
ESO
1r, 2n, 3r
Descripció de l’activitat
En aquesta activitat construirem un robot-insecte, l’escara:bit! Aquest robot es desplaça fent servir dos servomotors.
Material necessari
- Cartó o cartolina mida A4
- Massilla adhesiva moldejable
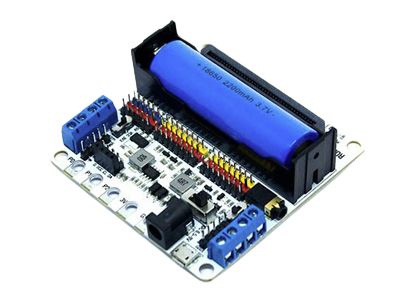
- Micro:bit i placa d’expansió amb bateria (Micro:shield o similar).
- Tisores
- 2 Servomotors
Orientacions pedagògiques
Podeu introduir o repassar què són els servomotors, ja que són un element clau per al funcionament d’aquest robot.
Feu grups de treball en funció de les plaques i shields que tingueu disponibles.
Elements de programació
Eix | Àrea | Matèria
SEC – Tecnologia i Digitalització
Competències específiques
CE03 – Aplicar de manera apropiada diferents tècniques i coneixements interdisciplinaris, tot utilitzant operadors, sistemes tecnològics i eines, seguint la planificació i el disseny sostenible previ per construir solucions tecnològiques que donin resposta a necessitats en diferents contextos.
Sabers
Iniciació a la robòtica. Muntatge i control programat de robots o dispositius programables de manera física o mitjançant simuladors.
![]()
![]()
![]()
![]()
En aquesta activitat es construeix un robot-insecte com el de la imatge:
1. Construcció de la base. Per construir la base, proposem fer servir una cartolina, que doblegarem per poder formar un quadrat, a partir d’un DIN A4. Caldrà doblegar-lo longitudinalment per la meitat, i després dividir en tres parts iguals. Es retalla una part, que farem servir per construir les potes, i les altres dues parts es tornen a doblegar per formar la base.
Enganxem les vores amb cinta adhesiva, i tenim la base feta. Caldrà fixar la shield a aquesta base (recomanem fer servir Bluetack)
2. Connexió dels servomotors. Com es veu a la imatge, els servomotors es connectaran als ports de la placa micro:shield específic per a servos; als pins S06 i S07 .
3. Construcció de les potes. Amb el cartó sobrant, retallem les potes de l’escara:bit. Per fer unes potes resistents, caldrà retallar 4 peces per cada pota i enganxar-les amb cinta adhesiva per donar rigidesa. Finalment, caldrà fixar les dues peces de connexió amb l’eix dels dos servomotors a les potes.
4. Programació dels servomotors. Obrim l’entorn makecode https://makecode.microbit.org/ Per programar els servomotors, s’ha d’afegir l’extensió “micro:shield” per fer-ho, cal anar a la categoria “extensions” i cercar l’extensió micro:shield. Un cop cliquem a sobre, ja la podem fer servir des del menú de categories
Caldrà fer servir el bloc “Servo S0 to angle ….” .
Caldrà deixar una pausa entre els dos moviments, en aquest cas hem posat 500 mil·lisegons. Cal dir que l’angle òptim que s’ha trobat per aquesta pràctica és 106º , però pot ser que calgui ajustar-lo en funció de cada construcció.
5. Per programar els servomotors. Farem sevir els polsadors de la placa mico:bit: polsador A (activa els servomotors) i polsador B (atura els servomotors)
La programació dels polsadors es fa amb els blocs de la categoria “entrada”
Com es pot veure a la imatge, cal definir una variable, que anomenarem “ON” que determina si s’ha premut el botó d’activació. Farem servir aquesta variable com un interruptor. D’aquesta manera, si el botó A es prem, la variable pren el valor 1. Quan premem el botó “B” en valdrà 0. Establim un condicional per fer que quan la variable en valgui 1, els motors s’engeguin i quan en valgui 0 es parin. En la categoria de lògica trobarem els blocs condicionals.
6. Es pot programar, per últim, que a la matriu de LED de la placa es dibuixi un símbol quan s’activi l’Escara:bit.
En aquest vídeo es pot veure tot el procés de muntatge del roboinsecte:
En aquest vídeo es pot veure com programar-lo: