu una categoria nova anomenada “Machine Learning”:

També hi trobareu els tres blocs que acabeu de configurar i podreu utilitzar-los per programar. Si voleu, podeu canviar la imatge de la icona que ha de mostrar la matriu de leds, o bé suprimir el bloc per no mostrar cap icona:
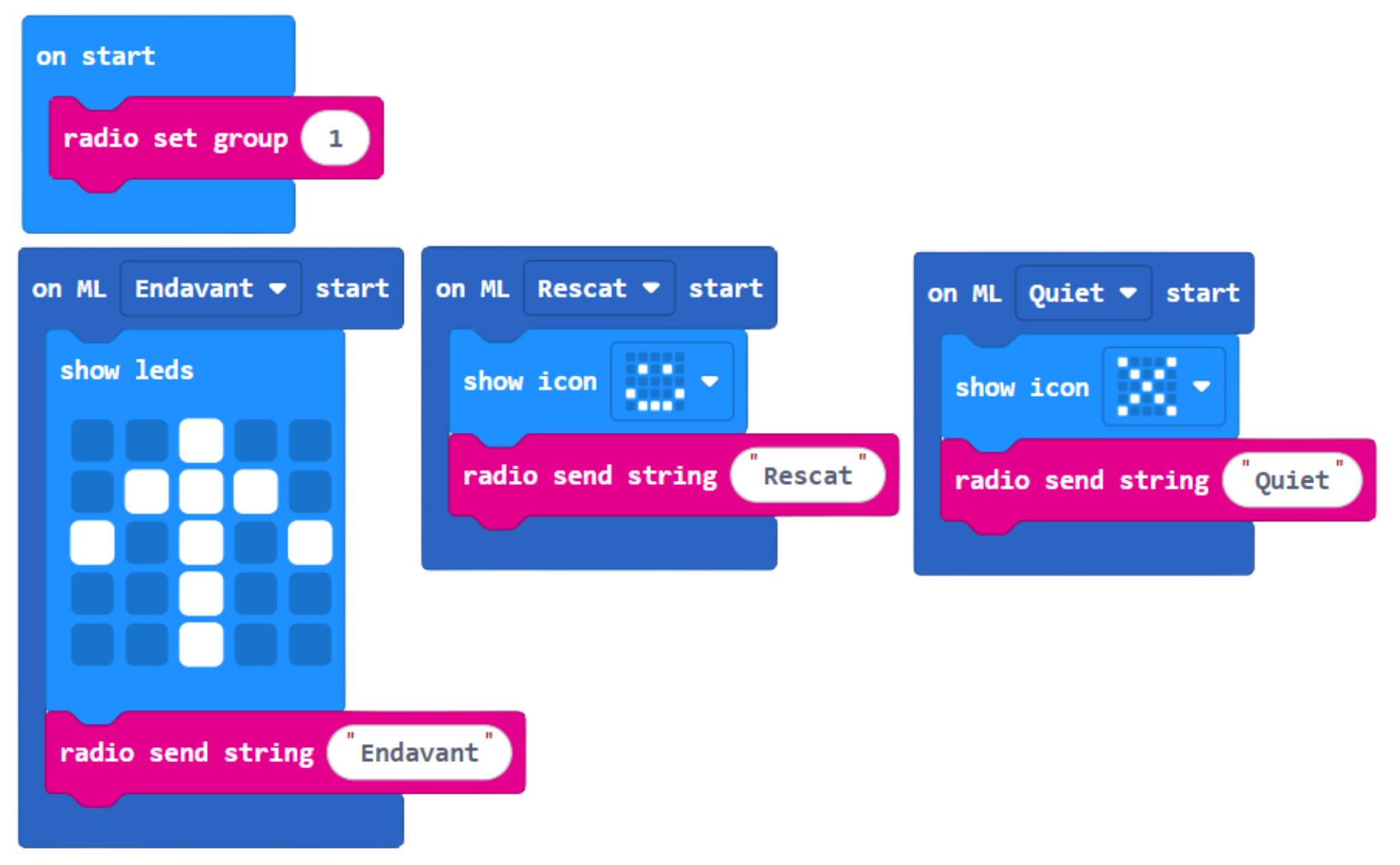
11. Programeu l’enviament per ràdio de les tres accions que heu configurat. De la categoria “Basic”, trieu el bloc “on start” i de la categoria “Radio”, poseu-hi el bloc “radio set group 1”:

12. De la categoria “Radio”, situeu un bloc “radio send string …” a cadascun dels tres blocs d’acció que heu creat amb micro:bit CreateAI i poseu-hi el text que correspongui (“Endavant”, “Rescat” i “Quiet”):
