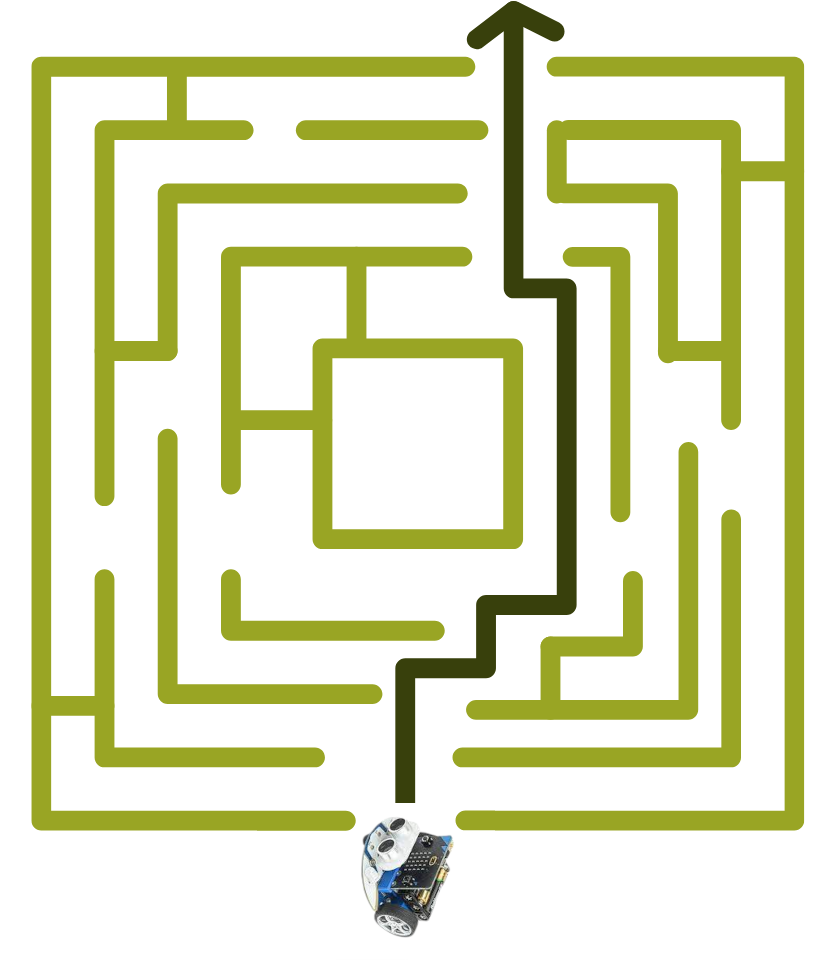
Amb l’ajuda del vostre robot i després d’enviar la seqüència correcta de colors, heu aconseguit desactivar l’escut protector del planeta Xeldon, acostant-vos així al laboratori on tenen retinguda la Dra. Snippet. Però ara s’ha presentat un nou obstacle: un laberint ple de trampes i perills!
Per sort, heu demostrat tenir molts recursos, així que segur que trobareu la manera d’introduir el robot al laberint perquè pugui superar tots els obstacles, arribar a l’altra banda i tocar el botó que desactiva els perills, permetent que pugueu passar sense cap risc.
La Dra. Gina Snippet us espera… Som-hi!


El sensor d’infraroigs
Per començar, mireu de respondre aquestes preguntes:
🔎 La placa té sensor d’infraroigs (IR)?
🔎 Com es poden connectar sensors externs a la placa?

Preparació de la missió
Per superar aquest repte us oferim quatre alternatives diferents, en funció del material que disposeu:
- Supera el teu laberint amb el comptador de passos de micro:bit: si teniu només la placa micro:bit, us proposem superar el repte travessant el laberint a partir del nombre de passes que cal fer en cada tram del recorregut.
- Supera el laberint amb la micro:bit i un dispositiu detector de línia: si disposeu de cables Dupont-pinça de cocodril com aquests, podeu dissenyar un dispositiu per seguir una línia negra utilitzant un sensor infraroig seguidor de línia.
- Supera el laberint amb la micro:bit i la micro:shield: si teniu la placa d’extensió micro:shield i una tira de leds, us proposem que construïu un dispositiu seguidor de línia que, a més s’il·lumini de colors diferents en funció del color que té a sota: vermell si no detecta la línia negra i verd si detecta la línia negra.
- Supera el laberint amb la micro:bit amb wappsto:bit: si teniu la placa wappsto:bit, podreu dissenyar un dispositiu seguidor de línia similar al que descriurem amb la micro:shield. La placa wappsto:bit us facilitarà la connexió del seguiment de línia.
Supera el teu laberint amb el comptador de passos de micro:bit
L’objectiu d’aquest repte és construir un comptador de passos amb la placa micro:bit per poder guiar-vos dins del laberint. Haureu de programar la micro:bit perquè compti els passos quan us moveu i després utilitzareu aquest comptador per navegar pel laberint.
🔸 Què necessiteu?
✅ Placa micro:bit.
✅ Powerbank o pack de piles.
🔸 Preparació de la missió
Primer de tot, estudieu l’espai disponible (l’aula, un passadís, el pati, etc.
La micro:bit té un sensor anomenat acceleròmetre que detecta moviments. Programareu la placa perquè compti els passos quan detecti un moviment de sacsejada.
- Podeu dibuixar un laberint a terra amb cinta adhesiva o fer un circuit amb obstacles.
- Cada alumne ha de recórrer el laberint fent passos i comprovant que el comptador de micro:bit registra correctament el moviment.
- Podeu establir un nombre màxim de passos per arribar a la meta.
- Un cop programada la placa, l’haureu de situar a sobre de la vostra sabata. Per fer això caldrà que utilitzeu el porta piles que alimenta la placa micro:bit.
🔸 Programació de la placa
- Obriu MakeCode
- Afegiu un bloc “quan es premi el botó A “ per posar el comptador de passos a 0.
- Afegiu una variable passos i establiu-la a 0 en iniciar.
- Afegeix un bloc quan es sacsegi perquè sumi 1 a la variable passos.
- Mostreu el nombre de passos prement el botó B.
- Quan programem amb micro:bit, una variable ens permet guardar informació i utilitzar-la més tard. En el vostre cas, necessiteu una variable per recordar el nombre de passos que fa l’alumne mentre supera el laberint.

🔸 Per què necessitem una variable?
✅ Perquè el micro:bit pugui recordar el nombre de passos
👉 Sense una variable, la micro:bit només detectaria els moviments, però no podria comptar quants passos s’han fet.
✅ Perquè podem sumar o reiniciar el comptador
👉 Si fem servir una variable anomenada passos, podem augmentar-ne el valor cada vegada que l’alumne fa un moviment i la podem posar a 0 quan vulguem començar de nou.
✅ Perquè podem mostrar el resultat a la pantalla
👉 Quan premem el botó B, la micro:bit ens mostra el nombre de passos que hem fet. Això només és possible perquè la variable passos guarda aquest número.
🔸 Blocs recomanats
Blocs d’entrada (polsadors A i B)


Blocs de variables


Mostrar números per la matriu de LED

🔸 Possibles millores
- Si trobeu que el codi només compta un de cada dos passos, modifiqueu el programa per multiplicar per dos la variable “passos” quan es mostri el valor.
