
PRI
Segon Cicle (3r-4t)
Descripció de l’activitat
El Robot Edison es pot programar perquè segueixi un senyal de llum, fent-lo avançar i girar en funció de la llum que rebi. En aquesta activitat es proposa la construcció d’un escenari urbà, on l’alumnat col·locarà tot un seguit de senyals de trànsit, simulant un circuit de pràctiques per a l’educació viària. Un cop programat, els alumnes hauran de fer pràctiques de circulació “conduint” el robot pels carrers de la ciutat, interpretant i respectant els senyals de trànsit que es trobin.
Material necessari
- Robot Edison V3
- Senyals de trànsit per imprimir
Orientacions pedagògiques
Per poder fer l’activitat, es recomana la construcció a l’aula d’un escenari urbà perquè el robot pugui circular (pot ser una cartolina, o es pot fer una construcció més elaborada, en funció del temps de què es disposi, aprofitar per representar el mateix municipi, alguna ciutat propera o d’interès per als alumnes). Els alumnes, per grups, col·loquen els senyals de trànsit per crear cada vegada, un escenari diferent, i plantejar un repte de conducció a un altre grup d’alumnes. Finalment, cada grup configura un “escenari de conducció”, que hauran de superar els altres grups conduint el robot Edison per tal que compleixi les normes de circulació. Els senyals es poden fer dibuixar als alumnes, o podem donar-les impreses, i fer que els alumnes les situïn sobre el circuit creat. Per crear els senyals es poden fer servir materials reciclats (tubs de paper de vàter, pals de gelat, escuradents, taps de plàstic o suro per les bases, etc.)
Enllaç a l’arxiu de les imatges amb senyals d’exemple per imprimir.
Elements de programació
Eix | Àrea | Matèria
PRI – Coneixement del Medi Natural, Social i Cultural | | PRI- Educació en Valors Civics i Ètics
Competències específiques
CE03 – Resoldre problemes i reptes generant cooperativament un producte creatiu i innovador a partir de projectes interdisciplinaris, utilitzant diferents formes de raonament, com el pensament de disseny i el pensament computacional, per respondre a necessitats concretes. | | Educació en Valors Cívics i Ètics CE02 – Actuar i interactuar atenent a normes i valors cívics i ètics, reflexionant sobre la seva importància per a la vida individual i col·lectiva, per aplicar-los de manera efectiva i argumentada…
Sabers
Identificació de les normes de circulació, senyals i marques viàries, per afavorir una mobilitat segura com a vianants i usuaris dels mitjans de transport col·lectius o personals.
![]()
![]()
![]()
![]()
El robot Edison té dos sensors de llum (sensors analògics) que recullen les dades de la intensitat de la llum entre valors entre 0 (mínim) i 1023 (màxim). Aquests sensors estan situats en la part frontal dreta i esquerra del robot.
Programareu el robot amb un bloc condicional, que us ajudarà a executar una acció o una altra en funció de la llum que arribi al sensor dret o esquerre.
– Quan el robot rebi llum en la part esquerra girarà a l’esquerra, i si la rep per la dreta, girarà a la dreta.
– Per fer un gir a la dreta, haurem de moure més de pressa el motor de l’esquerra i més a poc a poc el motor de la dreta. Fixeu-vos que el motor que gira més lent és sempre el que actua d’eix de gir.