13. A continuació, carregueu l’extensió per poder treballar amb el Cutebot. Aneu a l’apartat “+ Extensions” i al cercador que s’obre escriviu “Cutebot” i trieu “Cutebot” o “Cutebot pro”, en funció del robot que tingueu
Us apareixerà una categoria nova de blocs amb el nom “Cutebot”
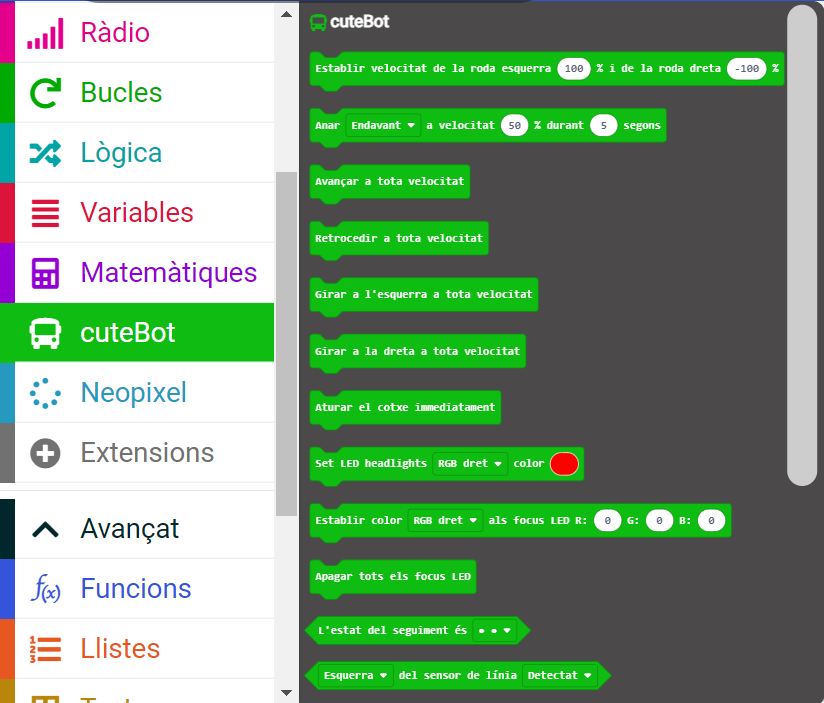
Amb aquests blocs configurareu els moviments del robot, condicionats a la cadena que la placa B rebi per ràdio des de la placa A.
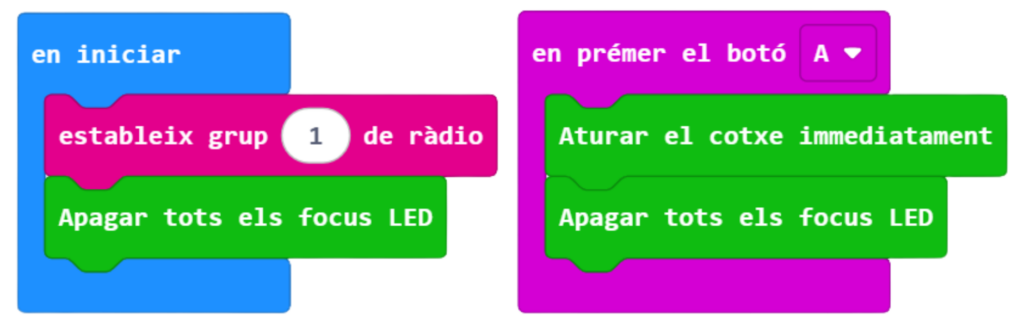
14. Per configurar el moviment del robot, des dels blocs de moviment de Cutebot, cal que feu el següent:
- En iniciar, el robot ha de tenir els leds apagats i heu d’establir el grup de ràdio a “1”.