- Mesureu la longitud d’una passa i feu que la micro:bit la multipliqui pel nombre de passos per calcular la distància que heu caminat.
🔸 Què necessiteu?
✅ Placa micro:bit.
✅ Powerbank o pack de piles.
✅ Cables Dupont – pinces de cocodril.
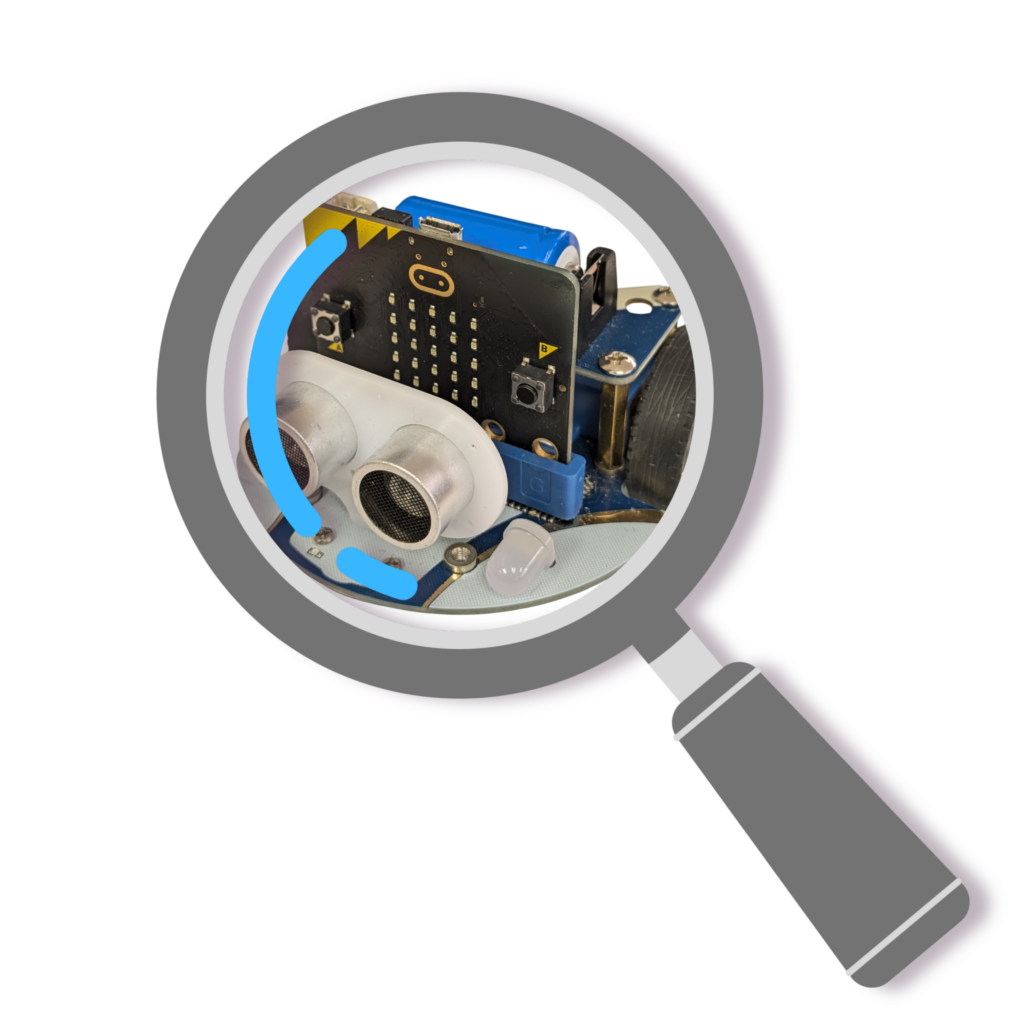
✅ Sensor IR detector de línia.
✅ Cartolines negres o cinta adhesiva negra.
✅ Tub de cartró d’un paper de cuina o llistó (de fusta o plàstic).
✅ Tisores, cinta adhesiva, cargols i femelles, gomes elàstiques, brides…
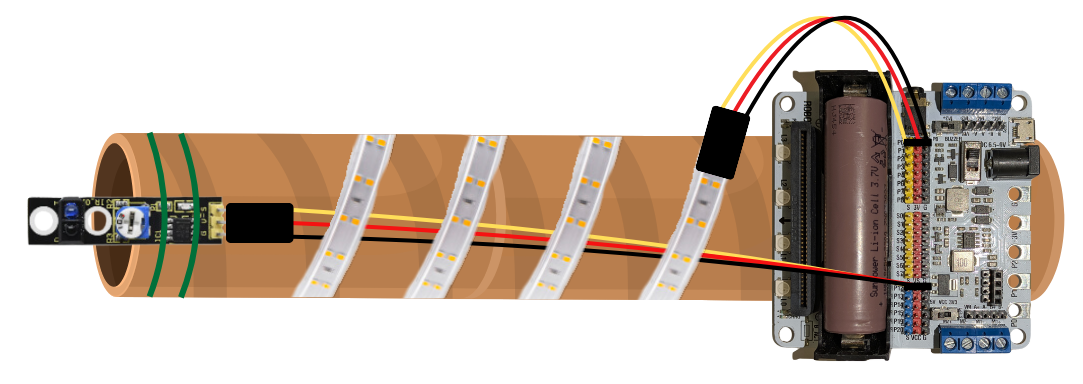
🔸 Construcció del dispositiu
Prepareu el camí que porta al laboratori a través del laberint. Us proposem que, en una paret blanca, enganxeu diversos fragments fets amb cartolina negra que formaran el camí o bé que marqueu el camí amb cinta adhesiva negra.
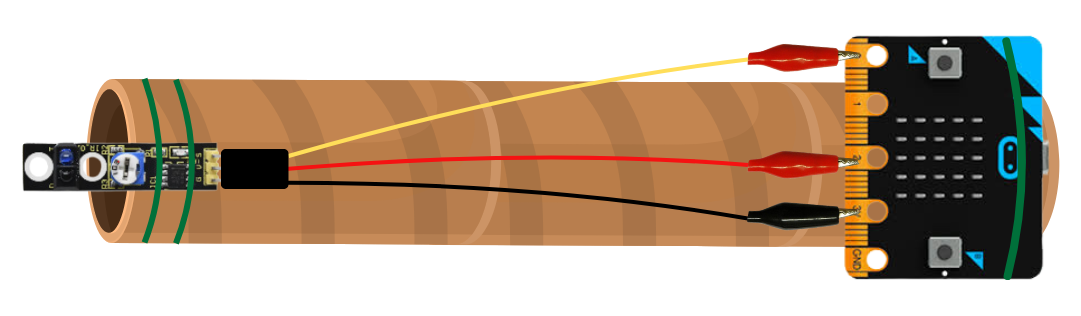
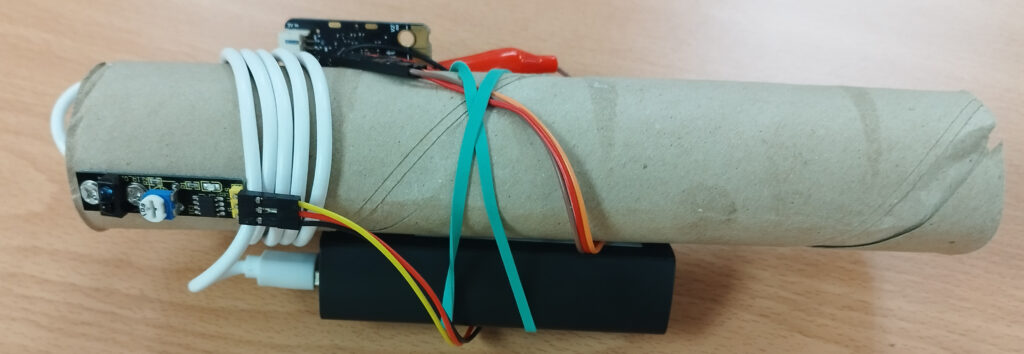
També heu de preparar una eina detectora que us permeti resseguir el camí. Serà un tub de cartró o un llistó de fusta o plàstic.
