
Guia ràpida
Com treballar amb servomotors
En aquesta guia ràpida teniu les instruccions per treballar amb servomotors com els que trobeu als conjunts de primària i de secundària bàsic.
Material necessari
- Placa Keyestudio UNO
- Servomotor (KS0194)
- Polsador (KS0029)
- Ordinador. Abans de començar a fer servir la placa ESP32 STEAMakers, cal comprovar que el nostre dispositiu tingui instal·lats els controladors necessaris. Trobareu tota la informació en aquesta fitxa.
1. Executeu el programa AB-Connector. Recordeu que cal que estigui en execució tota l’estona mentre treballeu amb ArduinoBlocks.
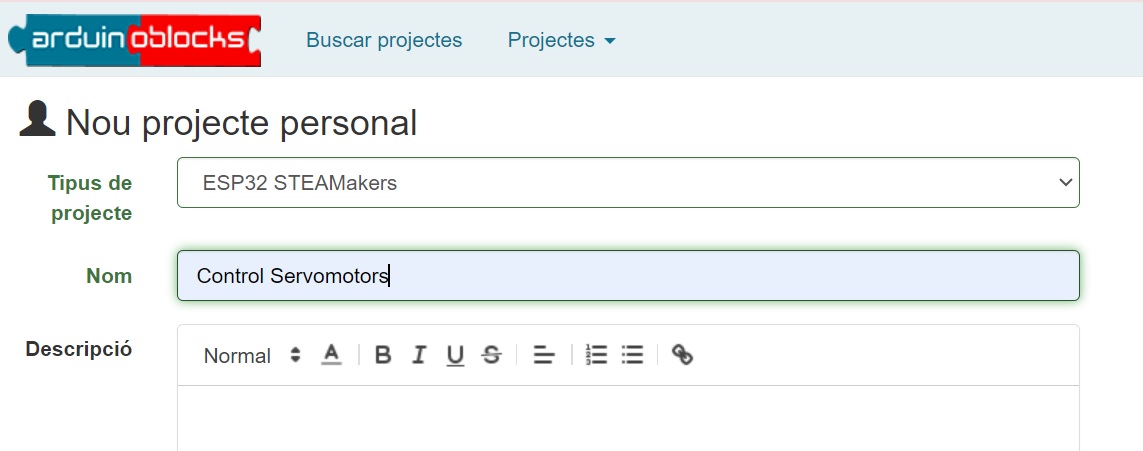