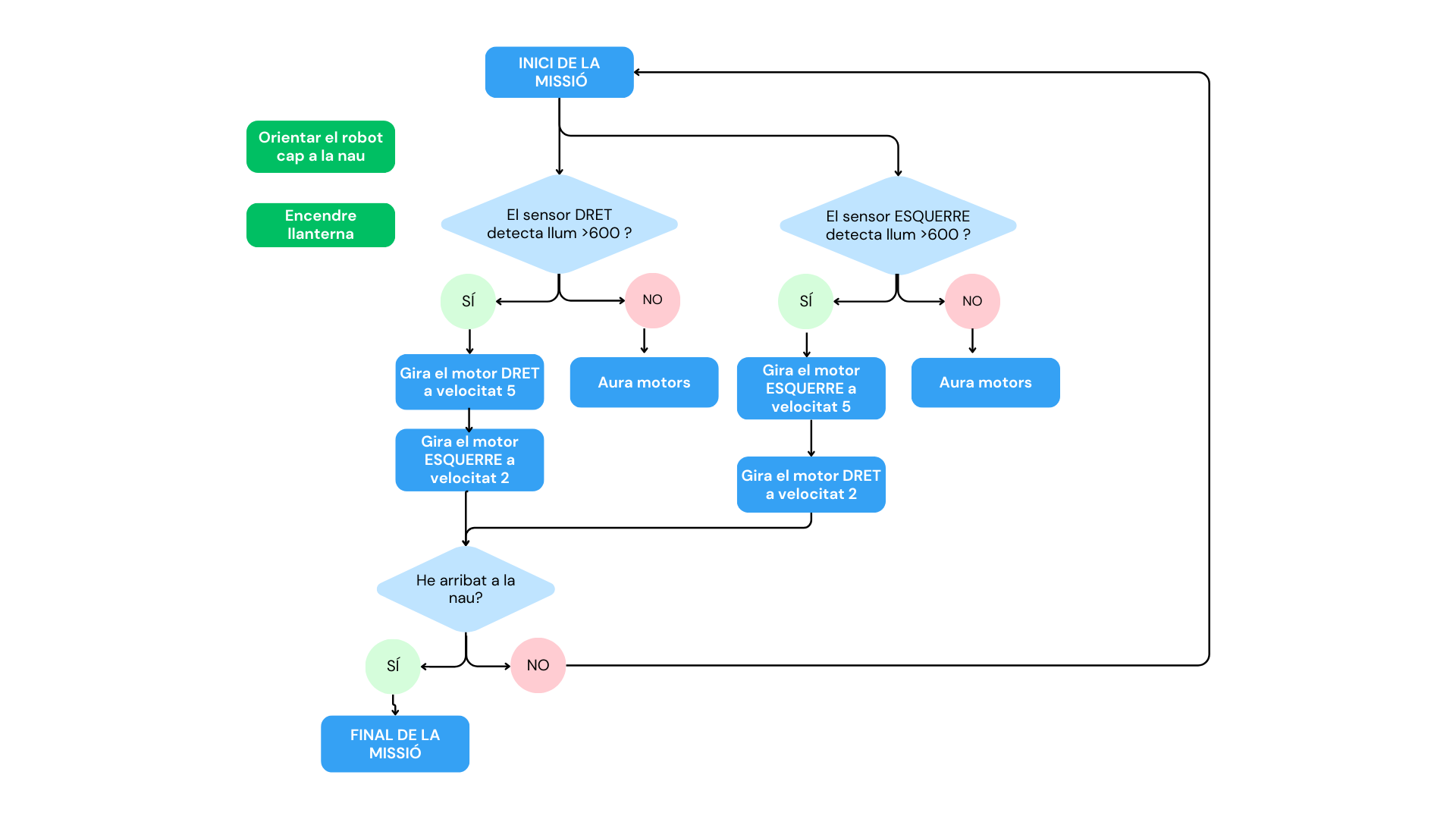
1. Programació dels condicionals. En la següent imatge es pot veure l’estructura de condicionals inicial
2. Establiment de les comparacions lògiques. Aneu a la categoria “operadors”, on trobareu blocs per fer comparacions i operacions matemàtiques. Aquests blocs us ajuden a comparar si un valor és major o menor que un altre. Per fer això, hem de fer servir el bloc condicional “If …. then …….. else” Aquest bloc integrarà una segona condició “If …. then …….. else”. Per entendre aquesta part, ajudarà molt fer un diagrama de flux amb l’alumnat, que ajudi a entendre totes les opcions que es poden donar.
3. Amb els condicionals heu programat els motors perquè girin cap a la dreta o l’esquerra. A continuació, haureu de programar que avanci cap endavant, això ho podeu fer amb el comparador “and” dels blocs d’operadors. Aquest comparador ens possibilita fer que es compleixin dues condicions: que els dos sensors rebin la mateixa llum per avançar en línia recta. En la imatge es pot veure el programa final, amb els diferents condicionals.4. A l’hora de provar el robot, tingueu en compte la llum que ja teniu a l’aula per fixar els valors (en l’exemple, hem fixat un valor de 400, però si hi ha molta llum a l’aula haurà de ser inferior). Perquè el sensor de llum pugui captar la llum de la llanterna, cal apropar-la molt fins al robot.