Un dels extrems serà el mànec de l’eina, per poder-la subjectar. En l’altre extrem hi haurà el sensor IR detector de línia, es pot fixar amb cargol i femella o amb qualsevol altre sistema (gomes, brides…). Enmig hi haurà la placa micro:bit:
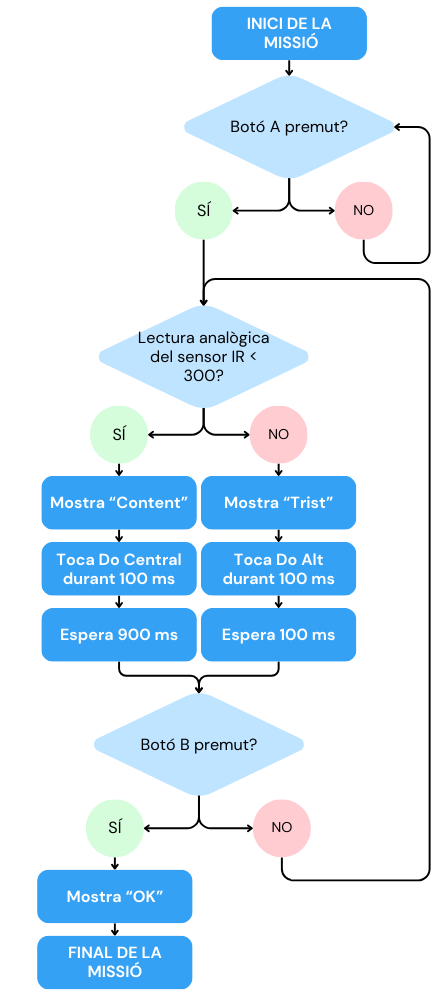
Inicialment, haureu de situar l’eina al principi del camí (color negre). A partir d’aquí, quan premeu el botó “A” de la micro:bit la pantalla anirà mostrant si l’eina és dins o fora del camí.
També heu de programar orientacions sonores per a la travessa: tons intermitents a baixa freqüència en el camí i tons intermitents diferents a alta freqüència fora del camí.
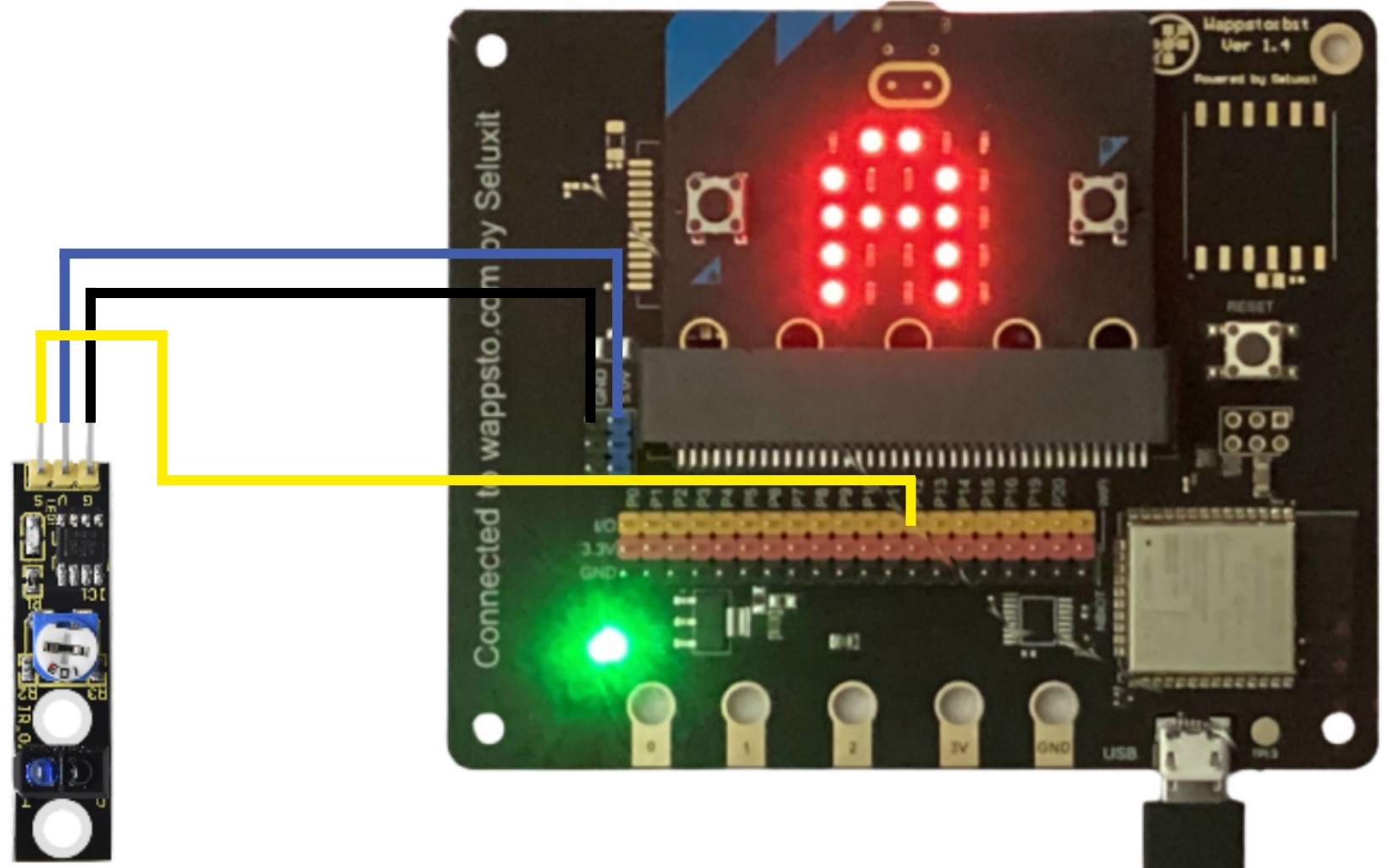
Feu les connexions entre el sensor seguidor de línia i la placa micro:bit seguint aquesta disposició:
- G: connecteu-lo al pin GND de la placa micro:bit.