2. Aneu a ArduinoBlocks, inicieu sessió i comenceu un nou projecte del tipus “ESP32 STEAMakers”
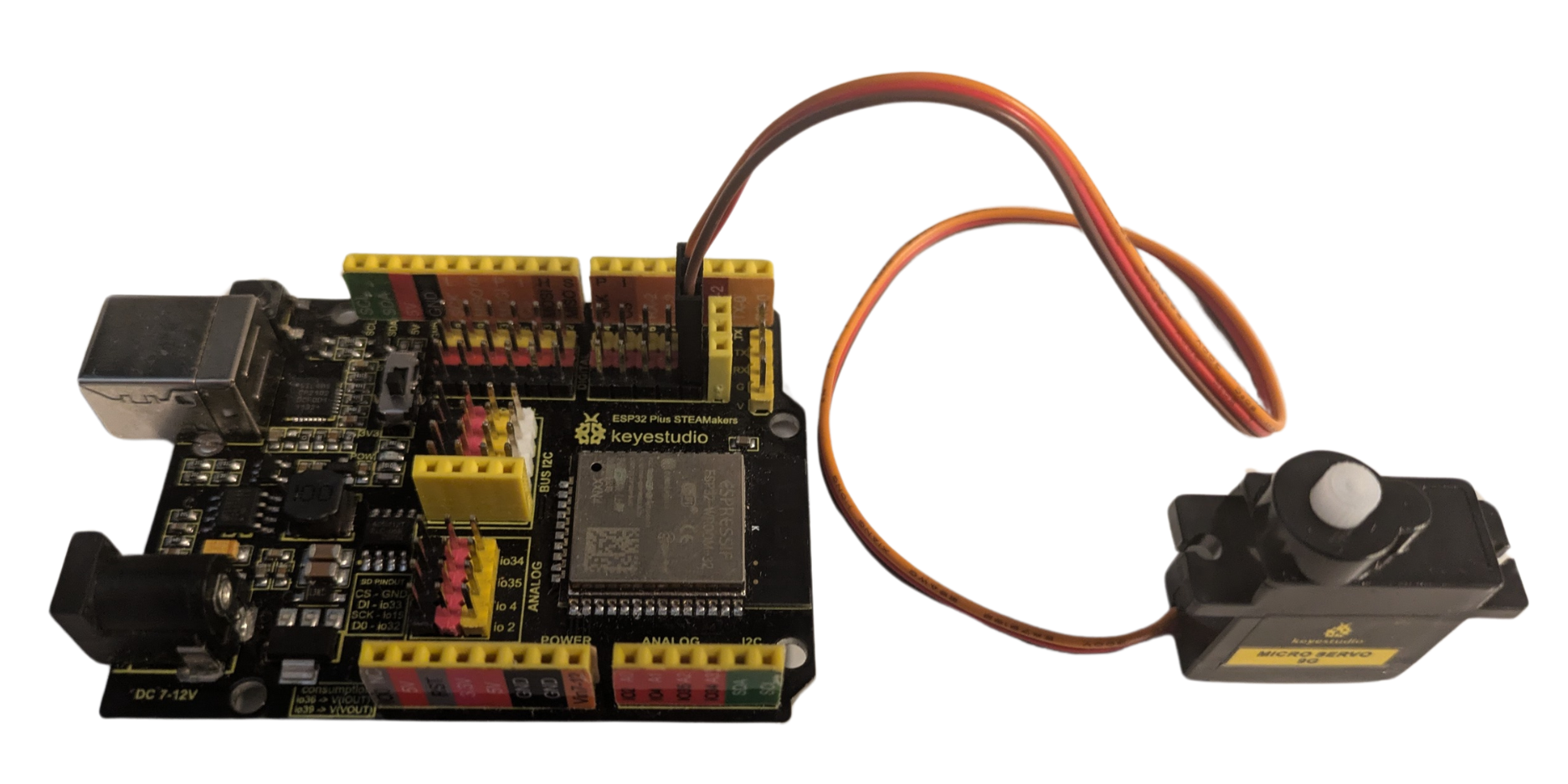
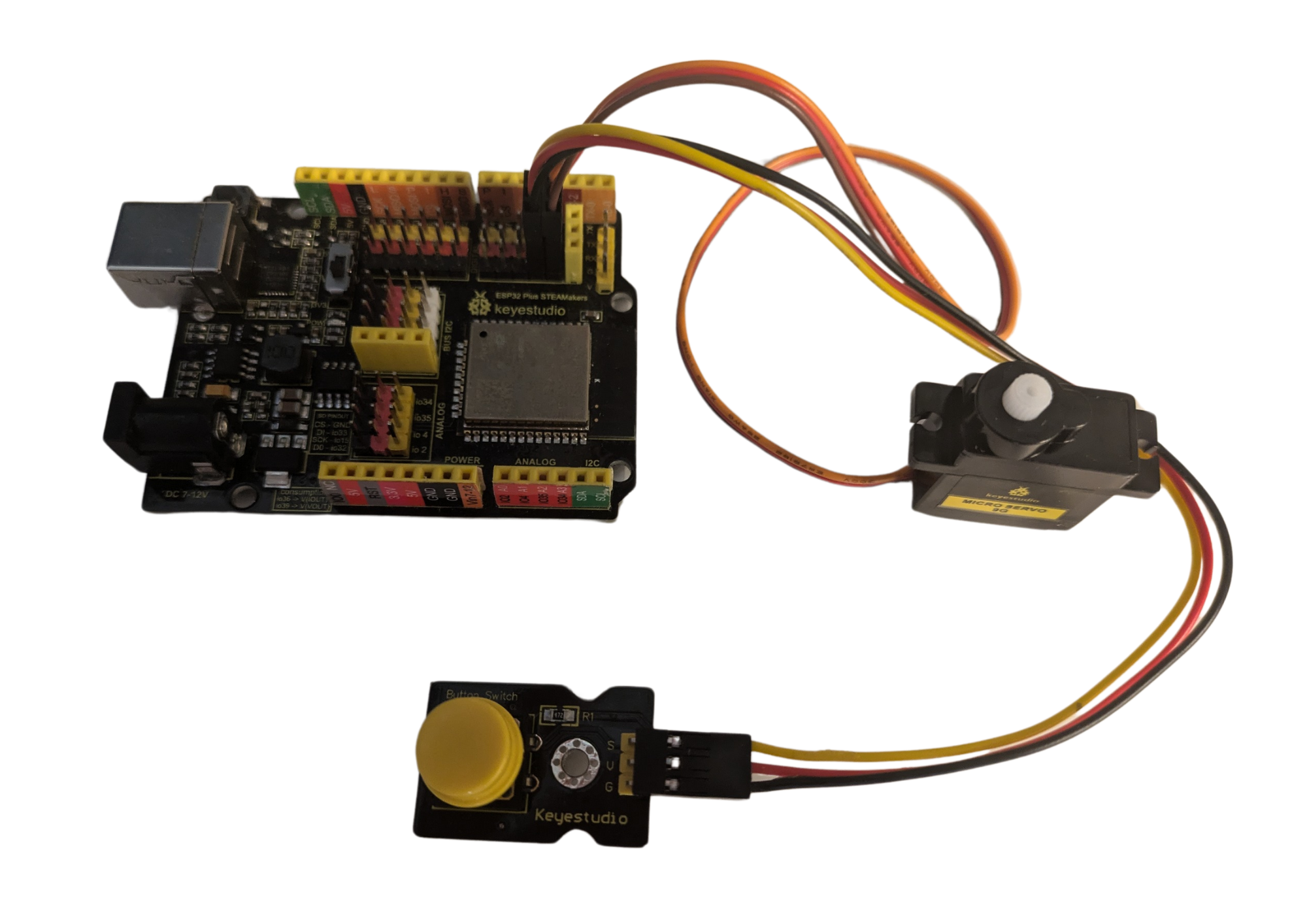
3. Connecteu el servomotor a algun dels pins digital de la placa (a l’exemple utilitzarem el pin D3), tenint en compte que el cable marró del servomotor correspon a la G -terra- (color negre de la placa), el cable vermell del servomotor correspon a la V -voltatge- (color vermell de la placa) i el cable taronja del servomotor correspon a l’S -senyal- (color groc de la placa)
4. A continuació, de la categoria “Motors / Servo” seleccioneu el bloc “Servo” i poseu-lo al bloc “Bucle”. Seleccioneu