
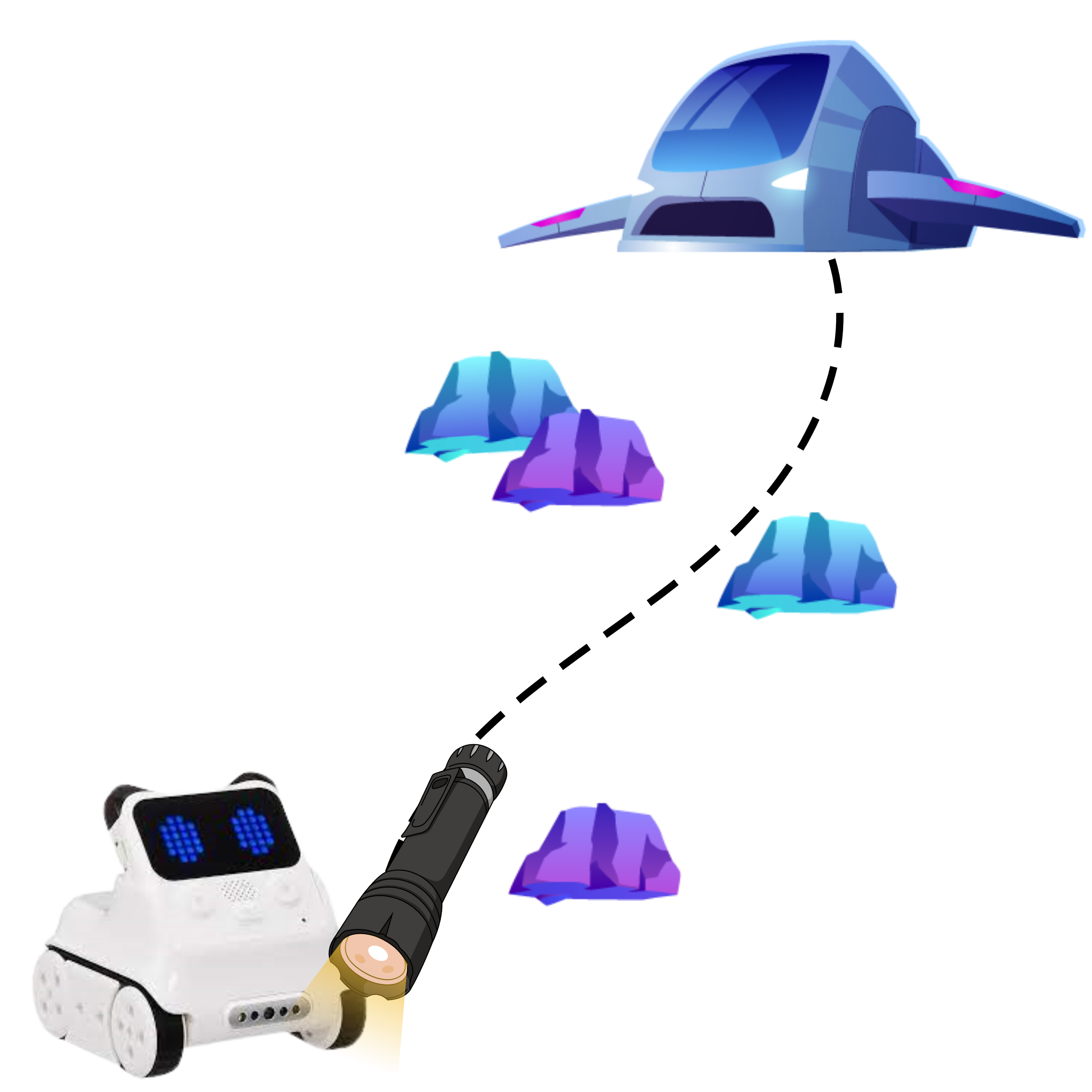
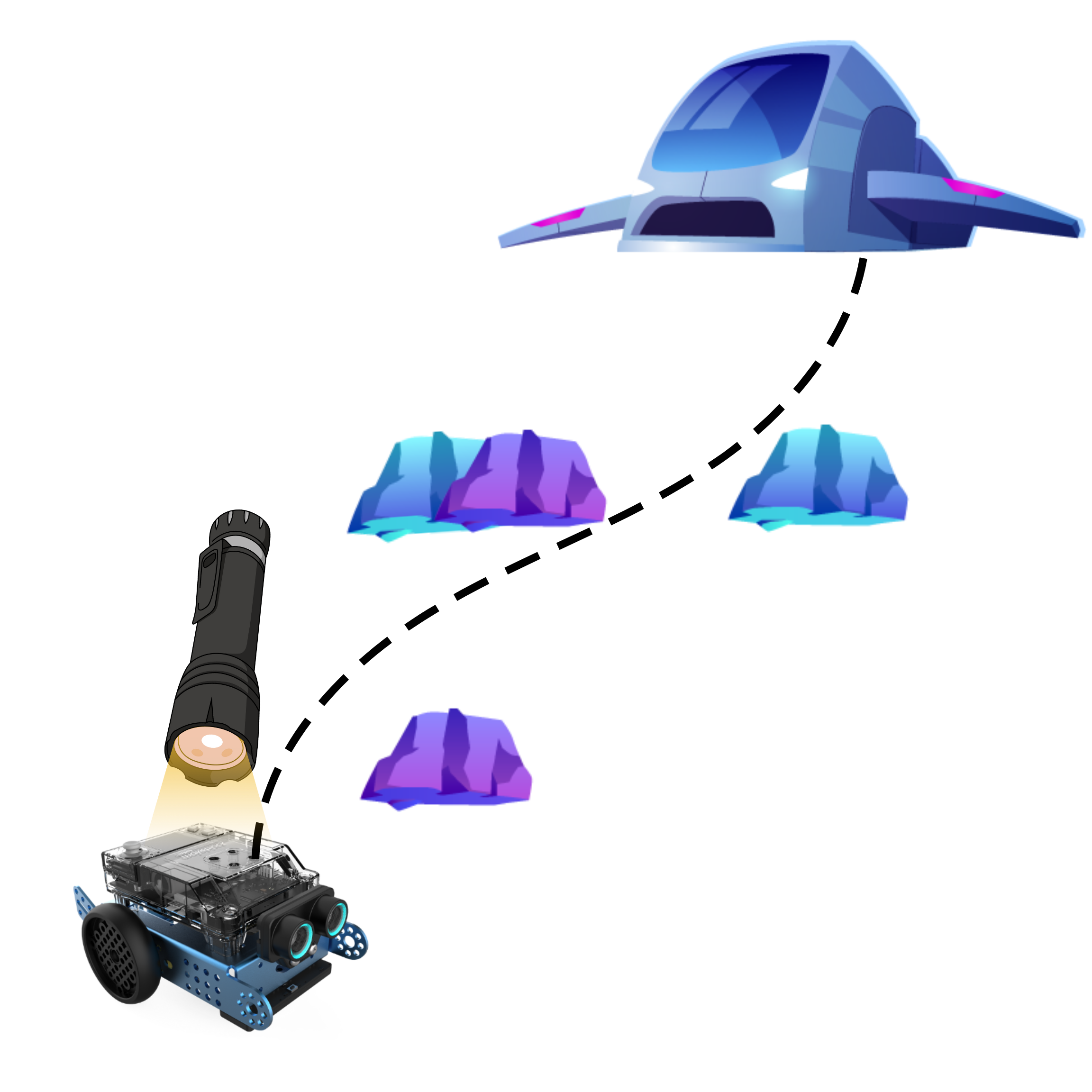
Som a un planeta misteriós de la galàxia X-32. Com sabeu, tenim la missió de rescatar la gran científica Dra. Snippet, que ha estat segrestada pels malvats xeldonians. Per fer-ho, teniu un robot que us ajudarà al llarg de tota l’aventura.
El problema és que el vostre robot està perdut pel planeta i ha de trobar la vostra nau.
Per sort, el robot és capaç de seguir un rastre lluminós. Sereu capaços de programar-lo per guiar-lo fins a la vostra nau?
 Escolliu el vostre robot
Escolliu el vostre robot



Ajustem la missió
Com heu observat analitzant el robot, el Dash no té cap sensor de llum, així que haureu de fer alguna modificació al repte.
Us proposem un repte col·laboratiu en el qual haureu de coordinar-vos constantment per assolir l’èxit de la missió!
En aquesta versió del repte, el robot no haurà de seguir la llum per arribar a la nau, sinó que haureu de “portar” la llum des del punt inicial fins a la nau, passant-la d’un robot a un altre, com si fossin els relleus de la torxa olímpica.
Què necessiteu?
La missió la fareu a terra, utilitzant robots Dash. Necessitareu:
✅ Un objecte que faci de nau, és a dir, objectiu de la missió. Fixeu-lo amb cinta adhesiva.
✅ Diversos robots Dash
✅ Cinta mètrica per mesurar les distàncies entre els robots.

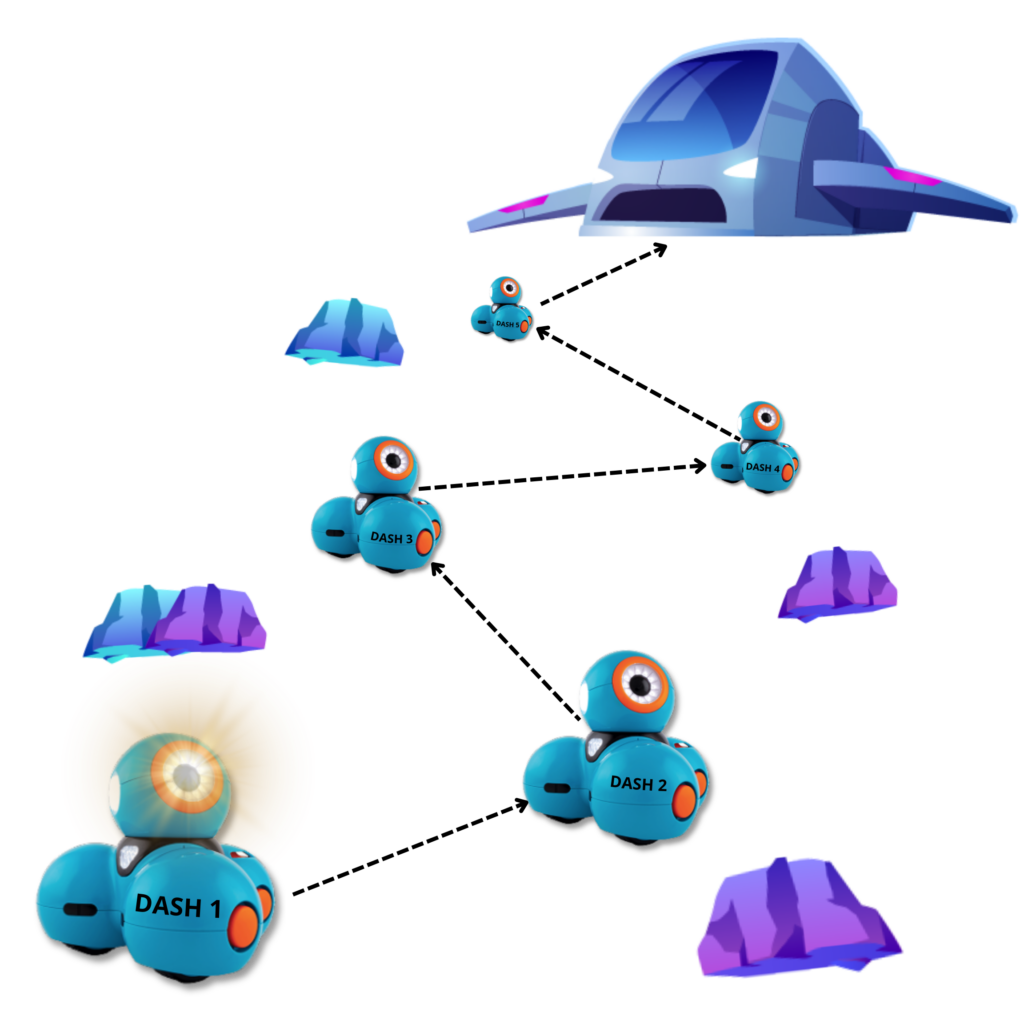
Col·locació dels robots
Abans de començar la programació dels robots, caldrà col·locar-los al terra. Situeu el robot que farà el primer relleu al punt d’inici de la missió i, a partir d’aquest, aneu situant robots a diversos punts de l’aula. Tingueu la precaució d’assegurar que la distància en centímetres entre un robot i el següent sigui un múltiple de 10, ja que el robot Dash avança de 10 en 10 cm. Feu una marca al terra just al lloc on anirà cada robot, i així els podreu moure si us fa falta durant la programació.
Programació dels robots
Per orientar els robots cap al següent robot, podeu fer-ho manualment, o bé fer que s’orienti a través de la programació.
En primer lloc mesureu el temps que triga cada robot fins arribar al següent. Aquest temps us farà falta posteriorment per anar modificant el temps que ha d’esperar cadascun dels robots abans de sortir i encendre la seva llum, i també per apagar-la quan arribi al seu destí… Ja veieu que caldrà molta coordinació entre grups!