- V: connecteu-lo al pin 3V de la placa micro:bit
- S: connecteu-lo al pin P1 de la placa micro:bit
Finalment, connecteu el powerbank o el pack de piles a la micro:bit.
Aquest és un exemple de com es pot construir l’eina amb una micro:bit, un detector de línia i un powerbank. No oblideu ser creatius, com serà la vostra eina?
🔸 Programació de la placa
Per saber si esteu a sobre de la línia negra o no, haureu d’utilitzar el bloc analògic.
![]()
Us recomanem que feu una prova per determinar el valor de llindar entre la superfície blanca i negra, que serà el que utilitzareu per configurar el bloc condicional. Al diagrama de flux hem considerat un valor de 300.
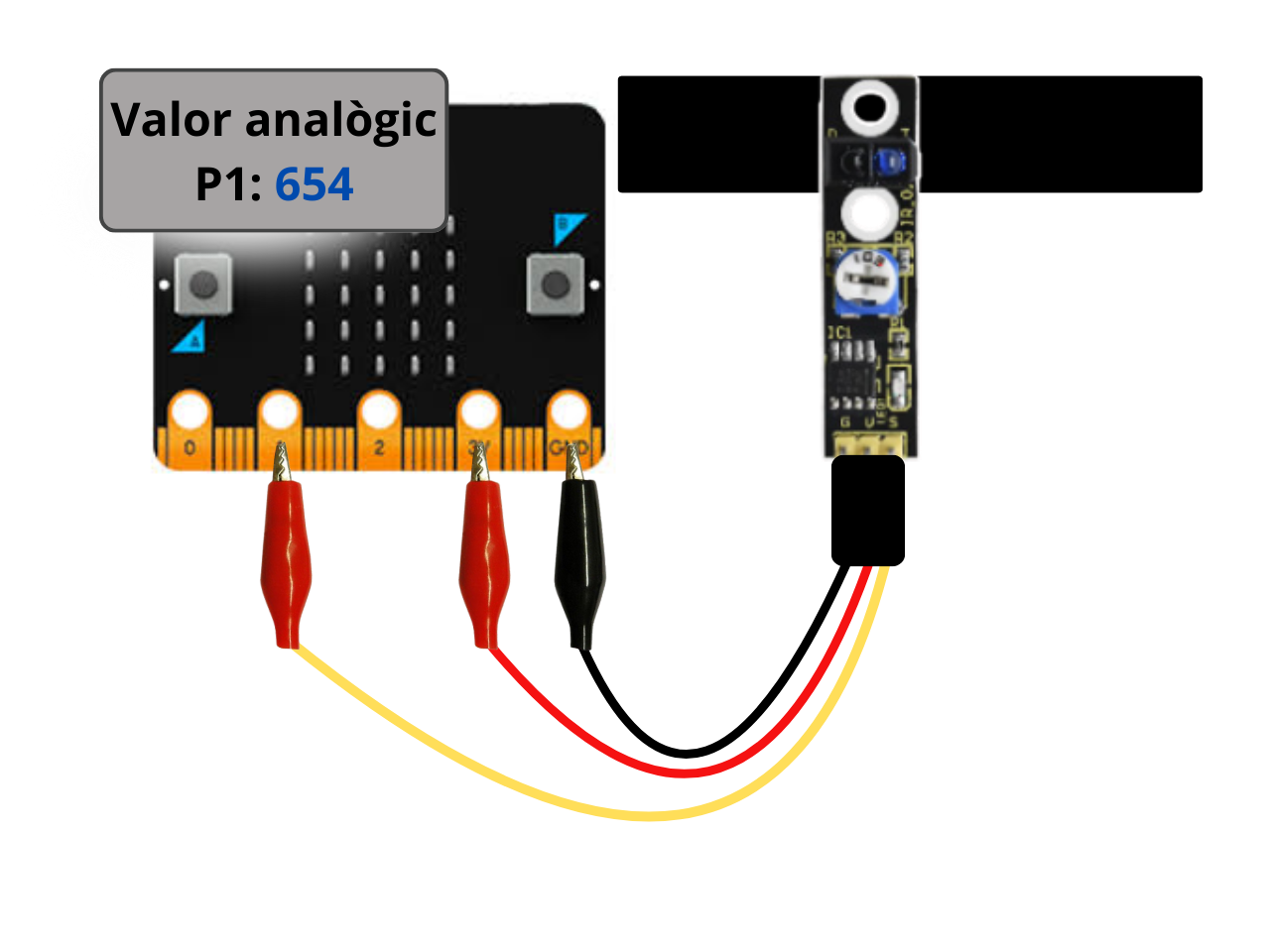
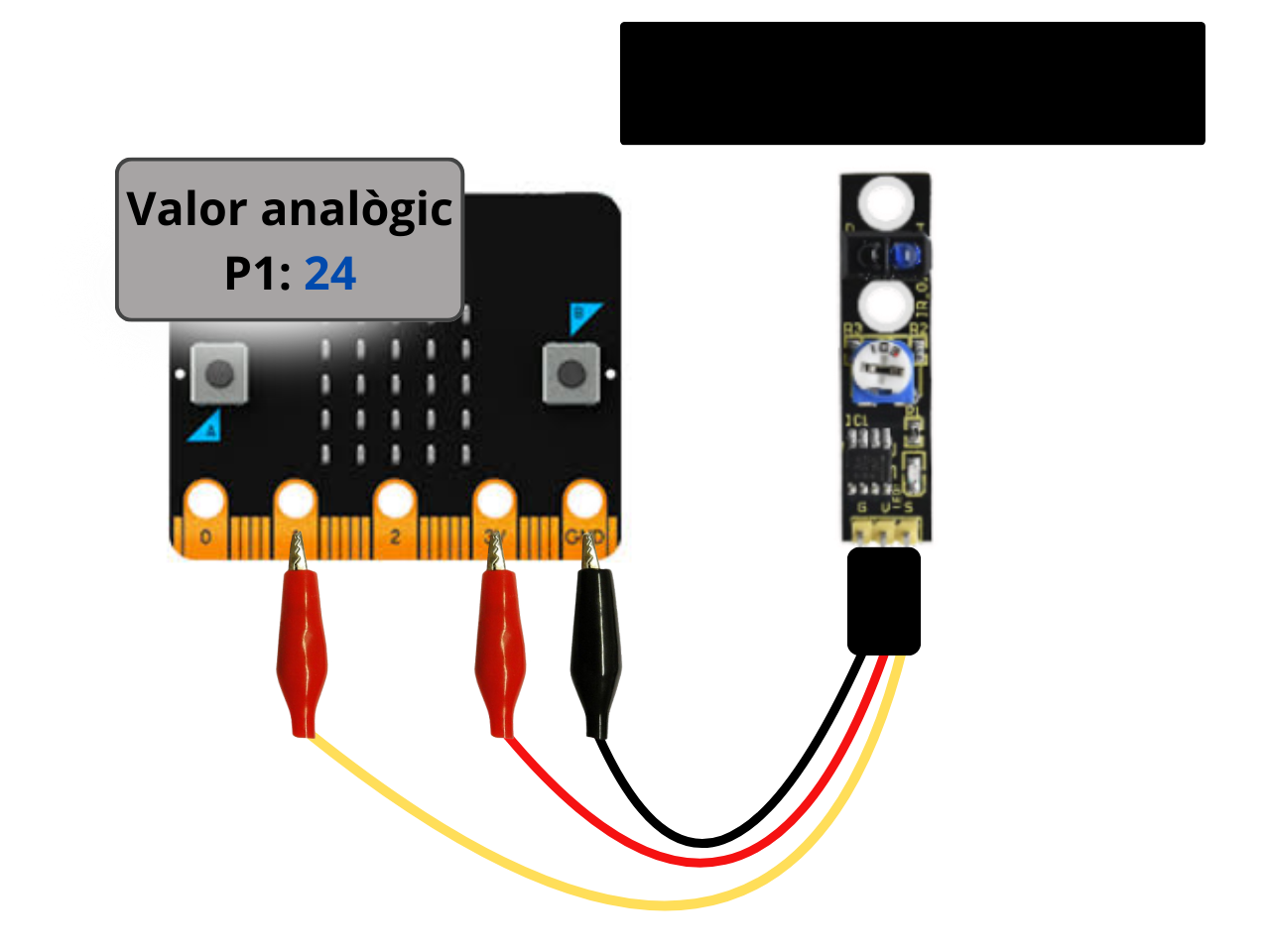
Diagrama de flux
Només amb micro:bit (lectura analògica a 3V)
Amb placa d’extensió (lectura digital a 5V)
🔸 Què necessiteu?