el pin on teniu connectat el servomotor i indiqueu l’angle de gir i si voleu que tingui algun retard abans de fer-lo.

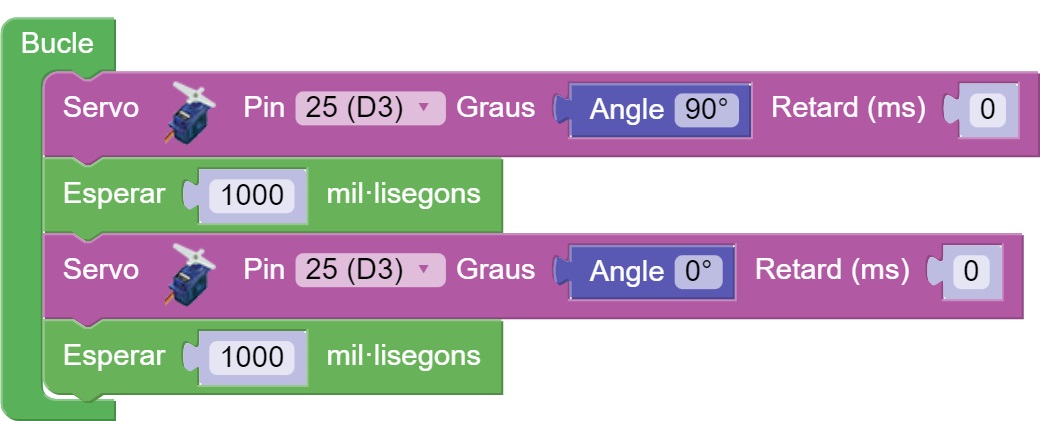
5. En aquest exemple, per veure el servomotor en funcionament, fareu que el servomotor giri un angle de 90º, passat un segon tornarà a la seva posició inicial (0º) i passat un altre segon tornarà a girar 90º. Això ho farà de manera contínua: A dins del bloc “Bucle” col·loqueu el bloc servo amb un gir de 90º. A continuació, de la categoria “Temps”, poseu un bloc d’espera de 1000 mil·lisegons, seguit d’un bloc de gir del servo a 0º i d’una nova espera d’un segon, tal com es mostra a la imatge:
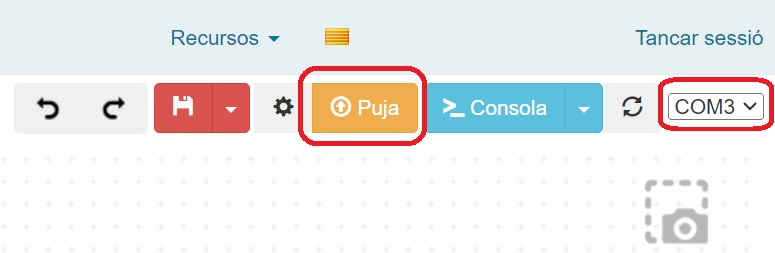
6. Feu clic al botó puja situat a dalt a la dreta.
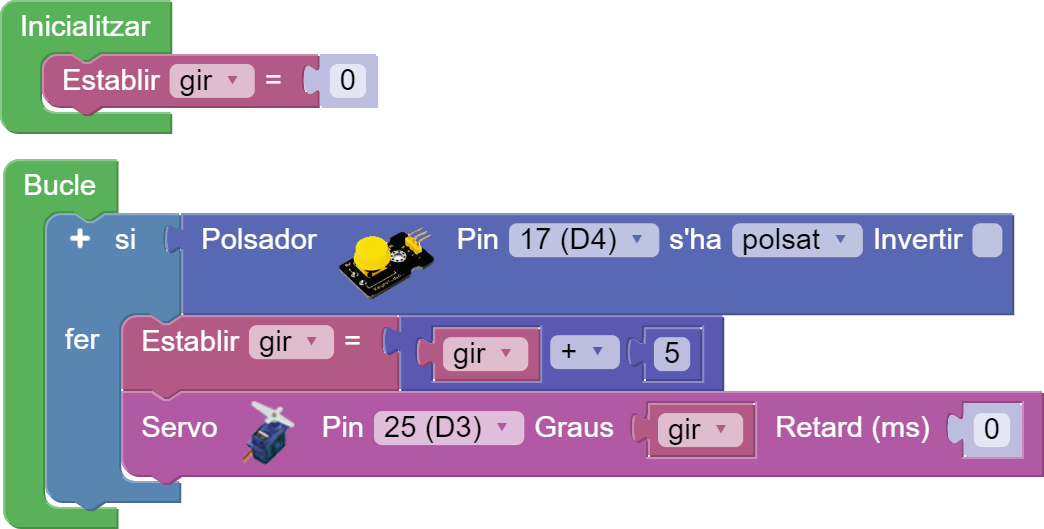
7. D’aquesta manera, esteu treballant amb el servomotor amb girs amb angles definits. Si voleu que l’angle de gir depengui d’algun altre paràmetre, podeu crear una variable i fer que l’angle de gir depengui del valor d’aquesta variable. Per exemple, si voleu que el servomotor giri 5º cada vegada que toqueu un polsador, podeu fer el següent: Connecteu un polsador (KS0029) a un pin de la placa (a l’exemple, el connectem al pin D3).
8. Des de la categoria “Variables”, creeu una variable del tipus nombre (a l’exemple l’anomenem “gir”). A continuació, situeu el bloc “Establir gir=0” dins del bloc “Inicialitzar”, d’aquesta manera, el valor inicial de la variable serà 0. Poseu un bloc de la categoria “Lògica” “Si…fer” al bloc “Bucle”. A continuació del “si”, col·loqueu el bloc “Polsador” que trobareu a la categoria “Sensors” i trieu el pin on el tingueu connectat (a l’exemple, el pin 3). A continuació del “fer”, actualitzareu el valor de la variable “gir”, sumant-li 5º. Per fer-ho, de la categoria “Variables”, escolliu el bloc “Establir gir” i a continuació, de la categoria “Matemàtiques” trieu un bloc de suma i a dins poseu-hi la variable “gir” més 5. Per últim, feu que el servomotor giri segons el valor d’aquesta variable, tal i com es mostra a la imatge:
9. Feu clic al botó “Puja” situat a dalt a la dreta