- Programeu el botó A per aturar immediatament el robot i apagar els leds, en cas d’emergència.
- Pel que fa a la programació de la missió principal, feu que en rebre per ràdio des de la placa A la cadena “Endavant”, el robot encengui els leds de color verd i comenci a avançar a baixa velocitat (per exemple a un 25% de la velocitat màxima).
- El robot haurà d’engegar els leds de color verd i començar a avançar en línia recta fins que detecti un obstacle a una distància determinada (a l’exemple són 5 cm).
- Quan detecti un obstacle, s’ha d’aturar i canviar els leds a color vermell.
- A la fase de “Rescat”, el robot ha de canviar els leds a color taronja i començar a retrocedir a baixa velocitat; la placa B rebrà la cadena “Rescat” des de la placa A per iniciar aquesta operació.
- El vehicle seguirà retrocedint fins que rebi la cadena “Quiet” des de la placa A.
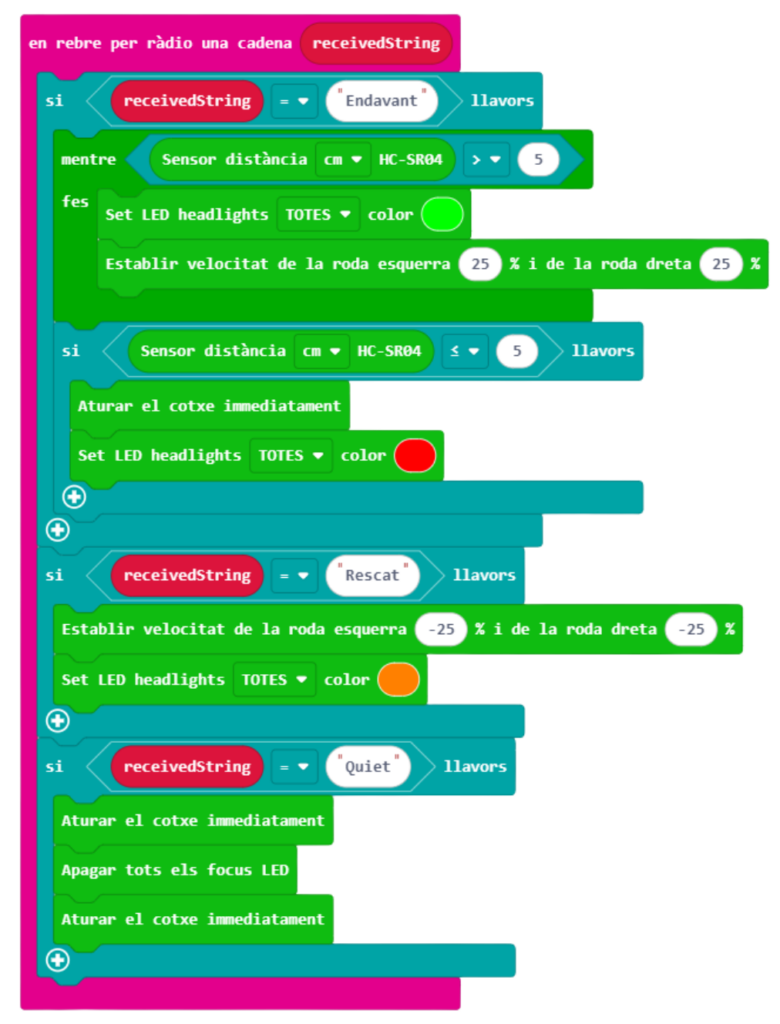
15. Tota aquesta programació s’ha de transferir a la placa B, que és la que va amb el cutebot.