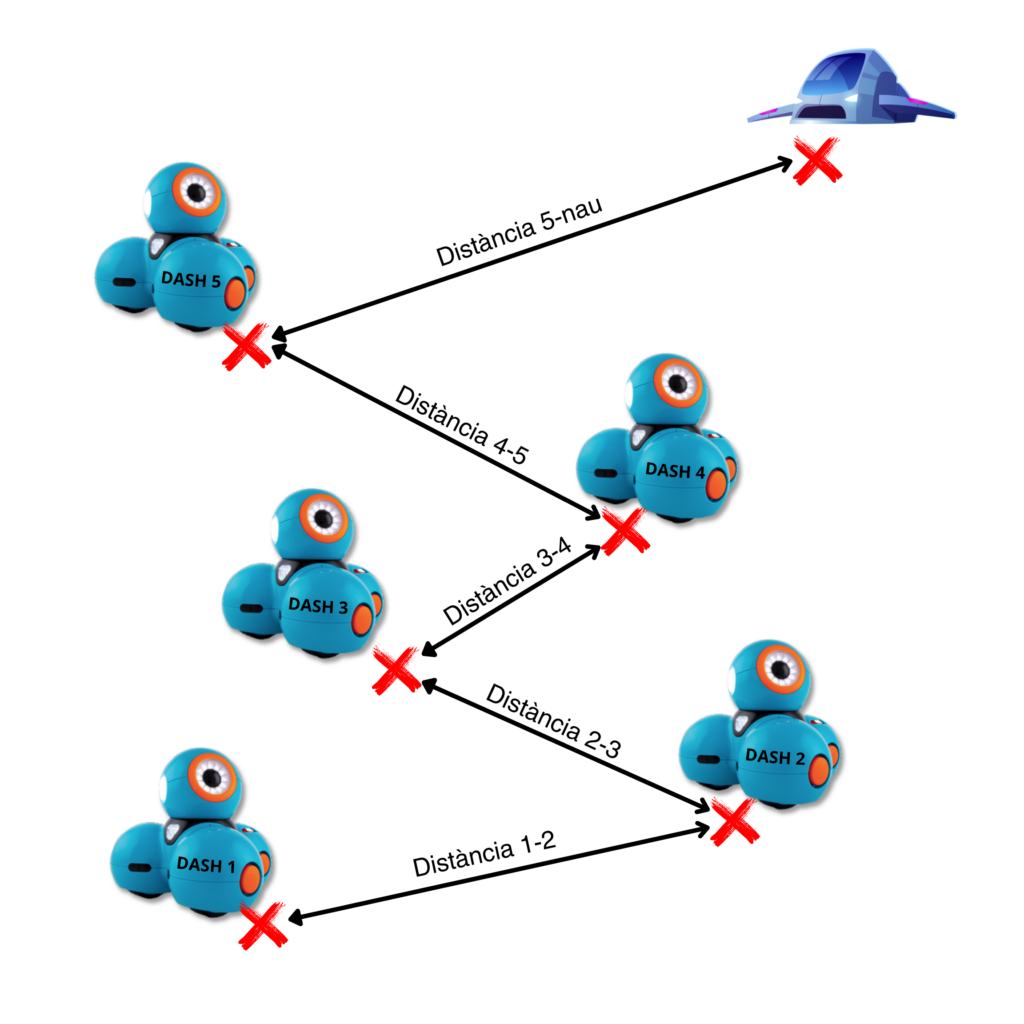
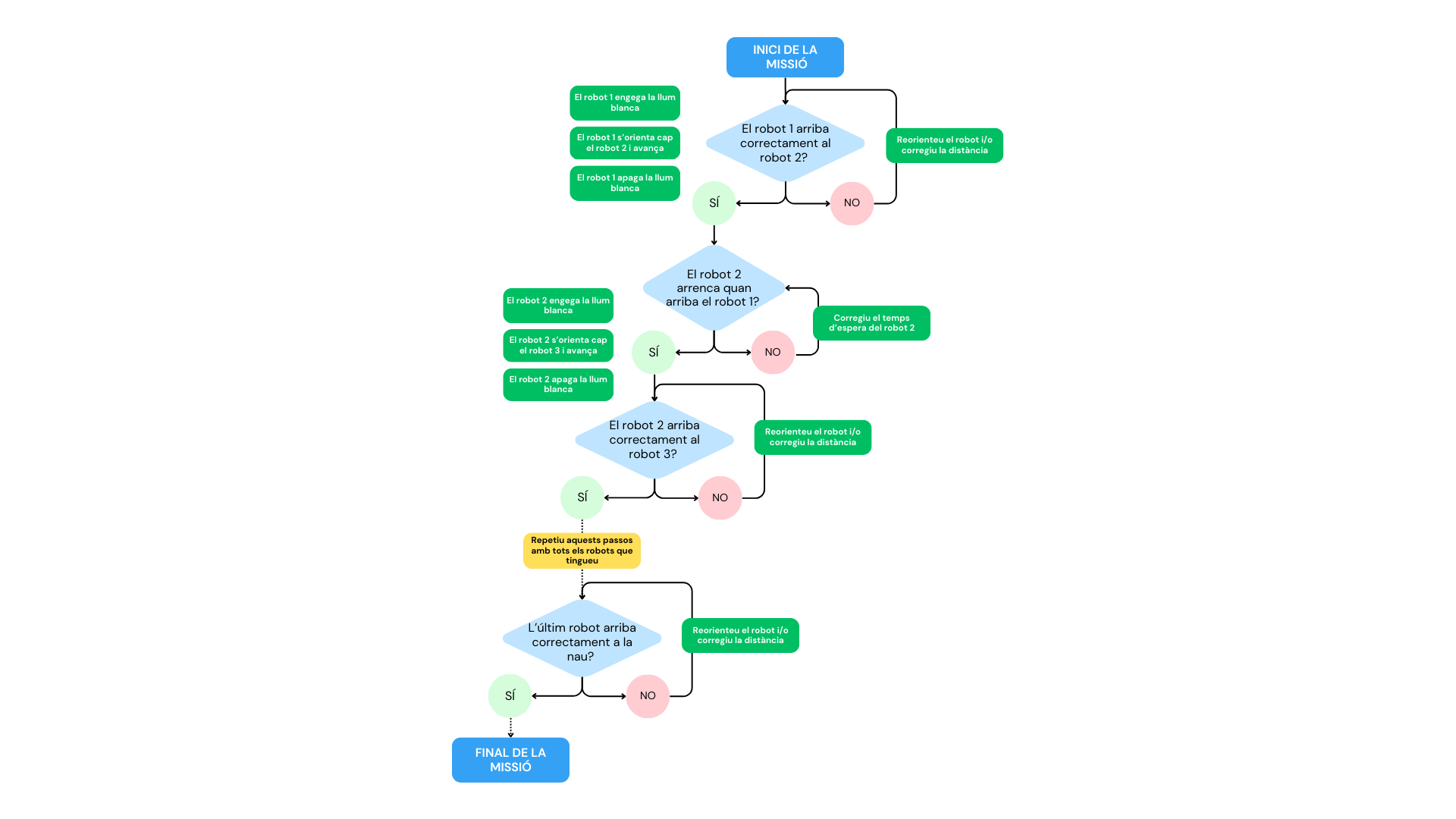
Diagrama de flux
En verd hi ha indicacions del que heu de fer entre un punt de decisió i un altre.
En blau, les decisions que ha de prendre el robot abans de seguir endavant amb la missió.
Blocs recomanats
A continuació us donem algunes idees sobre els blocs de programació de Dash que podeu d’utilitzar:
👉🏾 Esdeveniments (per començar): 
👉🏾 Acció (per moure’s endavant): ![]()
👉🏾 Acció (per girar): ![]()
![]()
👉🏾 Llums (apagar totes): ![]()
![]()
👉🏾 Temps: ![]()
Recomanacions
Abans de començar a programar, mesureu bé les distàncies entre els robots i feu les marques al terra.
🔸 Programació
- Programeu cada robot per anar d’un punt al següent i mesureu el temps que triga en fer-ho.
- El Dash només permet posar temps enters, si cal, modifiqueu la velocitat d’avançament del robot per ajustar els temps a nombres enters.
- El temps màxim d’espera del Dash és de 10 segons així que, probablement, us caldrà posar uns quants blocs d’espera per als últims robots.
- Apunteu en algun lloc ben visible a l’aula les distàncies entre els robots i els temps que heu mesurat per tal que els diversos grups puguin anar ajustant els temps d’espera dels seus robots.
🔸 Millores del programa
- Feu que tots els robots celebrin a la vegada l’èxit de la missió.
- Afegiu efectes sonors en alguns dels passos de la missió.
- Feu que tots els robots comencin orientats cap a la mateixa direcció i girin quan els toqui el seu torn d’avançar.
- Situeu obstacles a les trajectòries dels robots i feu que els hagin d’esquivar.
Exemples i material de consulta
En aquesta activitat del catàleg de robòtica teniu un exemple de com programar el robot Dash :


El sensor de llum
Per començar, mireu de respondre aquestes preguntes:
🔎 El robot té sensor de llum?
🔎 Si en té, on és?
🔎 Com funciona?
🔎 Com es programa?

Què necessiteu?
La missió la fareu a terra, amb el robot Edison. Poseu a terra:
✅ Un objecte que faci de nau, és a dir, objectiu de la missió. Fixeu-lo amb cinta adhesiva.
✅ El robot Edison.
✅ Alguns obstacles que impedeixin arribar a la nau seguint una única línia recta.
✅ Necessitareu també una llanterna o un focus de llum.
Programació del robot
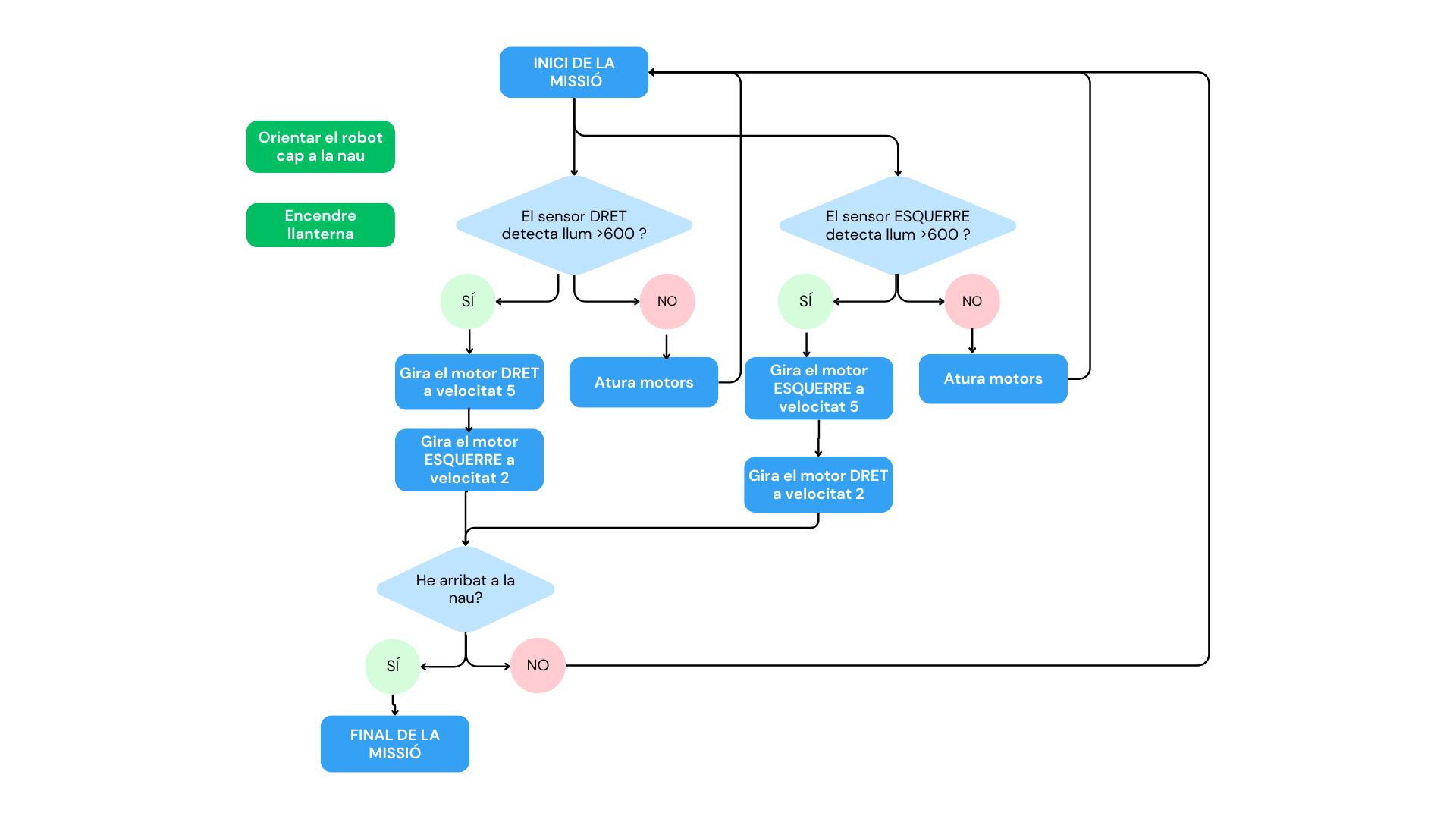
El robot Edison té dos sensors de llum que recullen les dades de la intensitat de la llum amb valors entre 0 (mínim) i 1023 (màxim). Aquests sensors estan situats a la part frontal dreta i esquerra del robot.
Orientareu el robot cap a la nau sense moure’l de lloc i, amb una llanterna, il·luminareu els sensors de llum del robot.
Per programar que el robot avanci cap endavant, ho podeu fer amb el comparador “and” dels blocs d’operadors. Aquest comparador obliga a que es compleixin dues condicions: que els dos sensors estiguin rebent la mateixa llum per avançar en línia recta.
Si el robot no detecta la llum de la llanterna, caldrà aturar els motors.
🔸Com fer girar el robot?
Podem fer que el robot giri cap on ve la llum. Quan el sensor dret detecti llum, farà que el robot giri cap a la dreta, i si la rep per l’esquerra, girarà a l’esquerra. Aquesta part és opcional en el repte.
Per fer un gir a la dreta, haurem de moure més de pressa el motor de l’esquerra i més a poc a poc el motor de la dreta. Si ho fem a la inversa, el robot girarà cap a l’esquerra. En l’activitat d’exemple que us enllacem al final, podeu veure el codi que es fa servir per programar aquests moviments.
Diagrama de flux
En verd, les vostres accions.
En blau, les accions i decisions del robot.
Blocs recomanats
A continuació us donem algunes idees sobre els blocs de programació d’Edison que podeu d’utilitzar
👉🏾 Esdeveniments (per començar):
👉🏾 Acció (per moure’s endavant): 
👉🏾 Control (per repetir o prendre decisions): 
👉🏾 Operadors (per comparar nombres): ![]()
👉🏾 Sensors (per detectar llum o color): 
Recomanacions
Abans de començar, és important que mesureu el valor de la llum a l’aula. Si la il·luminació és massa intensa, es recomana que abaixeu les persianes o apagueu els llums per obtenir mesures més precises.
El valor del sensor de llum que s’ha emprat en l’exemple del catàleg d’activitats és de 600. Podeu variar aquest valor per ajustar-ho a la llum que arriba al robot. Per a un bon funcionament, es recomana fer servir un focus de llum potent i apropar-lo molt als sensors del robot.
Exemples i material de consulta
En aquesta activitat del catàleg de robòtica teniu un exemple de com programar el robot Edison:


Introducció al repte
Per començar, mireu la presentació que us ajudarà a conèixer el robot Codey Rocky i com programar-lo per superar aquest repte:

Què necessiteu?
La missió la fareu a terra, amb el robot Codey Rocky. Poseu a terra:
✅ Un rectangle o cercle de color vermell que faci de nau (és a dir, d’objectiu de la missió). Fixeu-lo amb cinta adhesiva.
✅ El robot codey Rocky.
✅ Alguns obstacles que impedeixin arribar a la nau seguint una única línia recta.
✅ Necessitareu també una llanterna o un focus de llum.
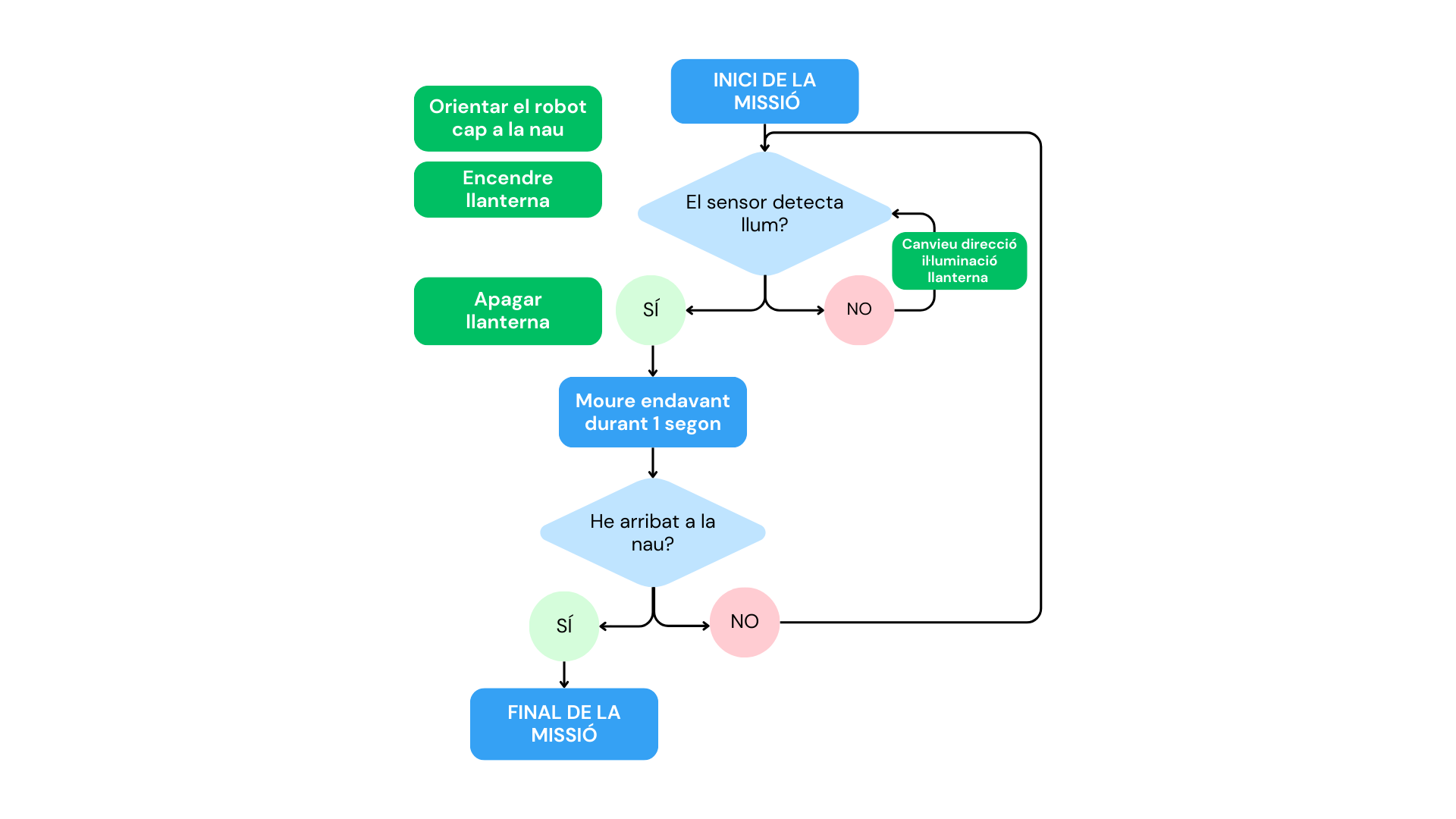
Programació del robot
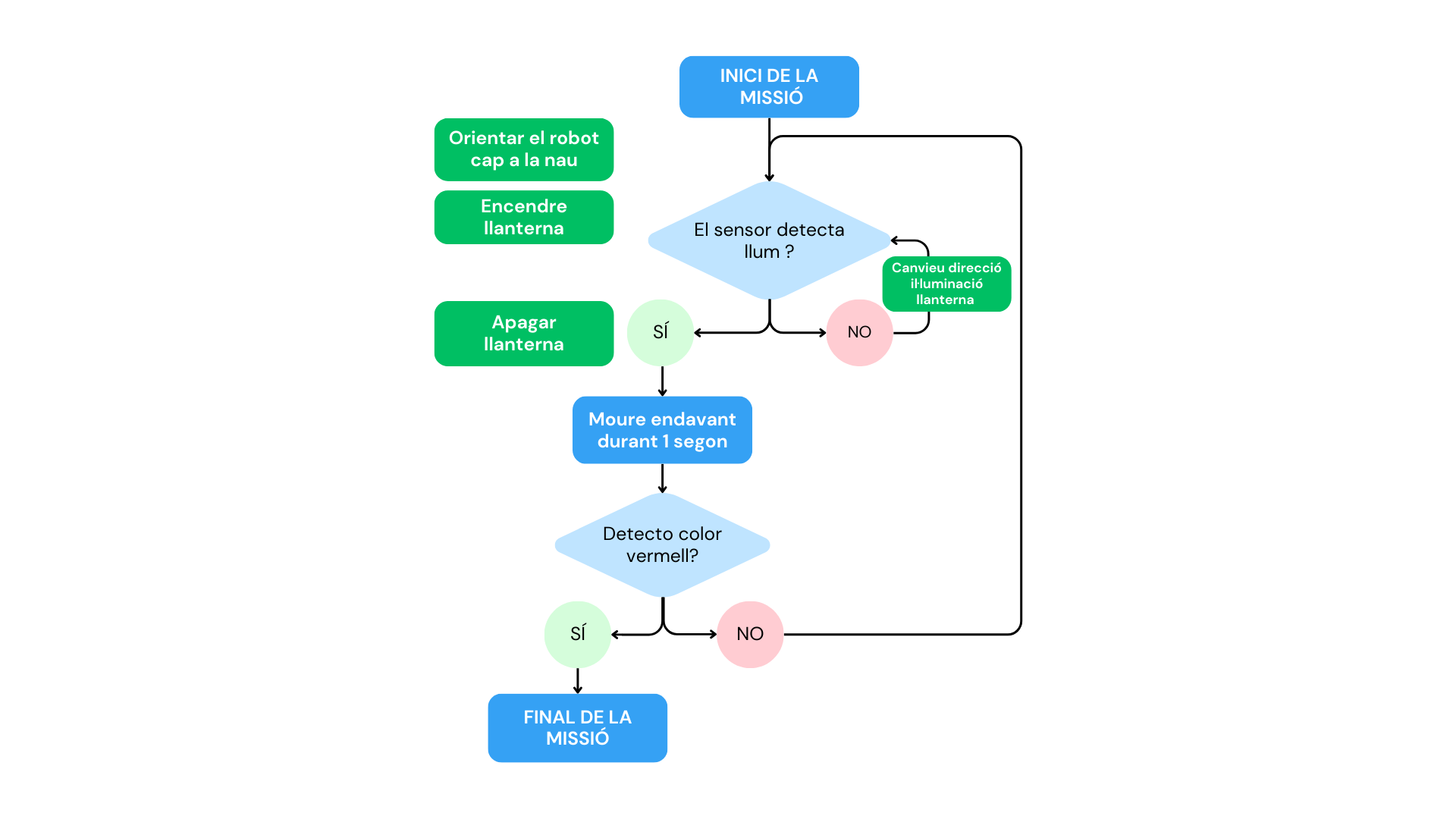
Orientareu el robot sense moure’l de lloc i, amb una llanterna, il·luminareu el sensor de llum del robot. Quan el sensor detecti llum, farà que el robot avanci durant 1 segon cap endavant i s’aturi.
Aquest procediment s’ha de repetir fins que el robot detecti el color vermell del rectangle o del cercle i completi la missió.
Diagrama de flux
En verd hi ha indicacions del que heu de fer entre un punt de decisió i un altre.
En blau, les decisions que ha de prendre el robot abans de seguir endavant amb la missió.
🔸Blocs recomanats
A continuació us oferim algunes propostes sobre els blocs de programació de mBlock que podeu utilitzar:
👉🏾 Esdeveniments (per començar):
👉🏾 Acció (per moure’s endavant): ![]()
👉🏾 Control (per repetir o prendre decisions): 
👉🏾 Operadors (per comparar nombres): ![]()
👉🏾 Sensors (per detectar llum o color):
![]()
🔸Recomanacions
Abans de començar, és important que mesureu el valor de la llum a l’aula. Si la il·luminació és massa intensa, abaixeu les persianes o apagueu els llums per obtenir mesures més precises.
🔸Millores del programa
- Feu que el robot celebri l’èxit de la missió.
- Afegiu expressió a la cara del Codey Rocky.
- Afegiu efectes sonors.
Exemples i material de consulta
En aquesta activitat del catàleg de robòtica teniu un exemple de com programar el robot Codey Rocky :


Què necessiteu?
La missió la fareu a terra, amb el robot mBot2. Poseu a terra:
✅ Un objecte que faci de nau (és a dir, d’objectiu de la missió). Fixeu-lo amb cinta adhesiva.
✅ El robot mBot 2.
✅ Alguns obstacles que impedeixin arribar a la nau seguint una única línia recta.
✅ Necessitareu també una llanterna o un focus de llum.
Programació del robot
Orientareu el robot sense moure’l de lloc i, amb una llanterna, il·luminareu el sensor de llum del robot. Quan el sensor detecti llum, farà que el robot avanci durant 1 segon cap endavant i s’aturi. Aquest procediment s’ha de repetir fins que el robot arribi a la nau i completi la missió.
Recomanacions
Abans de començar, caldrà que observeu el valor de la llum que teniu a l’aula. Si hi ha molta llum, s’aconsella que abaixeu les persianes o apagueu els llums.
El sensor de llum del mBot es troba a la Ciber Py. Caldrà que la il·lumineu directament amb una llanterna. Per saber quin és el valor de la llum quan s’il·lumina amb la llanterna, podeu fer servir aquests blocs per programar la CiberPy:

Fent servir aquest bloc, podreu establir el valor de la llum quan s’il·lumina el sensor amb la llanterna.
Diagrama de flux
En verd, les vostres accions.
En blau, les accions i decisions del robot.
Blocs recomanats
A continuació us oferim algunes idees sobre els blocs de programació de mBlock que podeu d’utilitzar:
👉🏾 Esdeveniments (per començar):![]()
👉🏾Acció (per moure’s endavant): ![]()
👉🏾Control (per repetir o prendre decisions): 
👉🏾Control (per repetir accions):
👉🏾 Operadors (per comparar nombres): ![]()
👉🏾 Detecció (per detectar llum o color): ![]()
👉🏾Moviment (per moure el robot):
![]()
👉🏾 Mostra (per mostrar dades per la pantalla): ![]()
Recomanacions
Abans de començar, és important mesurar el valor de la llum que arriba al robot amb les condicions de l’aula. Si la il·luminació és massa intensa, es recomana que abaixeu les persianes o apagueu els llums per obtenir mesures més precises (per exemple: si amb poca llum la mesura que captem està entorn al 50 podem programar el robot perquè, si li arriba una intensitat superior a 50, es mogui cap endavant).
Podeu variar aquest valor per ajustar-lo a la llum que arriba al robot. Per a un bon funcionament, es recomana fer servir un focus de llum potent i apropar-lo molt al sensors del robot.
🔸Completeu el programa (opcional)
Afegiu més accions al vostre robot, us donem algunes idees:
- Feu que el robot celebri l’èxit de la missió.
- Afegiu missatges quan el robot arribi a la nau.
- Afegiu efectes sonors.
Exemples i material de consulta
En aquesta activitat del catàleg de robòtica teniu un exemple de com programar el robot mBot2:


El repte
En aquest primer repte haureu de guiar el vostre robot fins a la nau utilitzant la llum.
Preparació de la missió
Abans de començar la missió, convé que tingueu molt clar com heu de configurar el sensor de color per poder treballar amb la llum reflectida, consulteu l’apartat anterior Treballem amb el sensor de color.
Què necessiteu?
✅ Material de LEGO (hub, peces de construcció, quatre rodes petites, un motor i un sensor de llum i de color).
✅ Una o dues llanternes o un focus de llum per il·luminar el terra.
✅ Un punt que representi la nau, objectiu de la missió (feu un cercle de color o qualsevol element que vulgueu). Fixeu-lo al terra amb cinta adhesiva.
⚠️ És important que utilitzeu una font de llum 🔦 que tingui força intensitat.
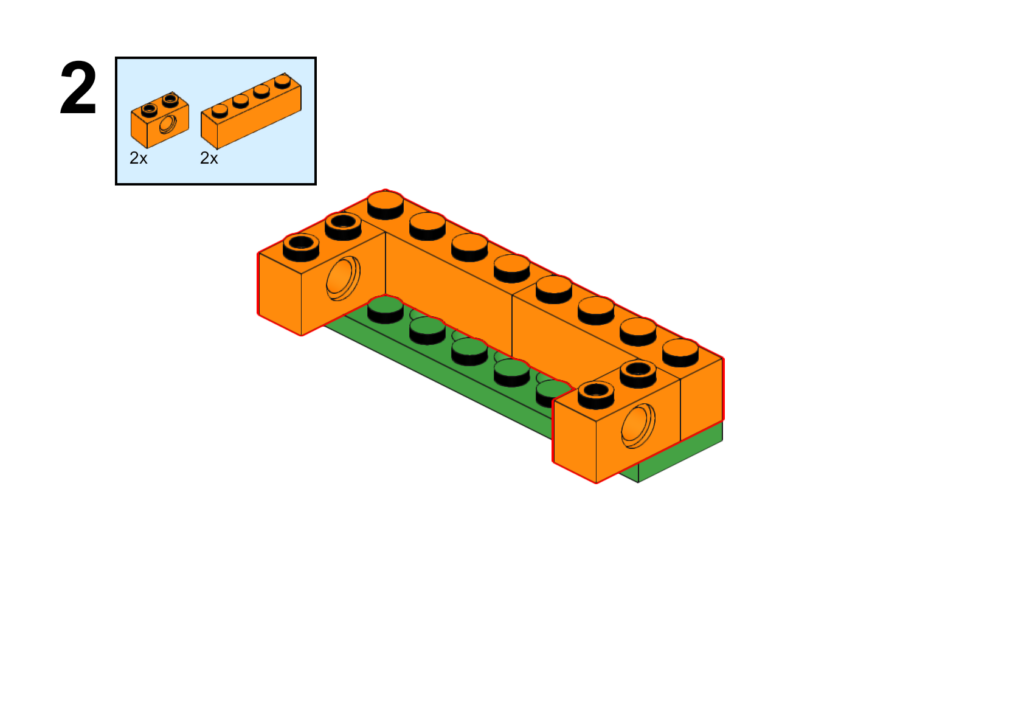
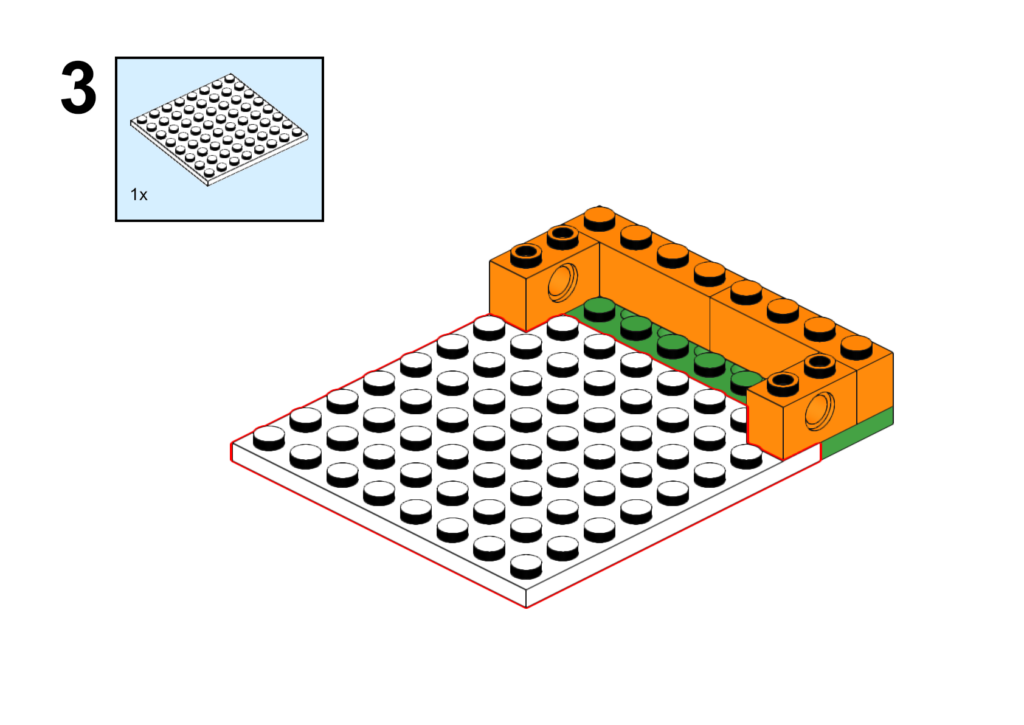
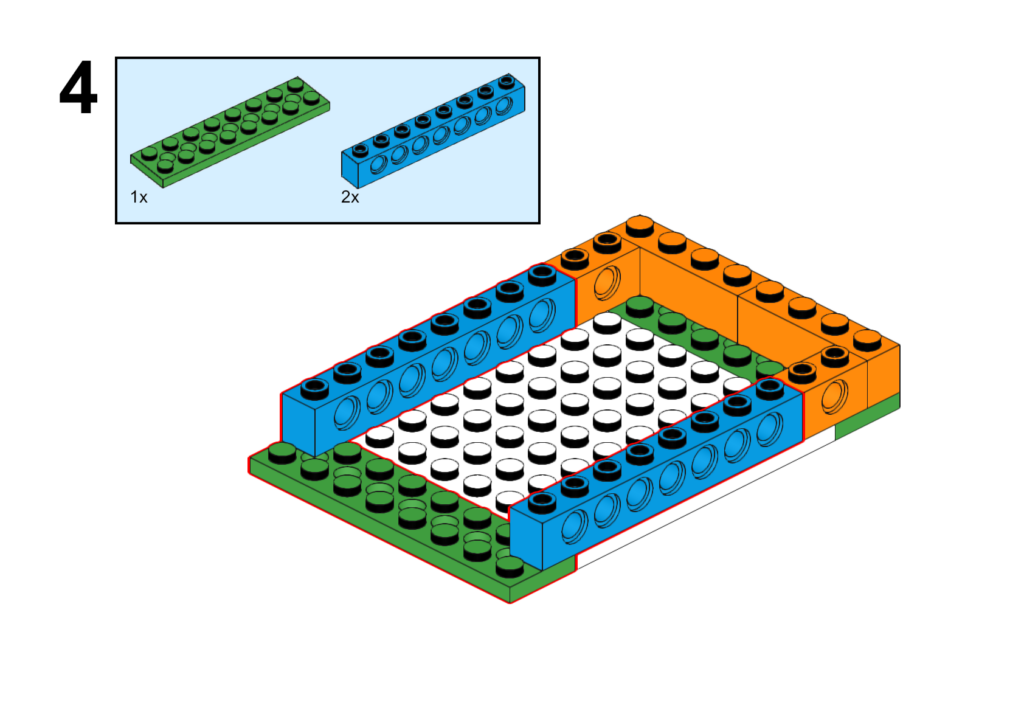
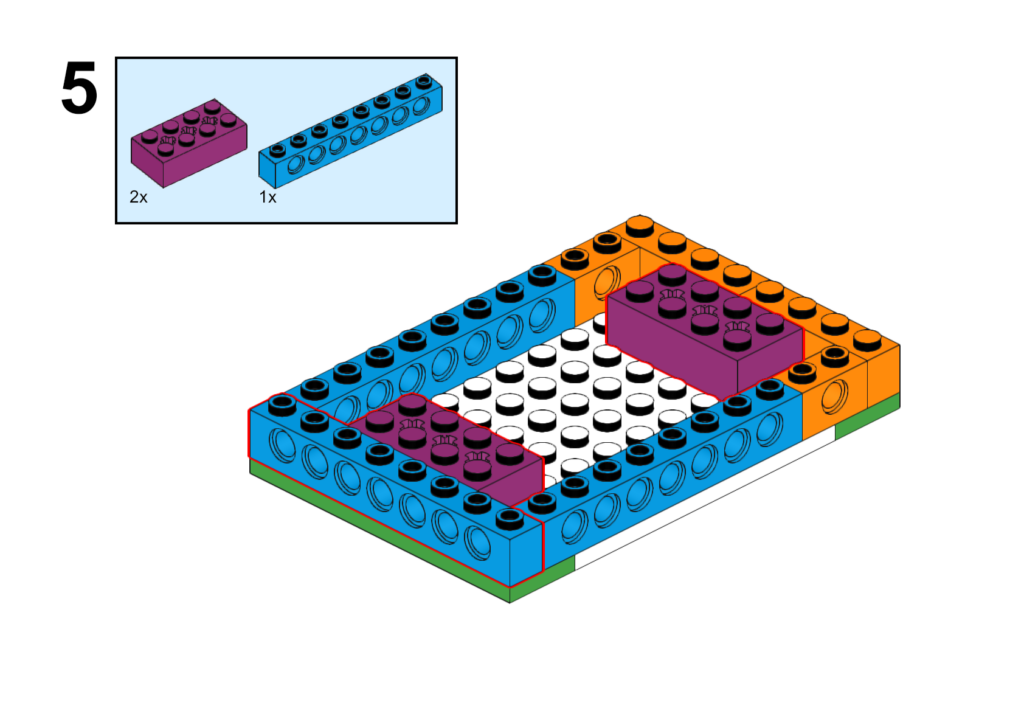
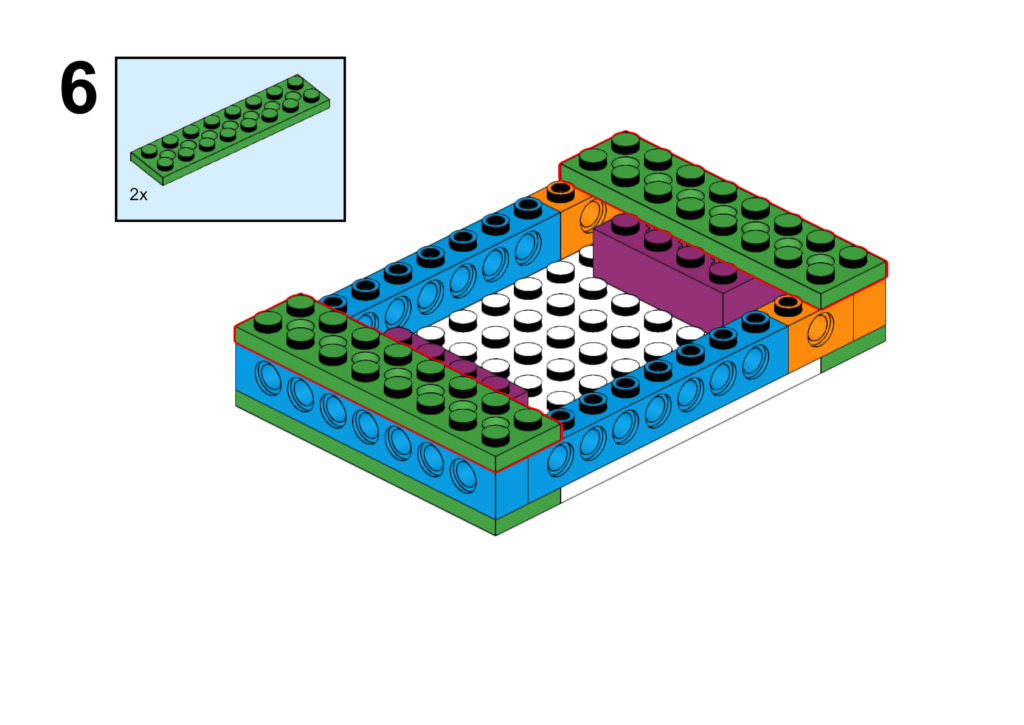
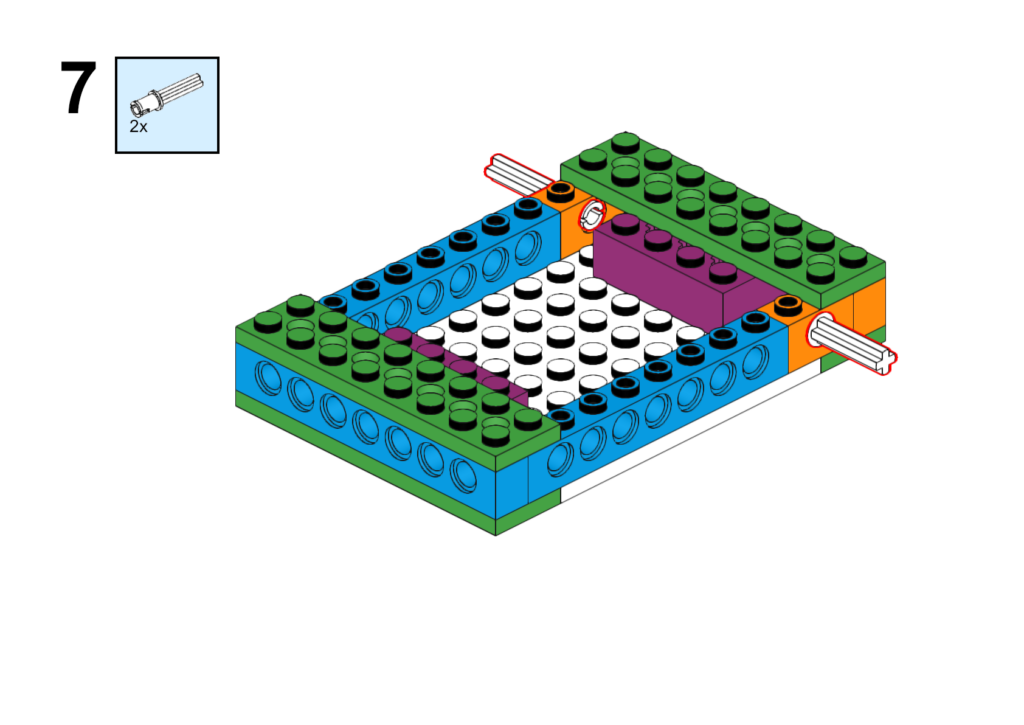
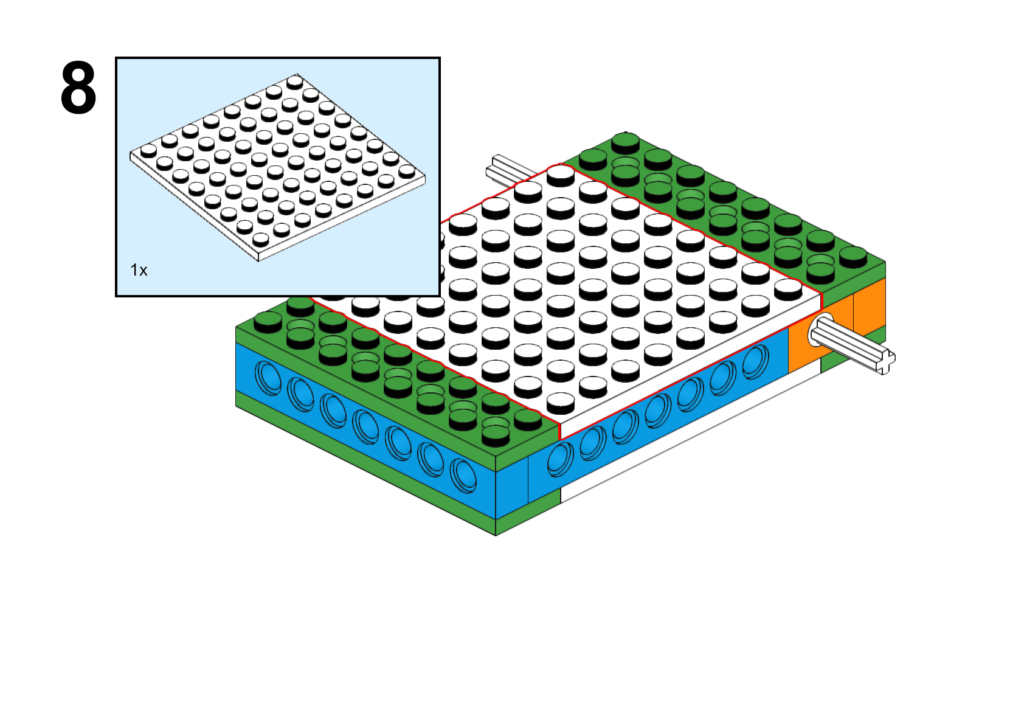
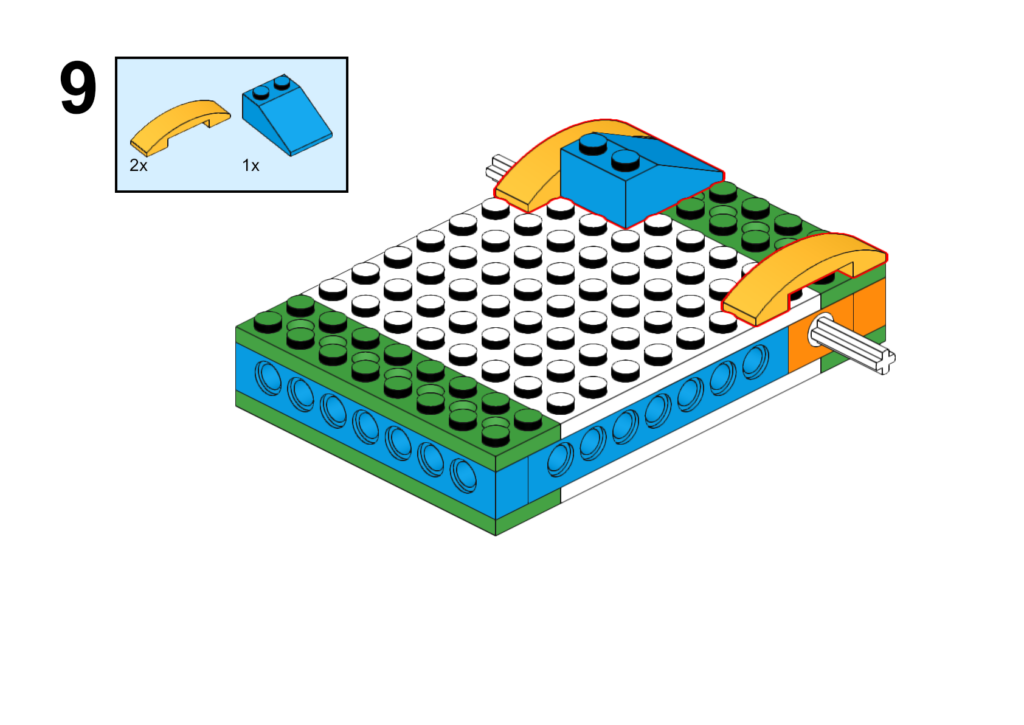
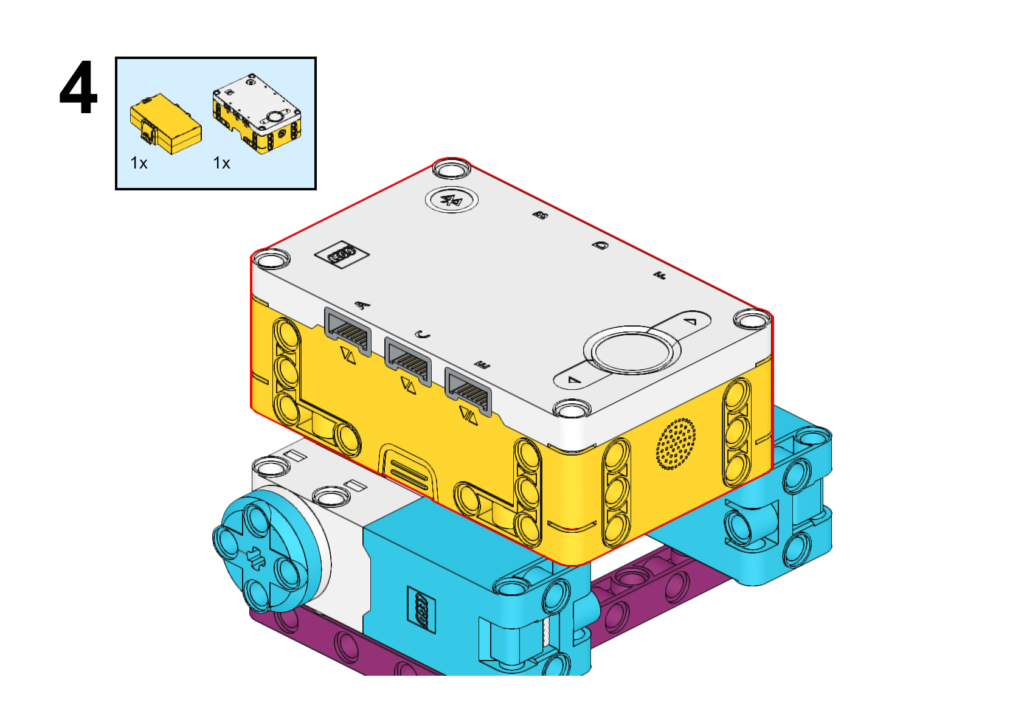
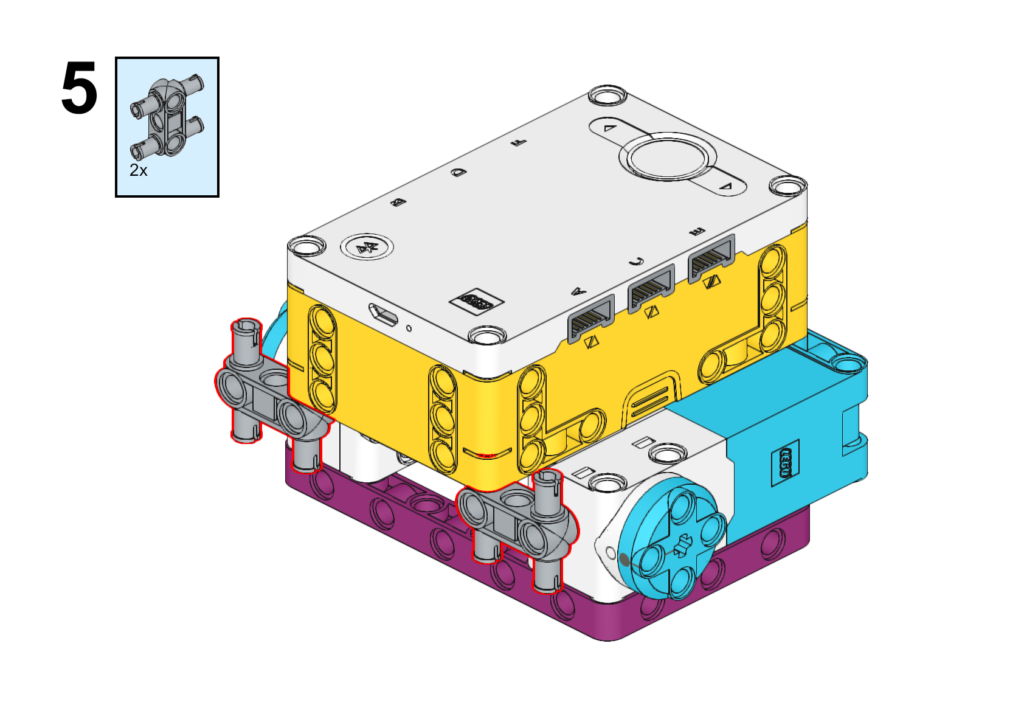
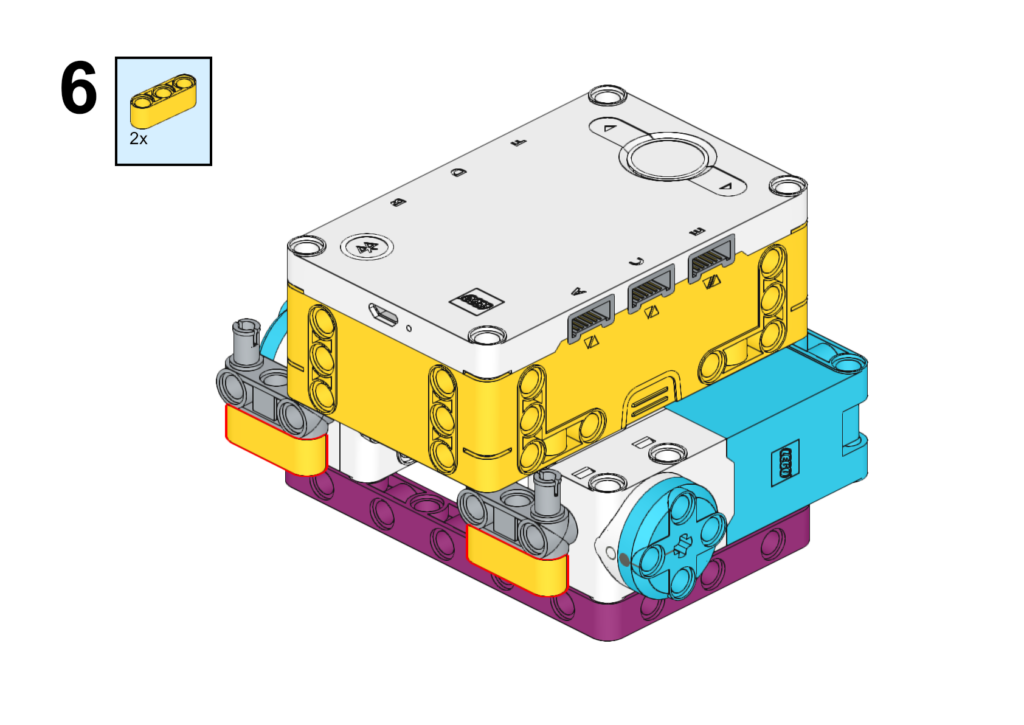
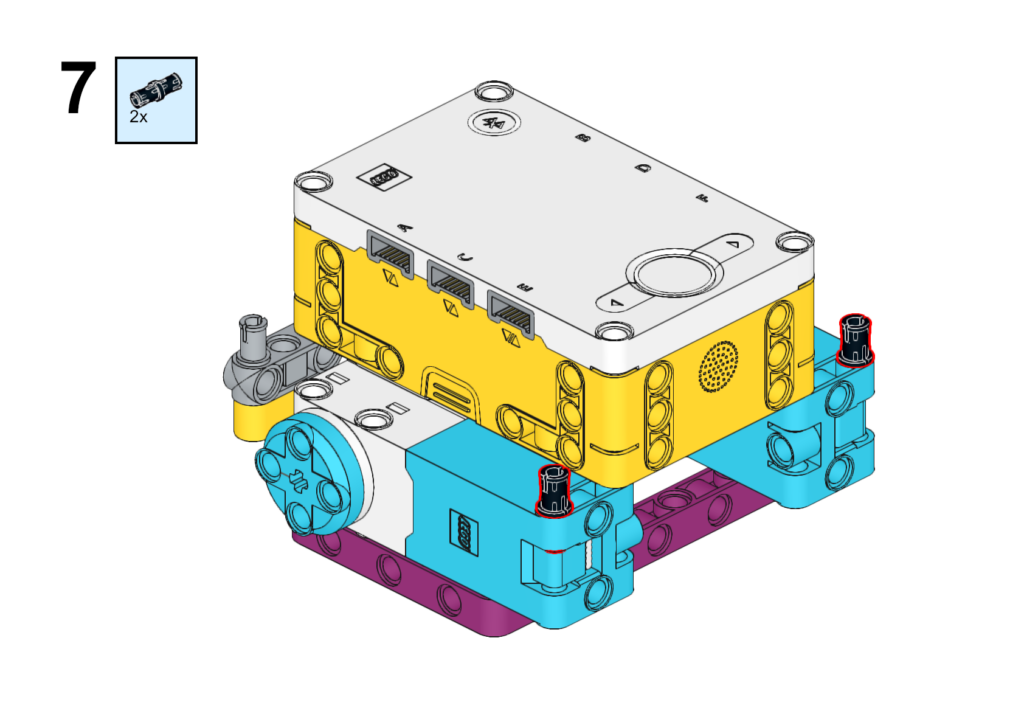
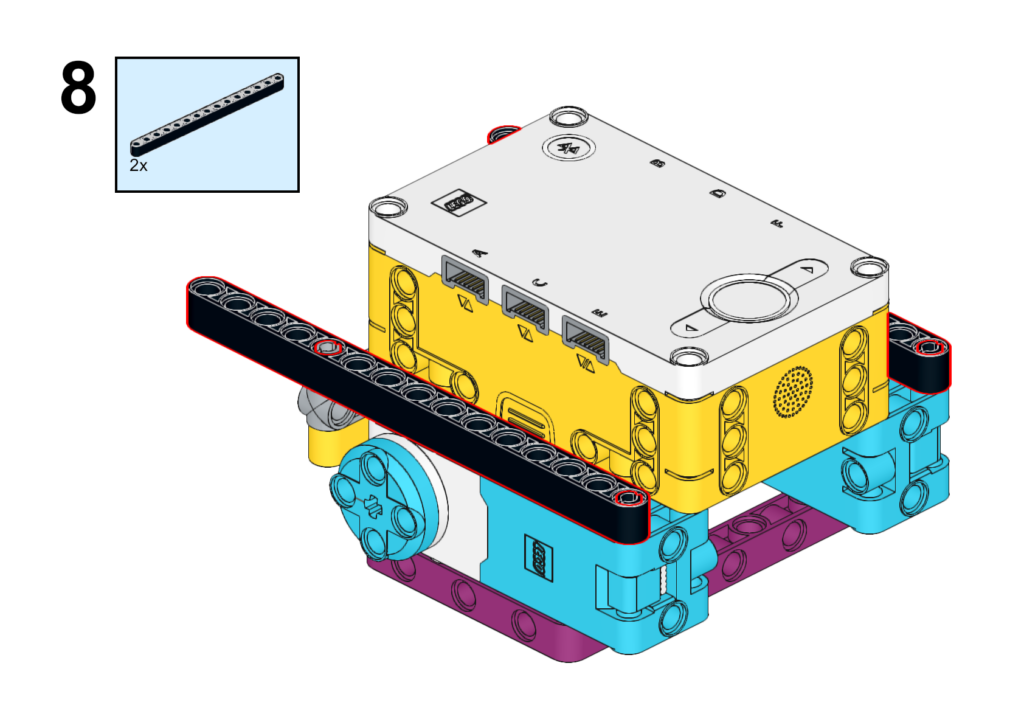
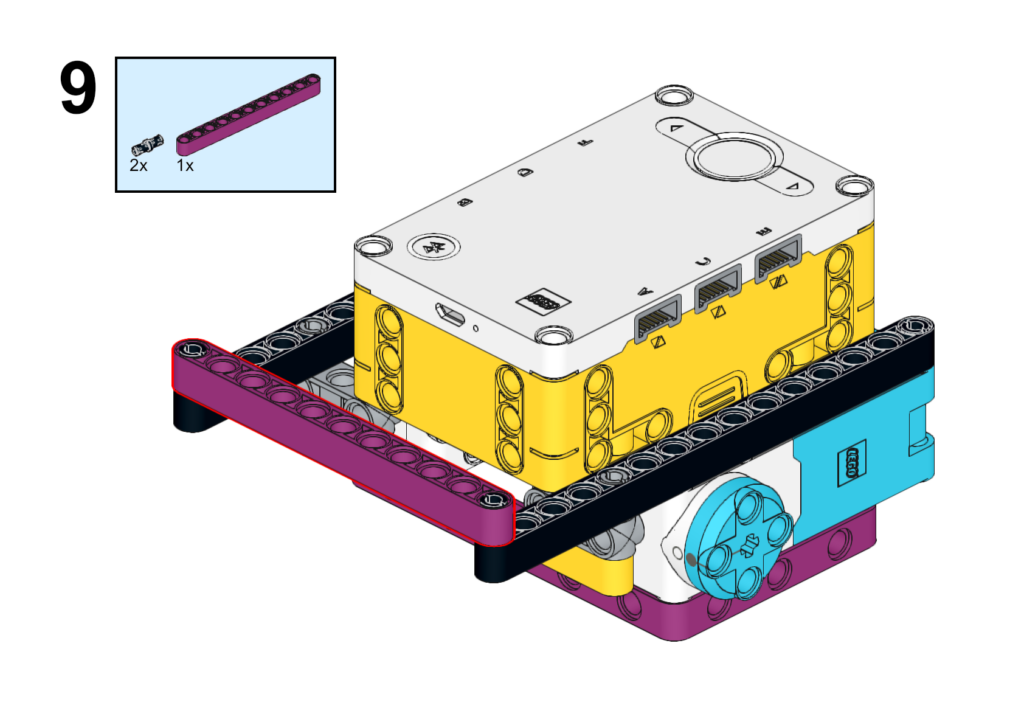
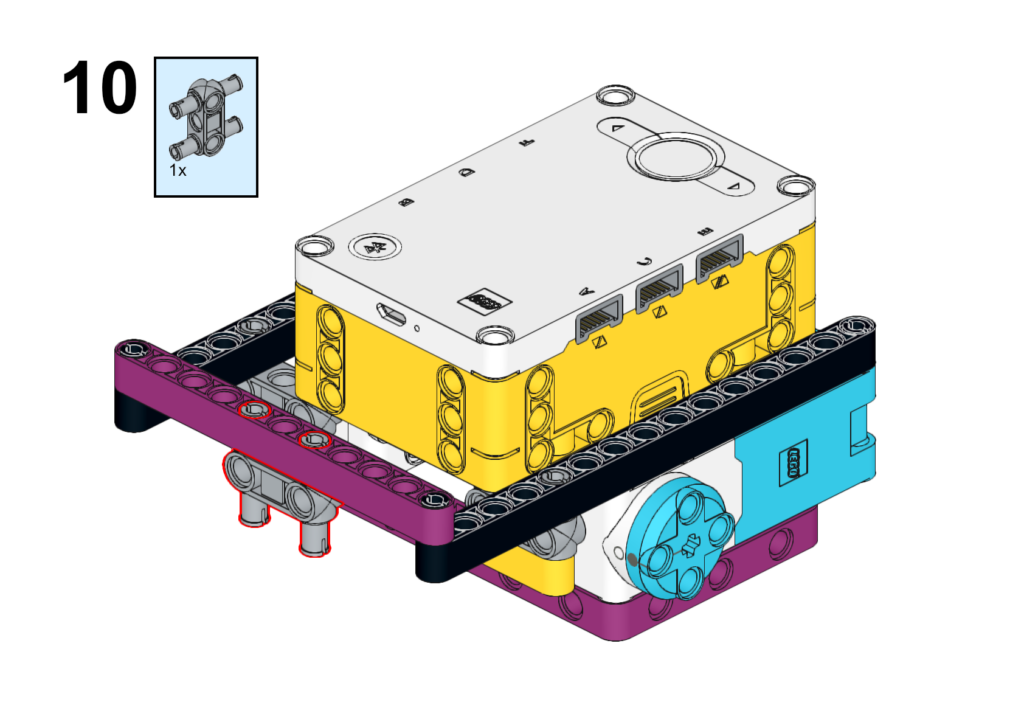