✅ Placa micro:bit.
✅ Placa d’extensió micro:shield,
✅ Sensor IR detector de línia.
✅ 1 cable GVS.
✅ 1 tira de leds.
✅ Cartolines negres o cinta adhesiva negra.
✅ Tub de cartró d’un paper de cuina o llistó (de fusta o plàstic).
✅ Tisores, cinta adhesiva, cargols i femelles, gomes elàstiques, brides…
🔸 Construcció del dispositiu
Prepareu el camí que porta al laboratori a través del laberint. Us proposem que, en una paret blanca, enganxeu diversos fragments fets amb cartolina negra que formaran el camí o bé que marqueu el camí amb cinta adhesiva negra.
També heu de preparar una eina detectora que us permeti resseguir el camí. Serà un tub de cartró o un llistó de fusta o plàstic.
Un dels extrems serà el mànec de l’eina, per poder-la subjectar. En l’altre extrem hi haurà el sensor IR detector de línia, es pot fixar amb cargol i femella o amb qualsevol altre sistema (gomes, brides…). Enmig hi haurà la placa micro:shield amb la placa micro:bit:
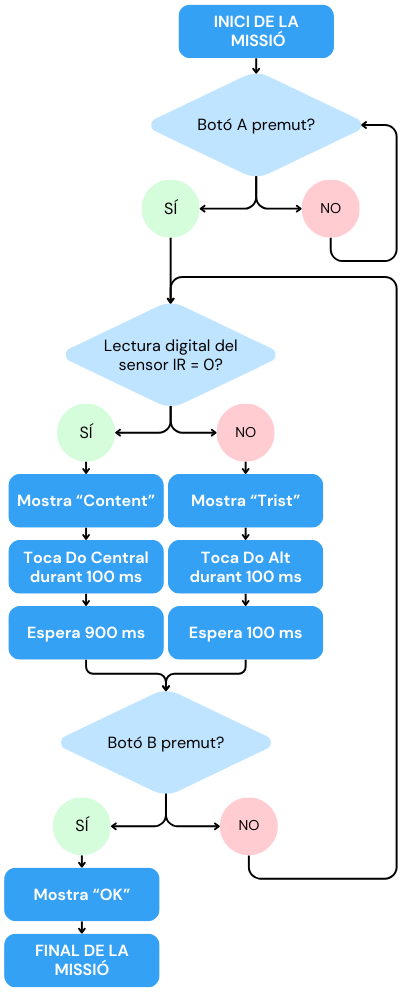
Inicialment, haureu de situar l’eina al principi del camí (color negre). Si el dispositiu detecta que estem a la zona blanca, la tira de leds s’ha d’encendre de color vermell. Quan estigui sobre la línia negra, s’haurà d’encendre de color verd:
Feu les connexions entre el sensor seguidor de línia i la placa micro:shield utilitzant un cable GVS i connecteu-lo a un dels pins digitals de la placa. A l’exemple utilitzem el pin P12.
⚠️ Important: assegureu-vos que el selector de voltatge de la placa micro:shield estigui posicionat a 5 V:
🔸 Programació de la placa
Per saber si esteu a sobre de la línia negra o no, haureu d’utilitzar el bloc digital (que pot vendre valors 0 o 1).
![]()
Per treballar amb la tira de leds, primer heu de carregar l’extensió “neopixel”. Aneu a

Busqueu l’extensió “neopixel”:
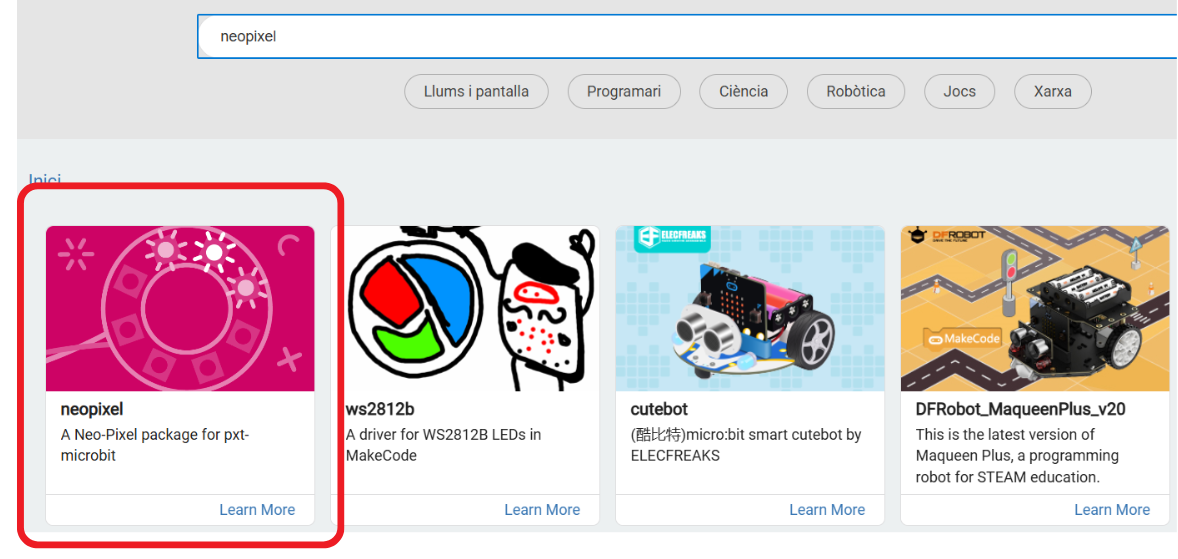
A la columna de categories de makecode us apareixerà una nova categoria anomenada “neopixel”.
La tira de leds s’ha d’inicialitzar. Al bloc “En iniciar”, situeu-hi el bloc “Assigna strip el valor…”. Canvieu el nombre que hi ha a 30, que són els leds que té la tira de leds del conjunt:

Per canviar el color de la tira de leds, trieu el bloc “strip show color…” i seleccioneu el color que calgui:

Configureu el condicional amb el bloc “si cert…” de la categoria “Lògica”, per tal que tingui el funcionament esperat: verd quan està sobre la línia i vermell quan està sobre la zona blanca.
🔸 Què necessiteu?
✅ Placa micro:bit.
✅ Placa d’extensió wappsto:bit.
✅ Sensor IR detector de línia.
✅ 1 cable GVS.
✅ Cartolines negres o cinta adhesiva negra.
✅ Tub de cartró d’un paper de cuina o llistó (de fusta o plàstic).
✅ Tisores, cinta adhesiva, cargols i femelles, gomes elàstiques, brides…
Per fer el repte amb aquesta extensió, podeu seguir les mateixes instruccions que teniu per a la placa micro:bit amb dispositiu detector de línia negra.
La placa d’extensió wappsto:bit, en aquesta ocasió, la utilitzareu només per facilitar-vos la connexió del sensor seguidor de línia. Feu les connexions com es veu a la imatge, utilitzant cables de tipus Dupont.
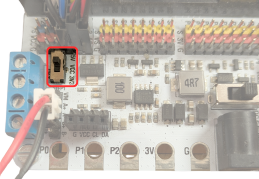
- G: connecteu-lo al pin GND de la placa wappsto:bit.
- V: connecteu-lo al pin 5.0V (blau) de la placa wappsto:bit.
- S: connecteu-lo al pin I/O P12 de la placa wappsto:bit.
No caldrà que carregueu l’extensió “wappsto:bit”, ja que, com hem esmentat, en aquesta ocasió utilitzem la placa només per facilitar-nos les connexions i no cal utilitzar cap de les funcionalitats extres que ens podria aportar aquesta placa d’extensió.
Blocs recomanats
A continuació us donem algunes idees sobre els blocs de programació que podeu d’utilitzar:
👉🏾 Bàsic :
👉🏾 Lògica:![]()
![]()
👉🏾 Bucles:
👉🏾 Entrada: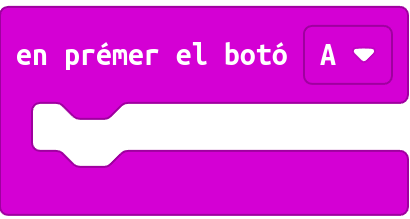

👉🏾 Música: 
👉🏾 Pins:![]()
![]()
👉🏾 Tira de leds:


Possibles millores
🔸Feu el repte més exigent: programeu que, mentre se segueix el camí, sigui necessari mantenir l’eina ben vertical (utilitzeu els blocs “absolut” de la categoria “Matemàtiques i “inclinació x” de la categoria “Entrada”).
🔸Programeu que la micro:bit detecti que s’ha arribat al final del camí.
🔸Incorporeu un efecte sonor al final del camí.
Exemples i materials d’ajuda

El sensor d’infraroigs
Per començar, mireu de respondre aquestes preguntes:
🔎 Smart Cutebot té sensors d’infraroigs?
🔎 Si en té, on són?
🔎 Com funcionen?
🔎 Com es programen?
Què necessiteu?
La missió la fareu a terra o sobre una taula.
✅ Robot Smart Cutebot.
✅ Placa micro:bit.
✅ Estovalles blanques de paper.
✅ Retolador negre mat.
✅ Retolador d’un color diferent.
Preparació de la missió
Dibuixeu el laberint en les estovalles de paper amb el retolador de color. Després dibuixeu el camí que ha de seguir el robot per travessar el laberint, traçat en color negre mat.
Cal tenir en compte el gruix de la línia que ha de seguir el robot. Per fer les proves inicials podeu fer servir el circuit que incorpora el kit del robot.
El camí no ha de tenir revolts molt tancats ni canvis de direcció bruscos, per evitar que el robot surti del camí.
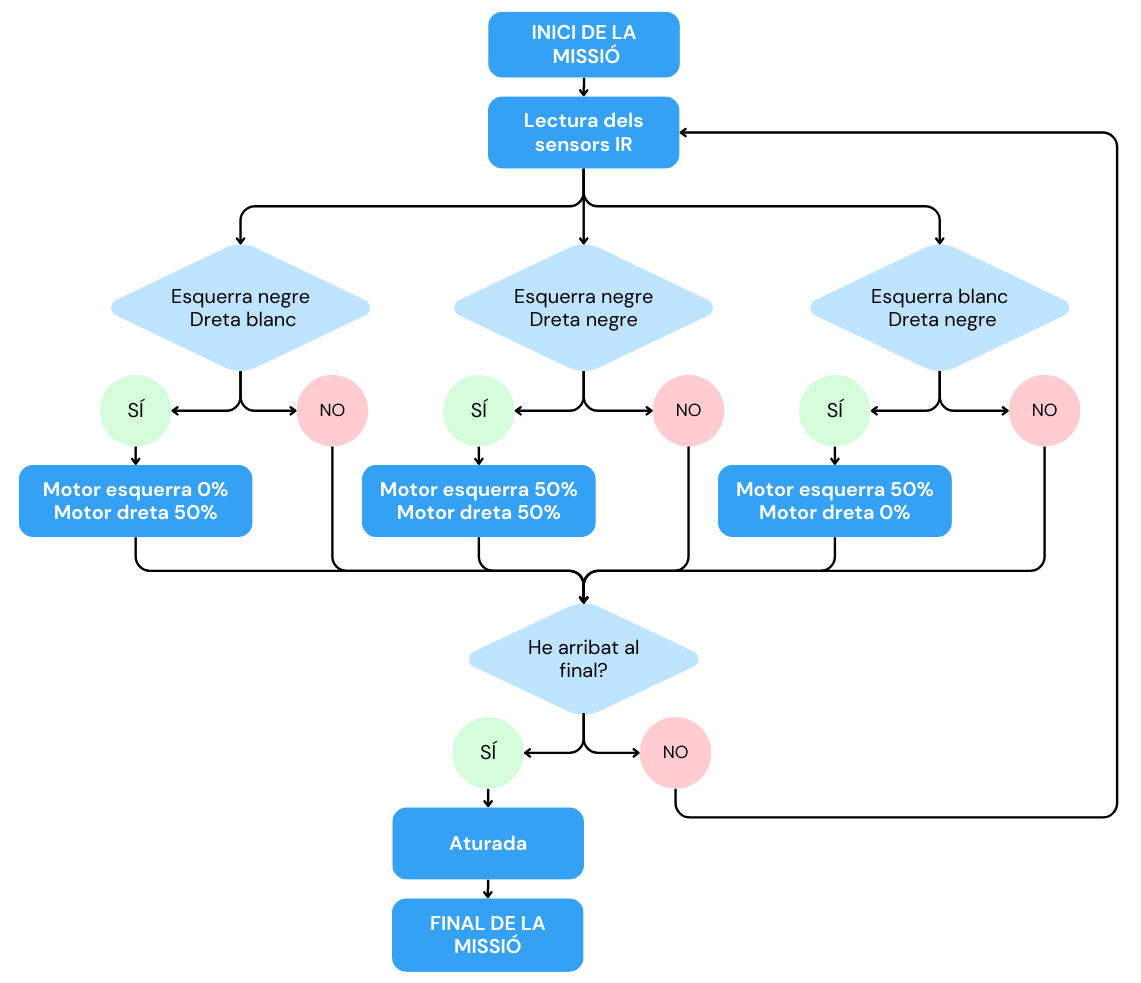
Programació del robot
Programeu l’avançament del robot sobre la línia negra. Hi ha 3 situacions possibles:
- Si tots dos sensors detecten color negre: el robot està sobre el camí! Haureu de donar la instrucció al robot perquè avanci en línia recta.
- Si el sensor esquerre detecta color blanc i el sensor dret detecta color negre: el robot està sortint del camí per l’esquerra! Perquè no es desviï de la trajectòria, haureu de fer que el robot giri a la dreta per fer-lo tornar al camí.
- Si el sensor dret detecta color blanc i el sensor esquerre detecta color negre: el robot està sortint del camí per la dreta! Perquè no es desviï de la trajectòria, haureu de fer que el robot giri a l’esquerra, per fer-lo tornar al camí.
Diagrama de flux
Blocs recomanats
A continuació us donem algunes idees sobre els blocs de programació de makecode que podeu d’utilitzar
👉🏾 Bàsic:
👉🏾 Lògica:
![]()
👉🏾 Bucles:
👉🏾 Cutebot:
![]()

![]()
Millores del programa
🔸Programeu què ha de passar quan els dos sensors detectin color blanc (tornar al camí).
🔸Programeu la pantalla de la micro:bit (cara alegre en el camí, cara trista fora del camí).
🔸Afegiu orientacions sonores per a la travessa (tons intermitents a baixa freqüència en el camí i tons intermitents diferents a alta freqüència fora del camí).
Exemples i material de consulta
En aquesta activitat del catàleg de robòtica teniu un exemple de com programar el robot Smart Cutebot:

El sensor d’infraroigs
Per començar, mireu de respondre aquestes preguntes:
🔎 La placa té sensor d’infraroigs (IR)?
🔎 Com es poden connectar sensors externs a la placa?
Què necessiteu?
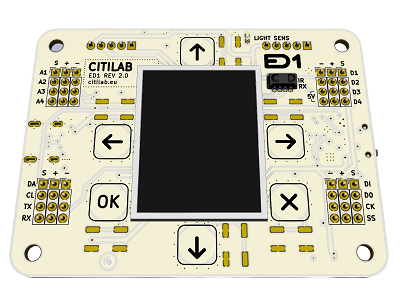
✅ Placa ED1.
✅ Pila de la placa ED1.
✅ Sensor IR detector de línia.
✅ 1 cable GVS.
✅ Cartolines negres o cinta adhesiva negra.
✅ Tub de cartró d’un paper de cuina o un llistó (de fusta o plàstic).
✅ Tisores, cinta adhesiva, cargols i femelles, gomes elàstiques…
Preparació de la missió
Prepareu el camí que porta al laboratori a través del laberint. Us proposem que, en una paret blanca, enganxeu diversos fragments fets amb cartolina negra que formaran el camí o bé que marqueu el camí amb cinta adhesiva negra.
També heu de preparar una eina detectora que us permeti resseguir el camí. Serà un tub de cartró o un llistó de fusta o plàstic.
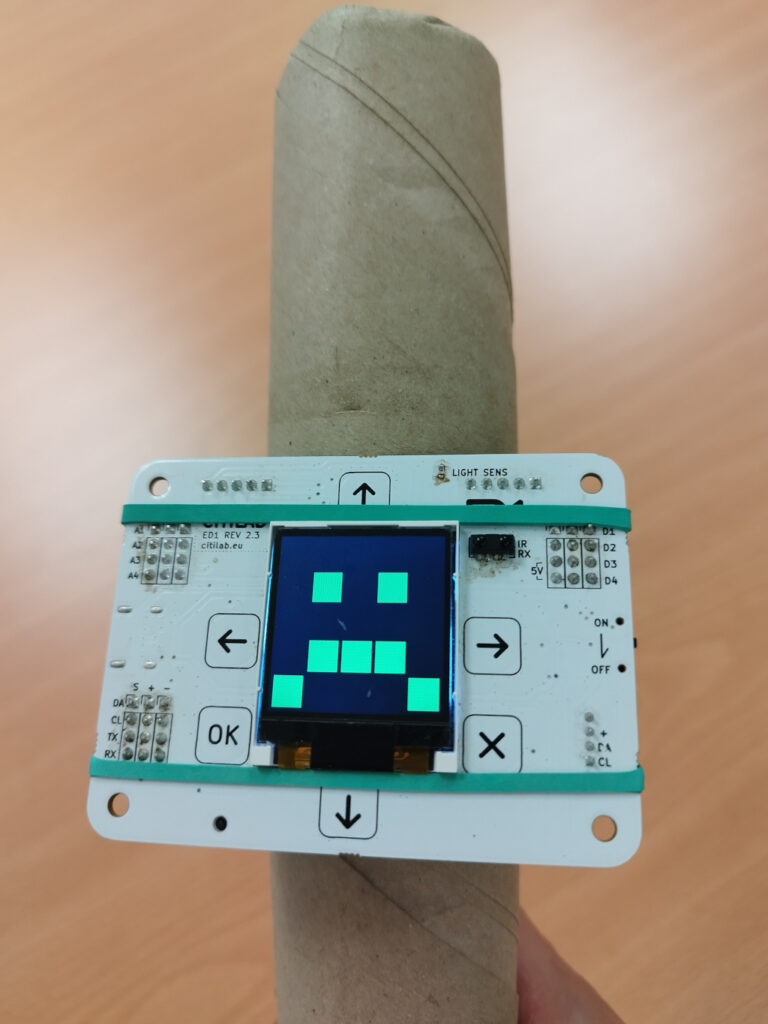
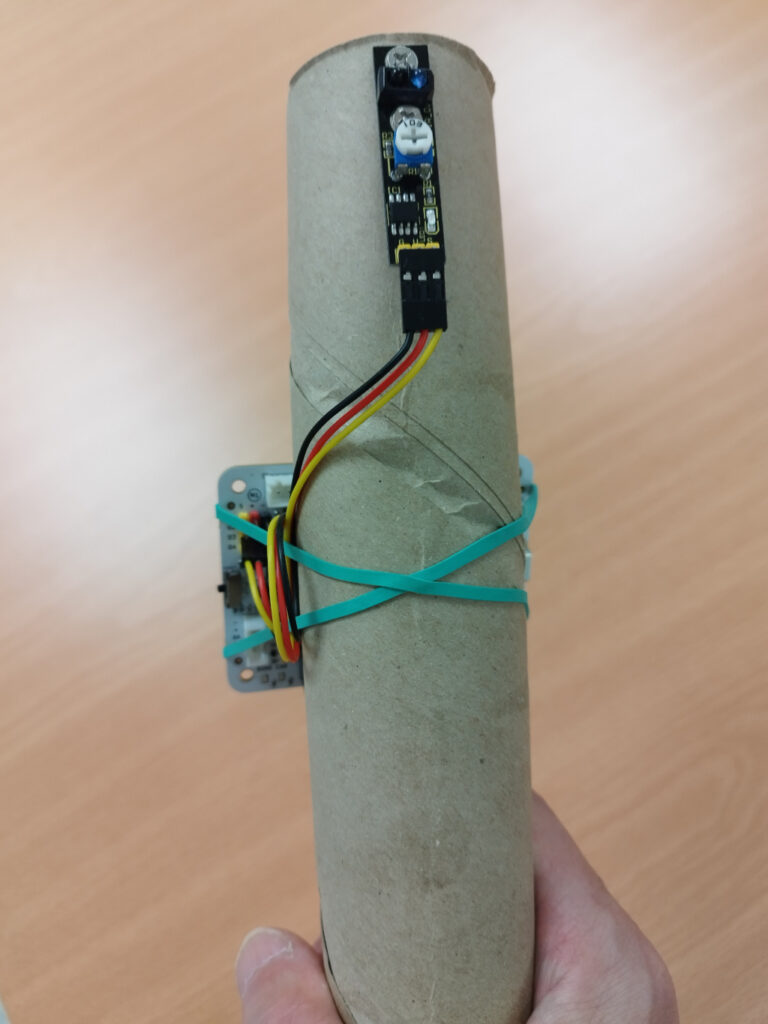
Un dels extrems serà el mànec de l’eina, per poder-la subjectar. En l’altre extrem hi haurà el sensor IR detector de línia, es pot fixar amb cargol i femella. Enmig hi haurà la placa ED1.
Connecteu el sensor IR detector de línia al pin D3 de la placa ED1:
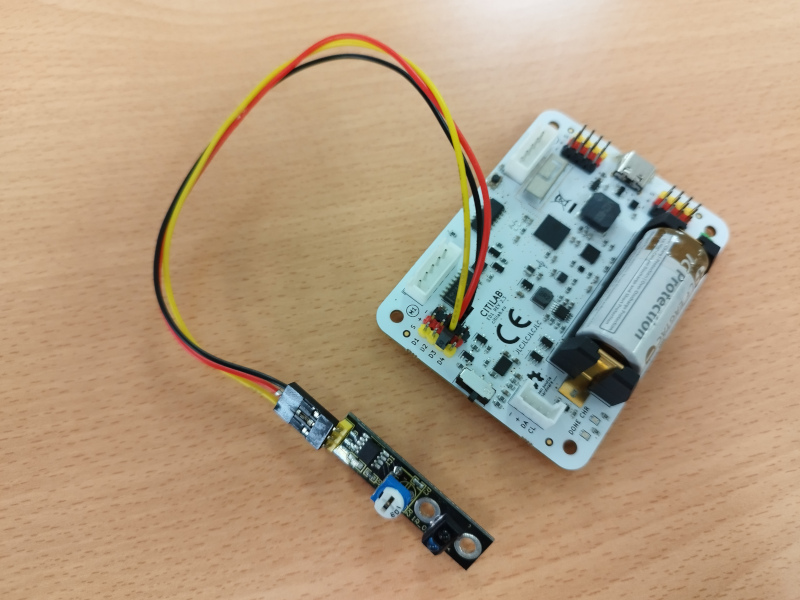
Aquest és un exemple de com es pot construir l’eina amb una placa ED1 i un detector de línia. No oblideu ser creatius, com serà la vostra eina?
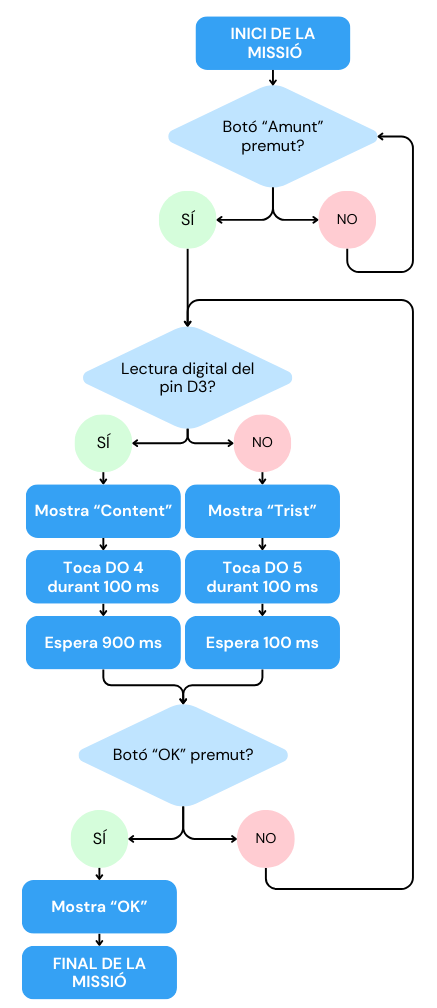
Programació de la placa
Inicialment, haureu de situar l’eina al principi del camí (color negre). A partir d’aquí, quan premeu el botó “Amunt” de la placa ED1 la pantalla anirà mostrant si l’eina és dins o fora del camí.
També heu de programar orientacions sonores per a la travessa: tons intermitents a baixa freqüència en el camí i tons intermitents diferents a alta freqüència fora del camí.
En arribar al final del camí, s’ha de prémer el botó “OK” per completar la missió.
Diagrama de flux
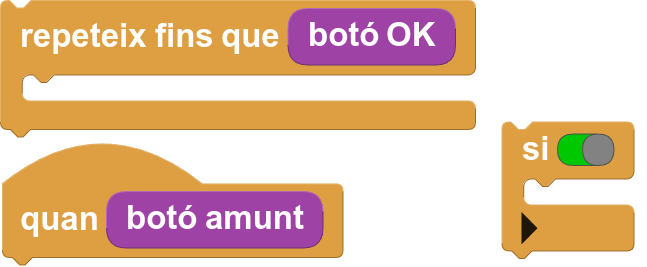
Blocs recomanats
A continuació us donem algunes idees sobre els blocs de programació que podeu emprar amb MicroBlocks. Per utilitzar els botons de la placa i la seva pantalla haureu d’afegir les llibreries “Botons ED1”, “Pantalla LED” i “Tons”:
👉🏾 Control i Botons ED1 :
![]()
👉🏾 Pantalla LED:
👉🏾 Tons:![]()
👉🏾 Pins:![]()
Millores del programa
🔸Feu el repte més exigent: programeu que, mentre se segueix el camí, sigui necessari mantenir l’eina ben vertical (utilitzeu els blocs “valor absolut de” de la categoria “Operadors” i “inclinació x” de la llibreria “Sensors bàsics”).
🔸Incorporeu un efecte sonor al final del camí.
🔸En comptes d’utilitzar el botó “OK” per indicar que s’ha arribat a la sortida del laberint, feu servir el sacseig de la placa.
🔸Canvieu el color de les icones de la pantalla: verd en el camí, vermell fora del camí, blau a la sortida del laberint.
Exemples i materials d’ajuda
A les guies ràpides “Programar els botons” i “Programar la pantalla LED” podeu veure programes senzills per utilitzar els botons i la pantalla de la placa ED1.