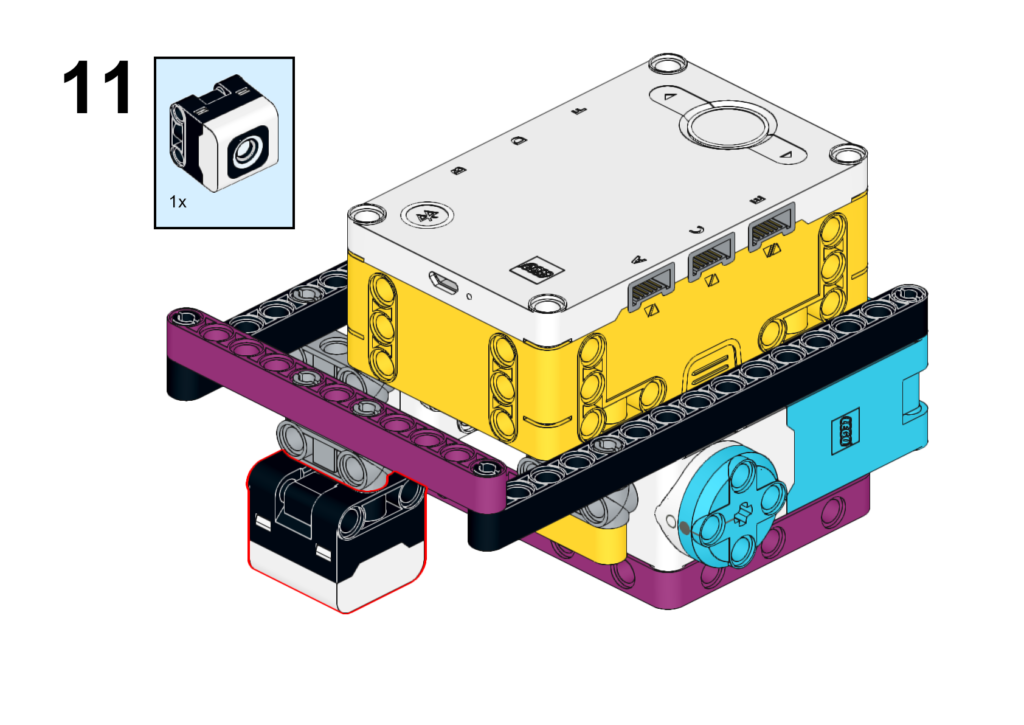
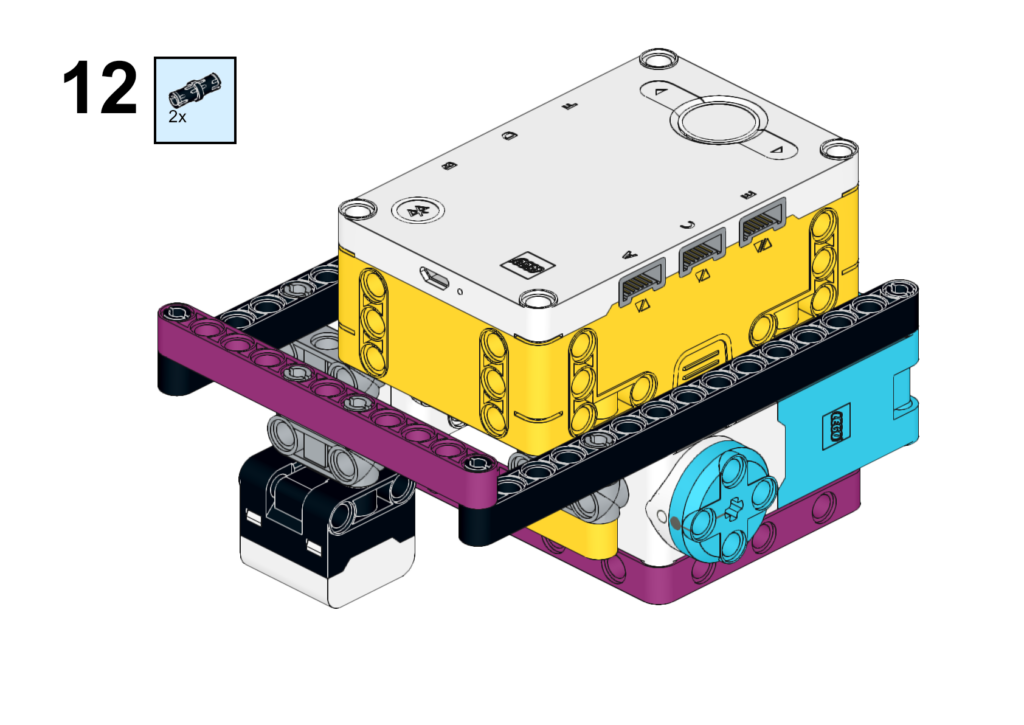
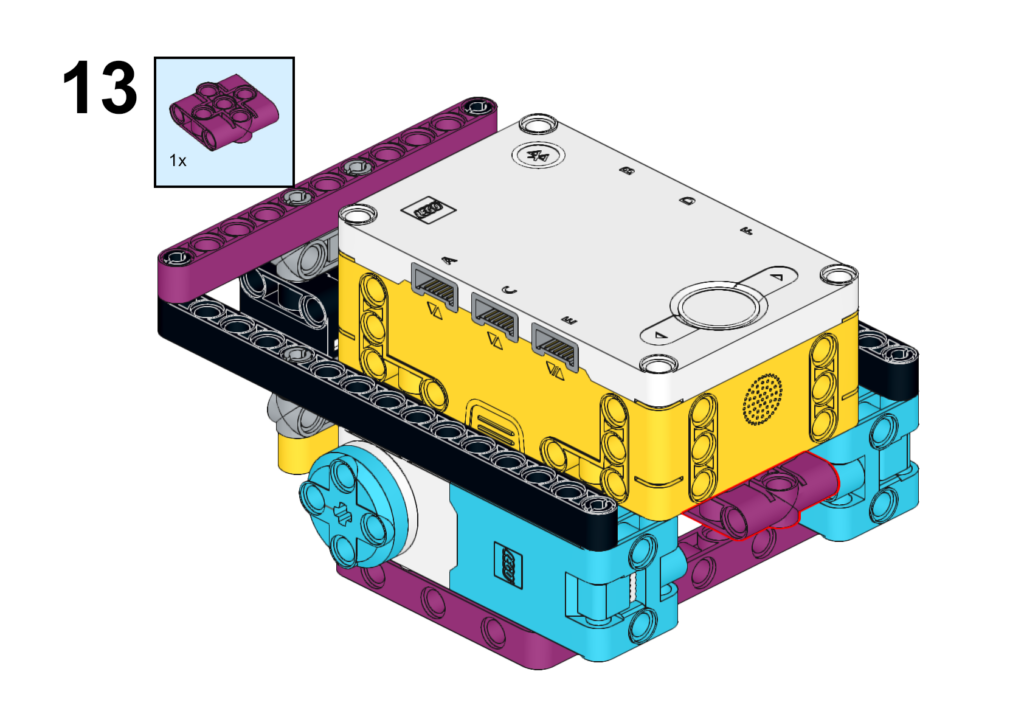
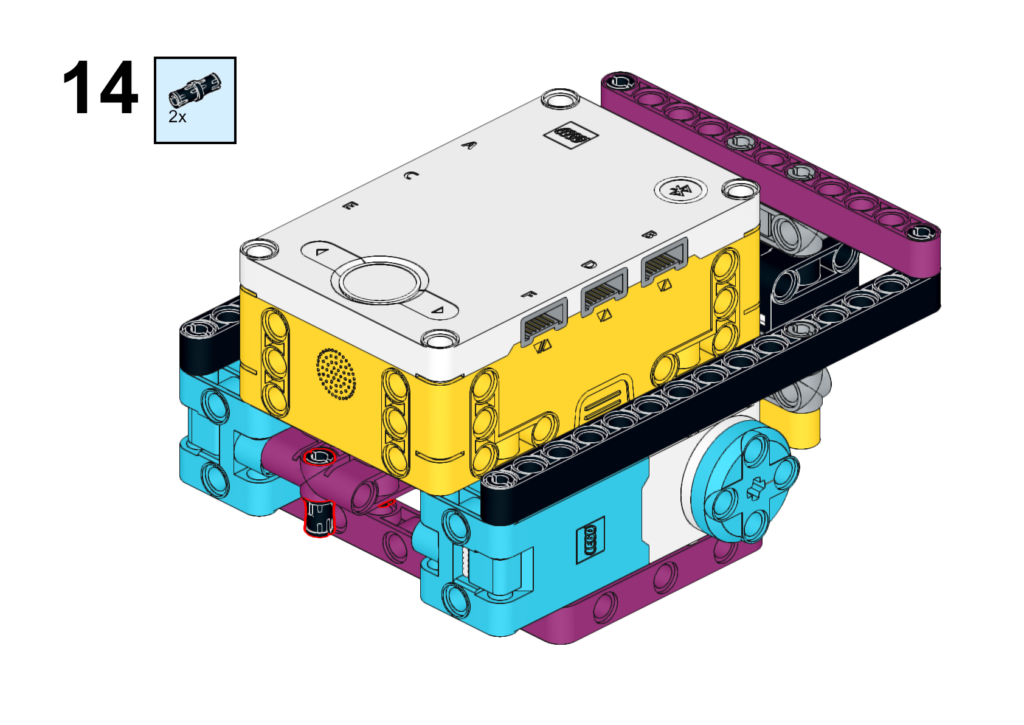
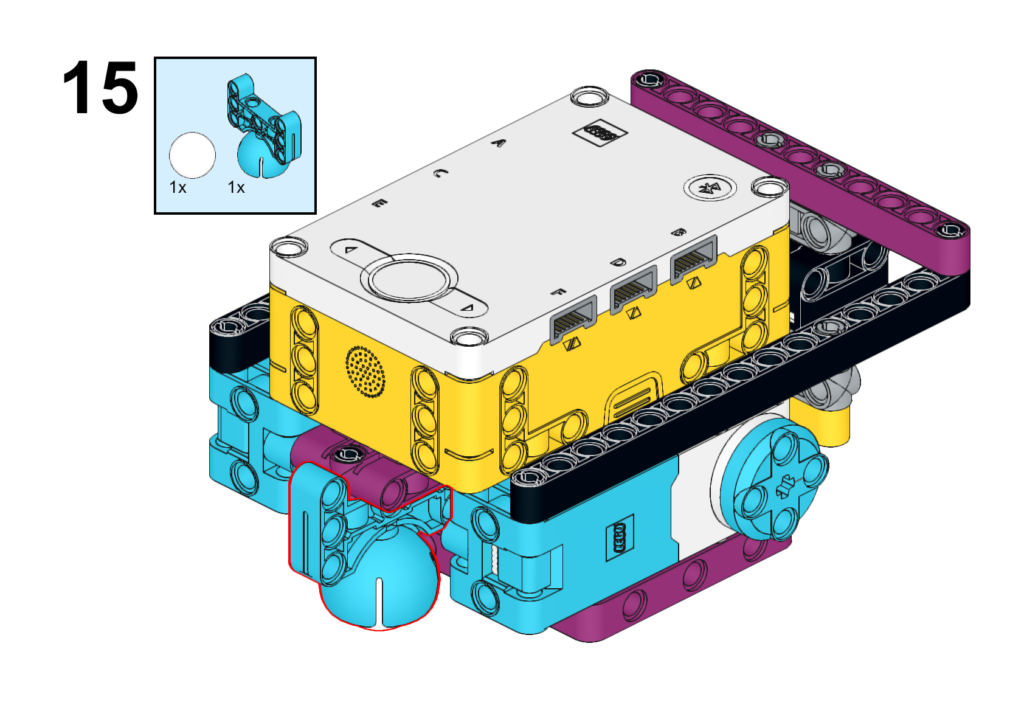
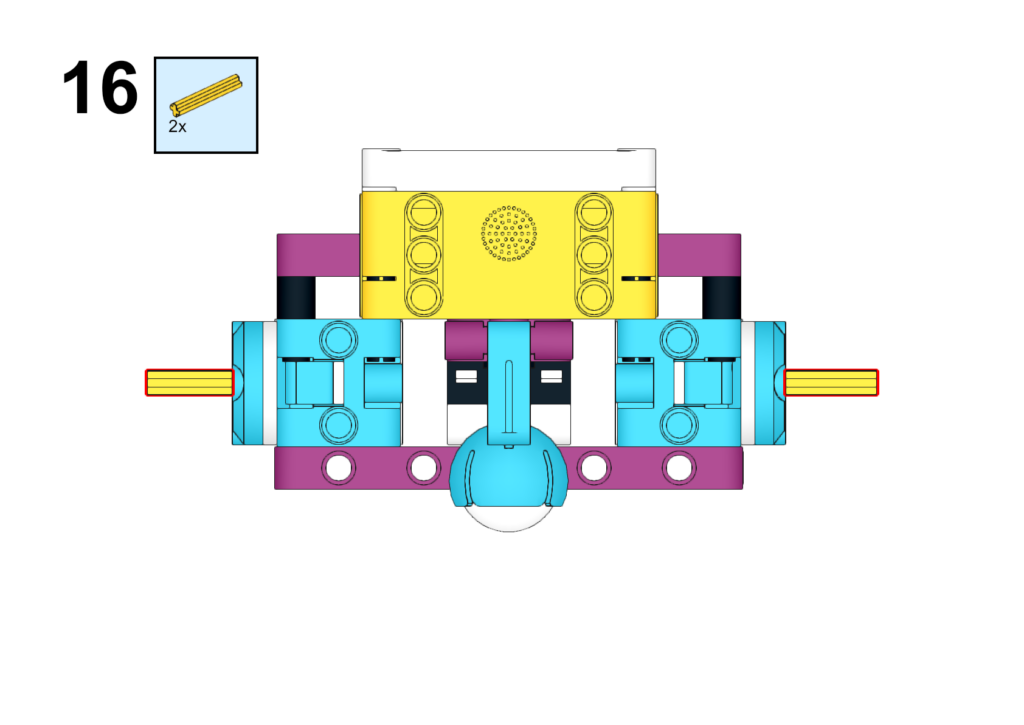
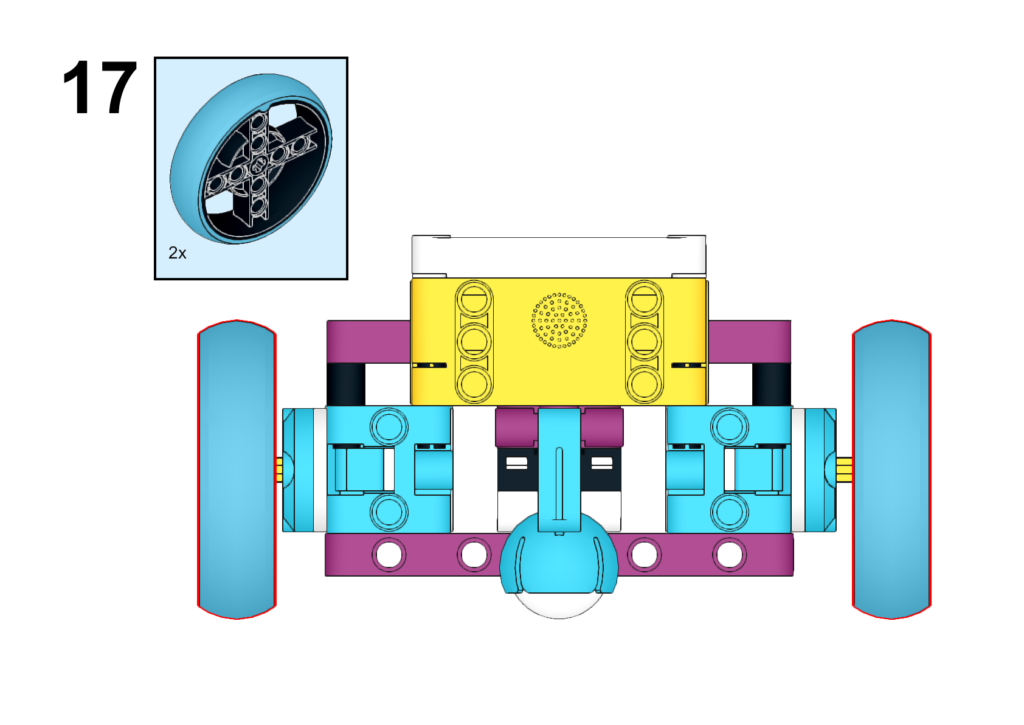
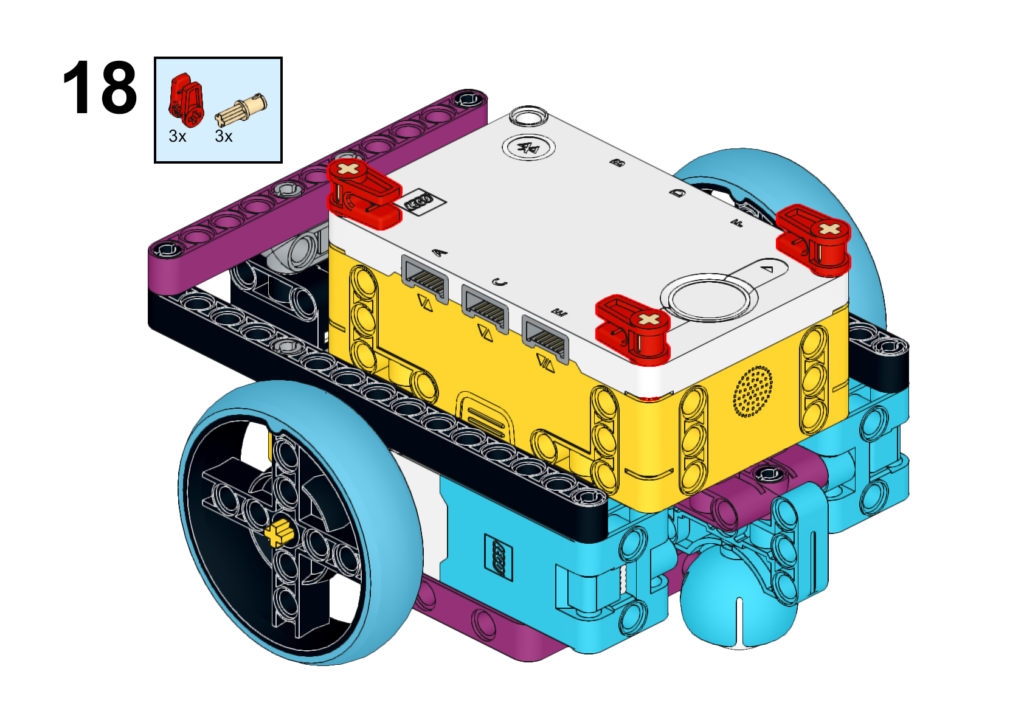
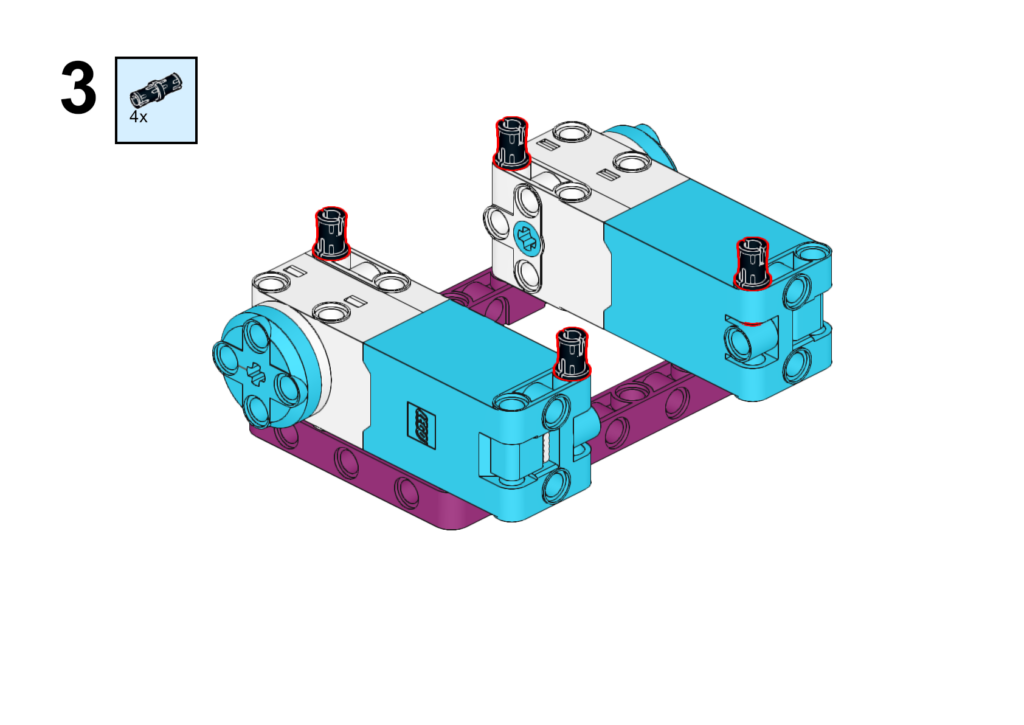
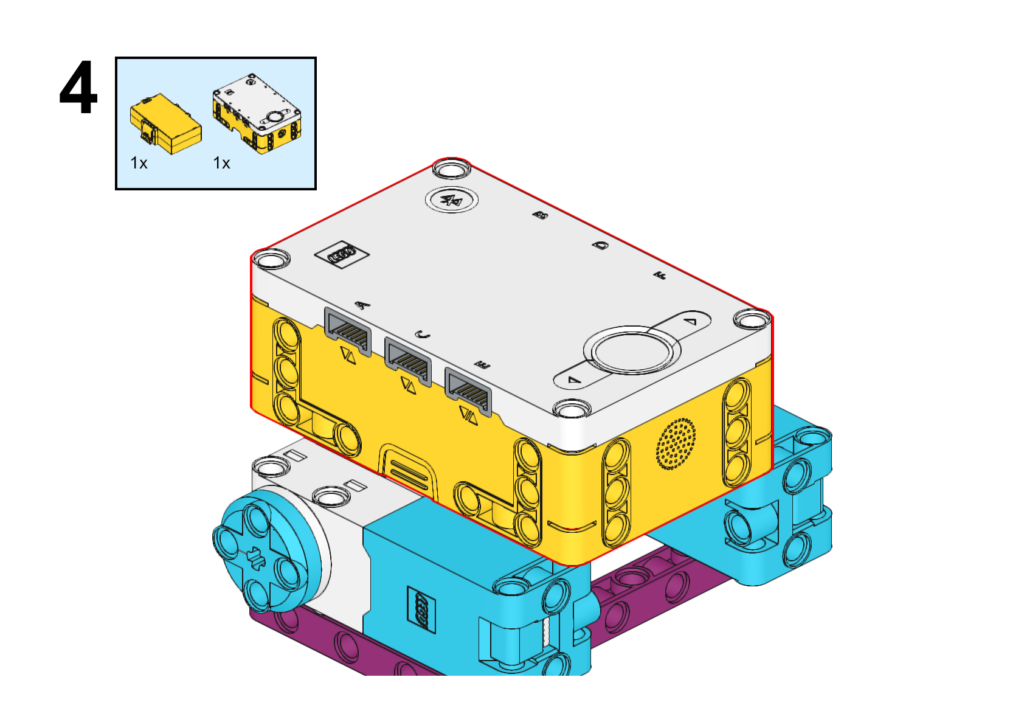
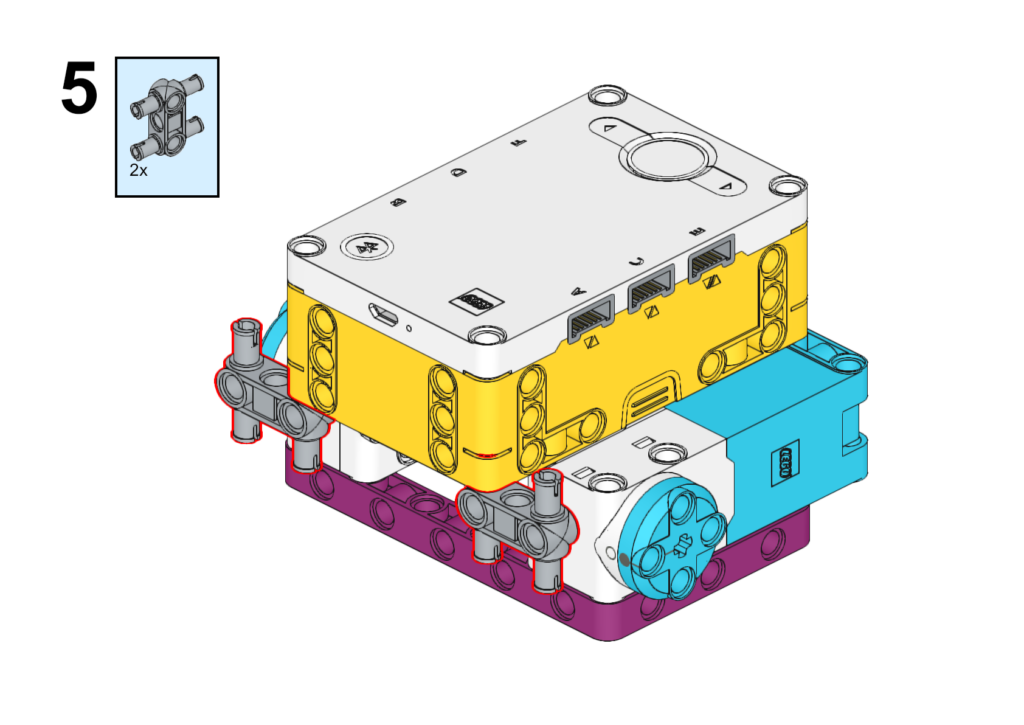
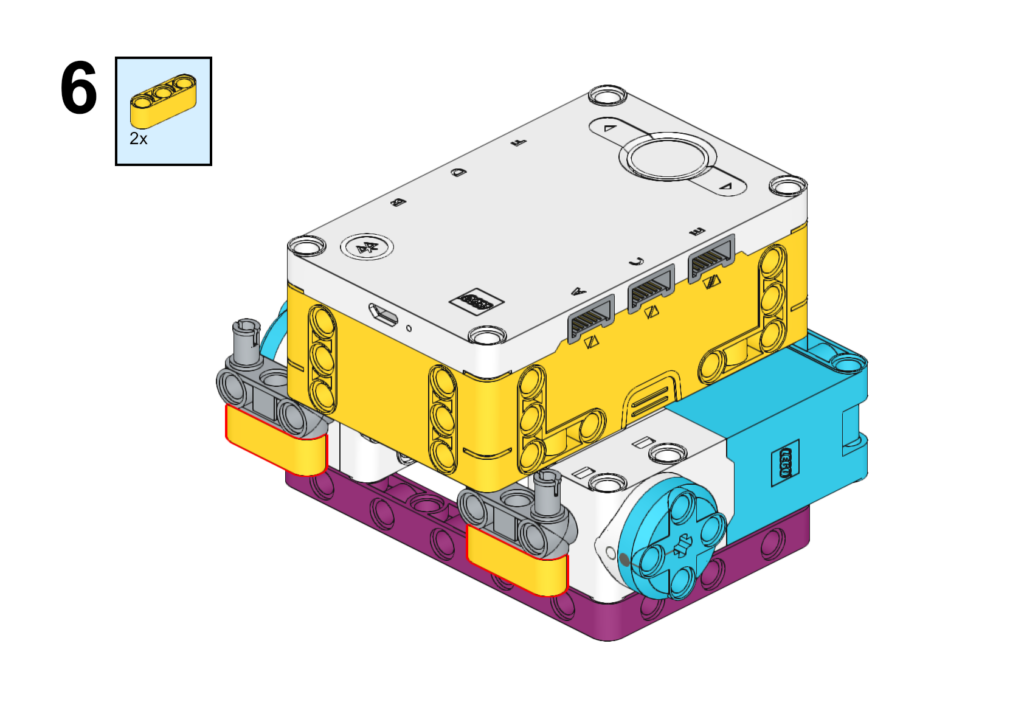
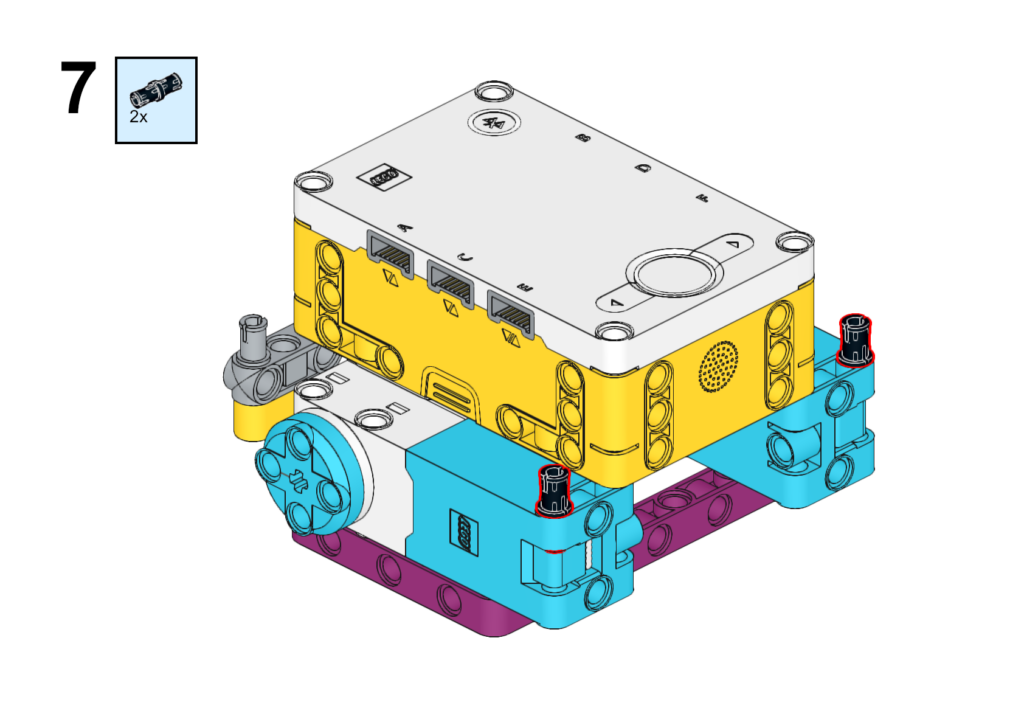
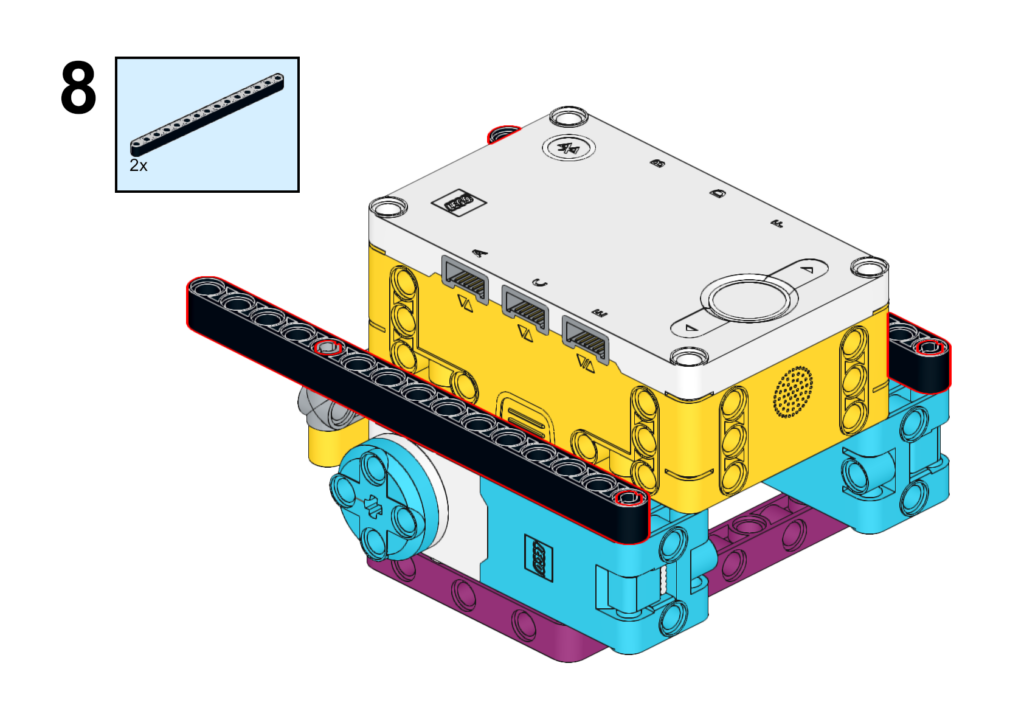
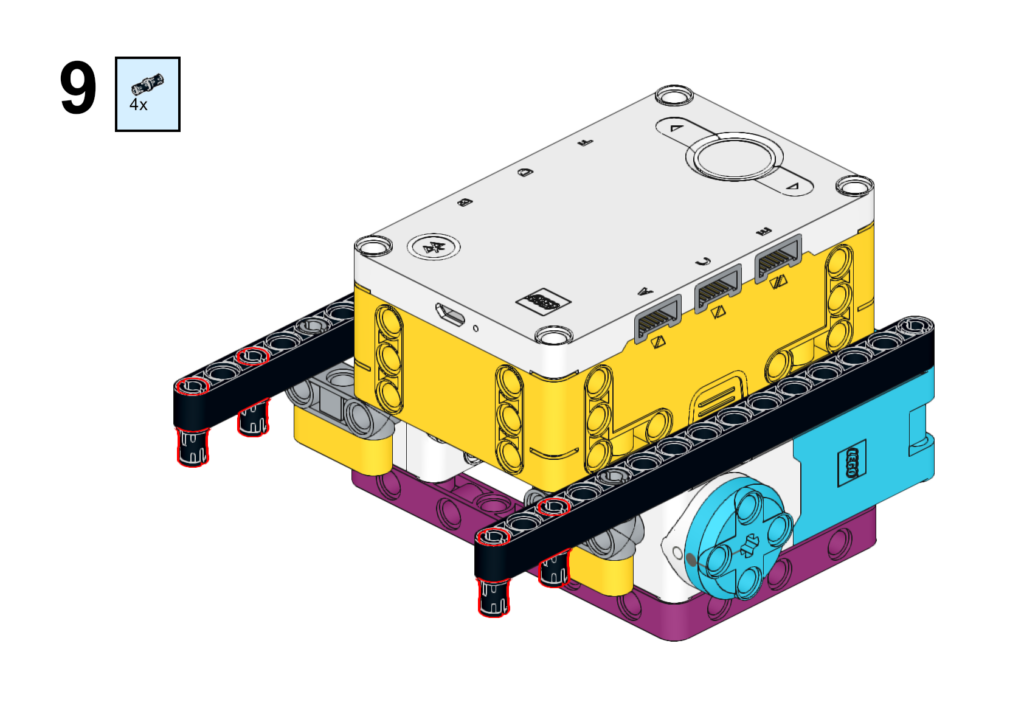
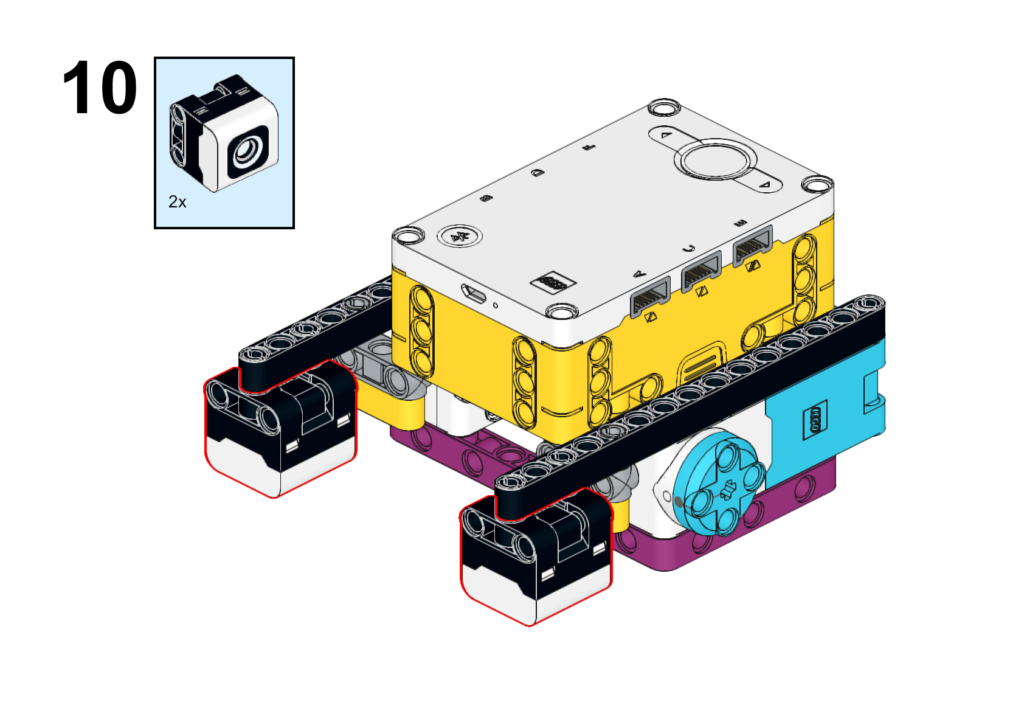
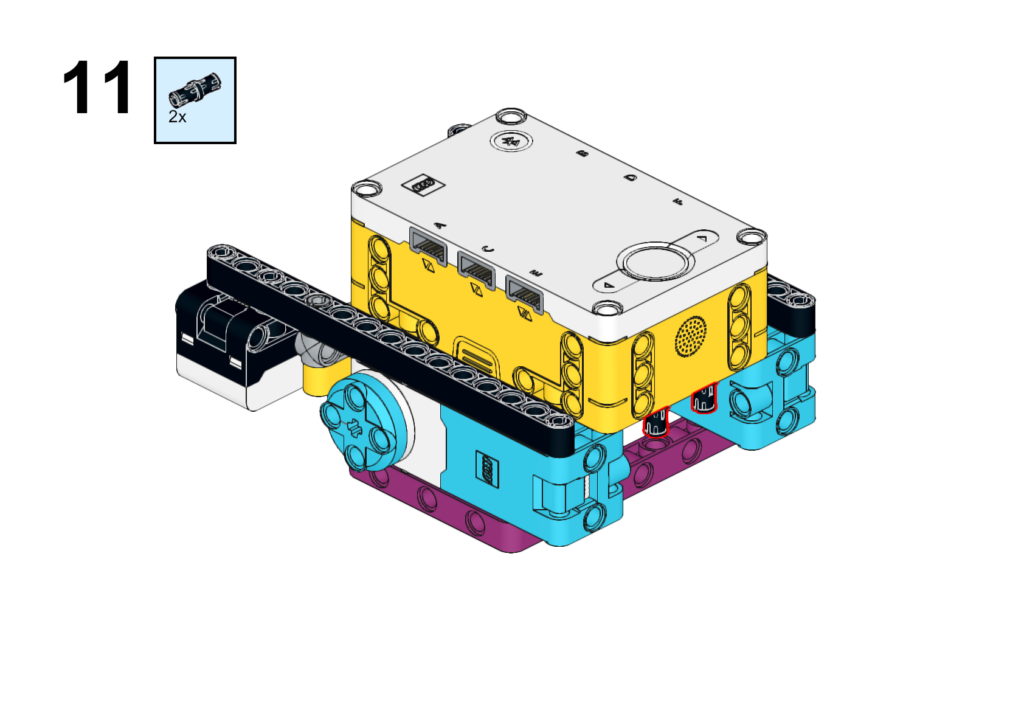
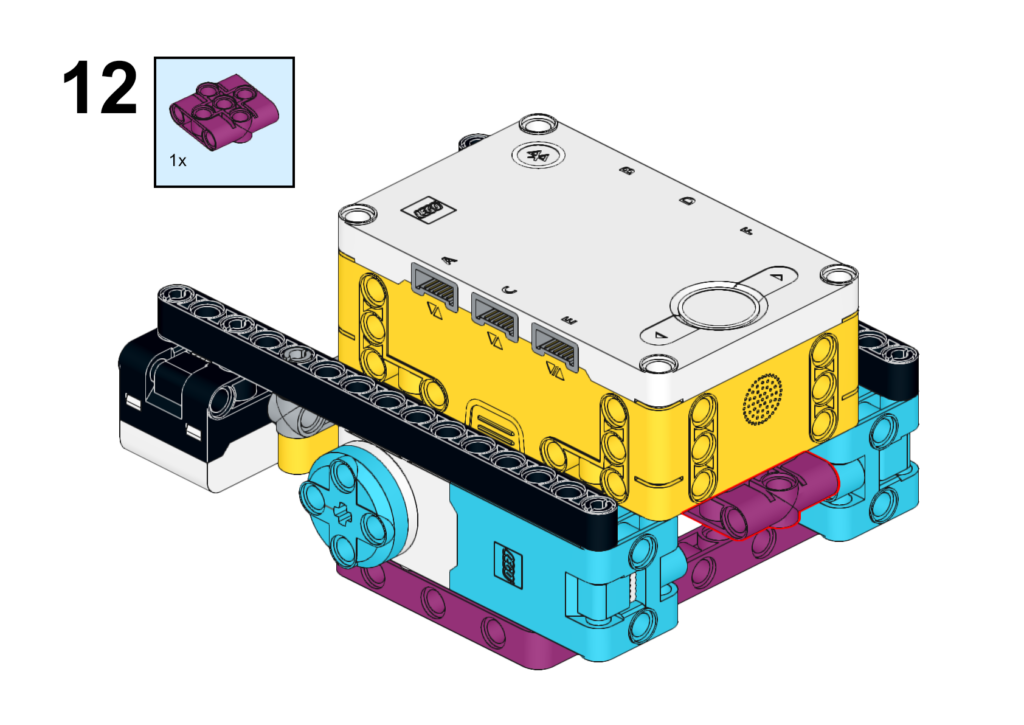
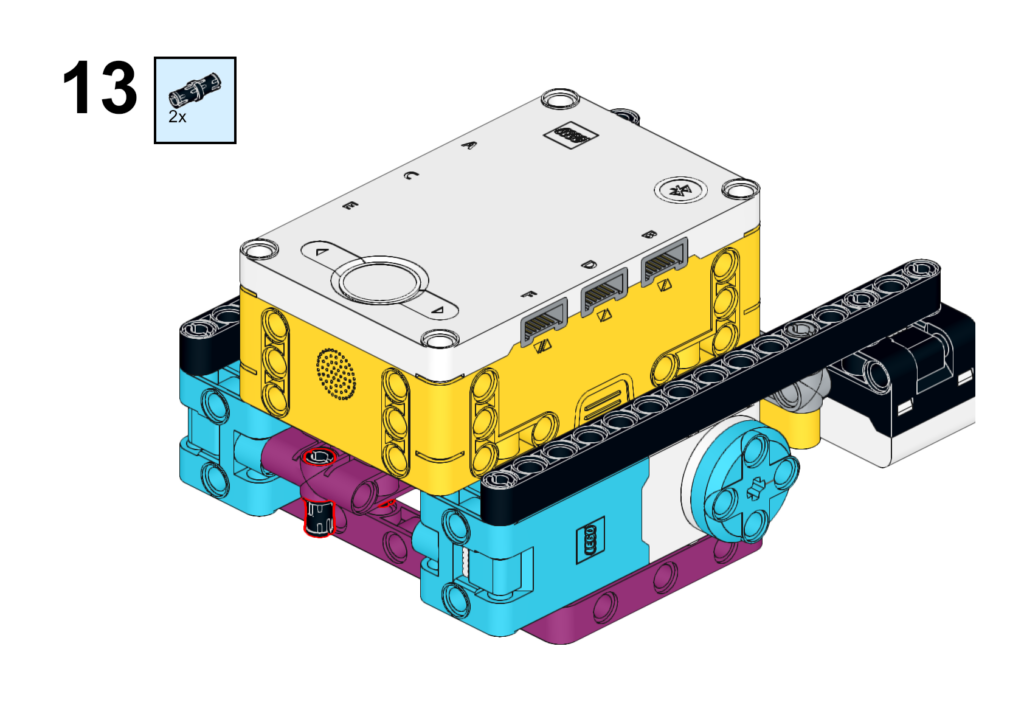
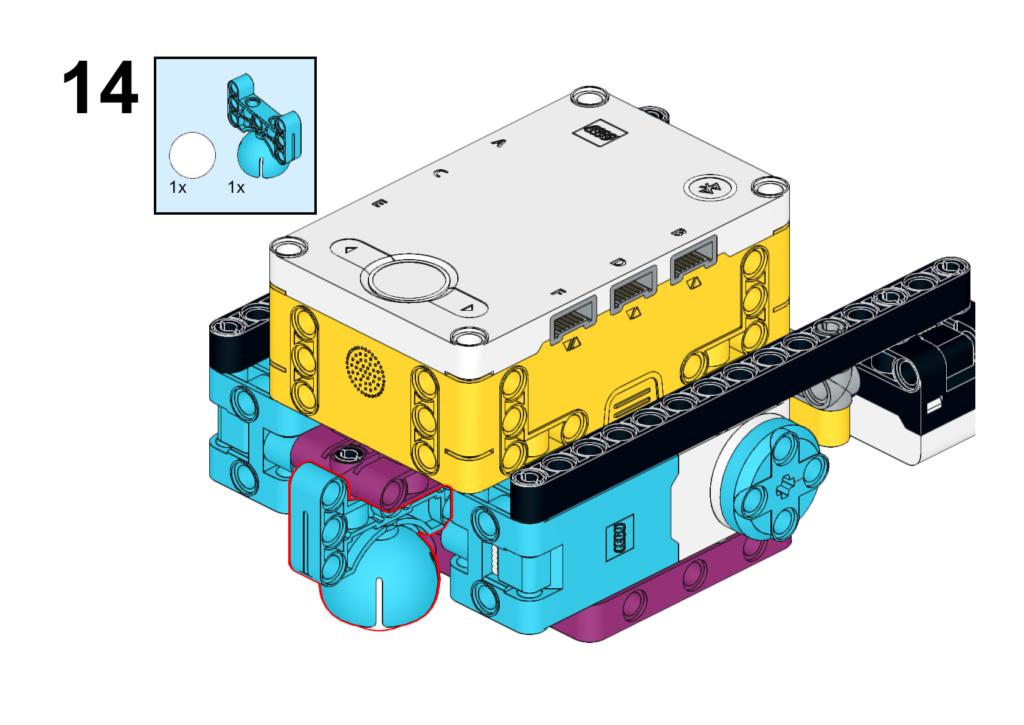
Construcció del robot
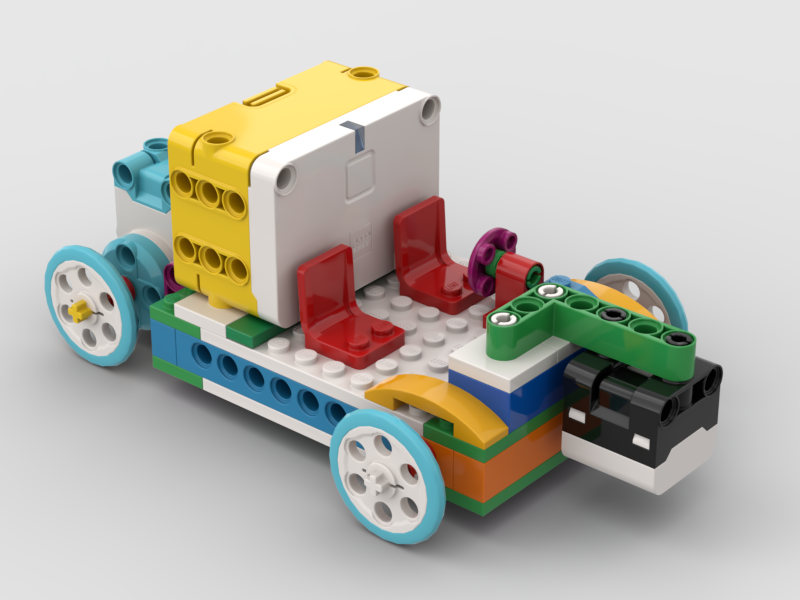
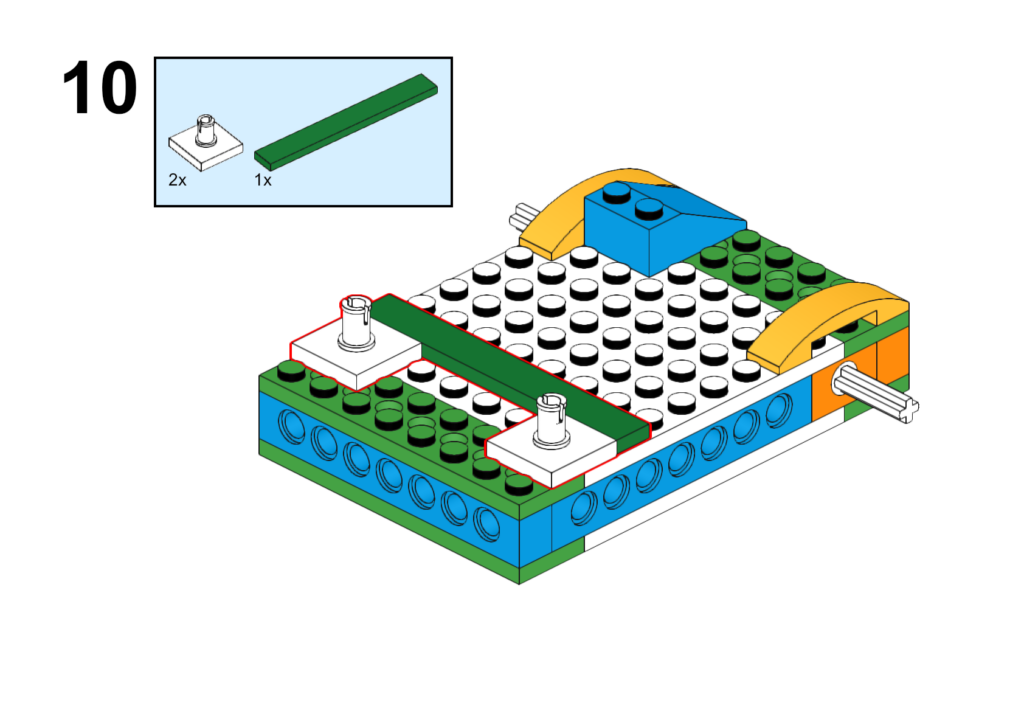
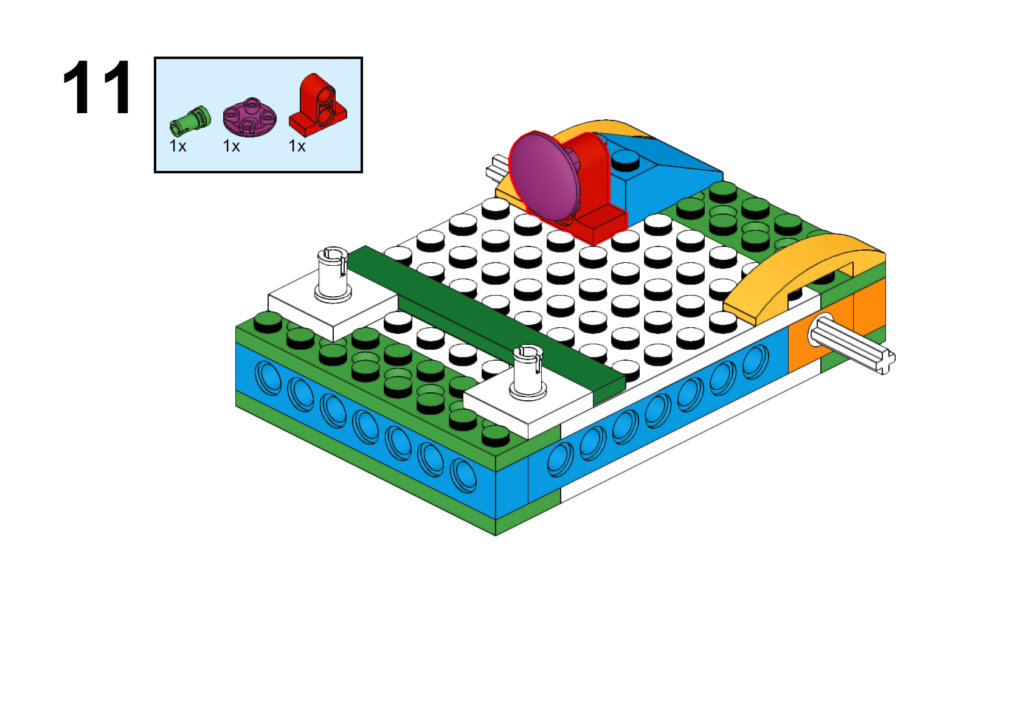
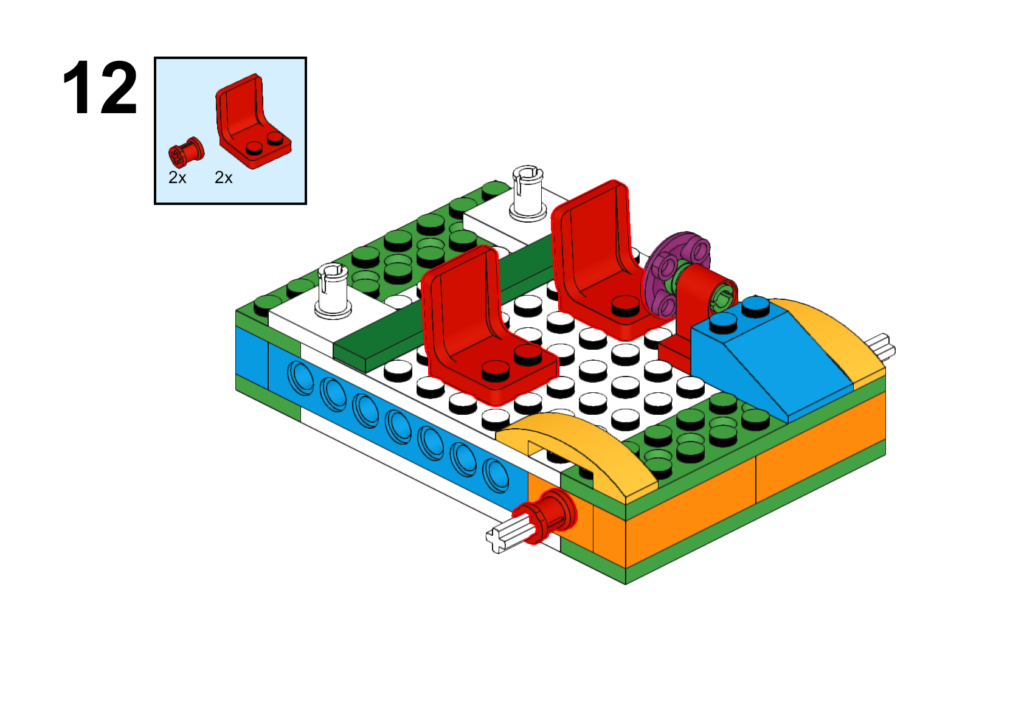
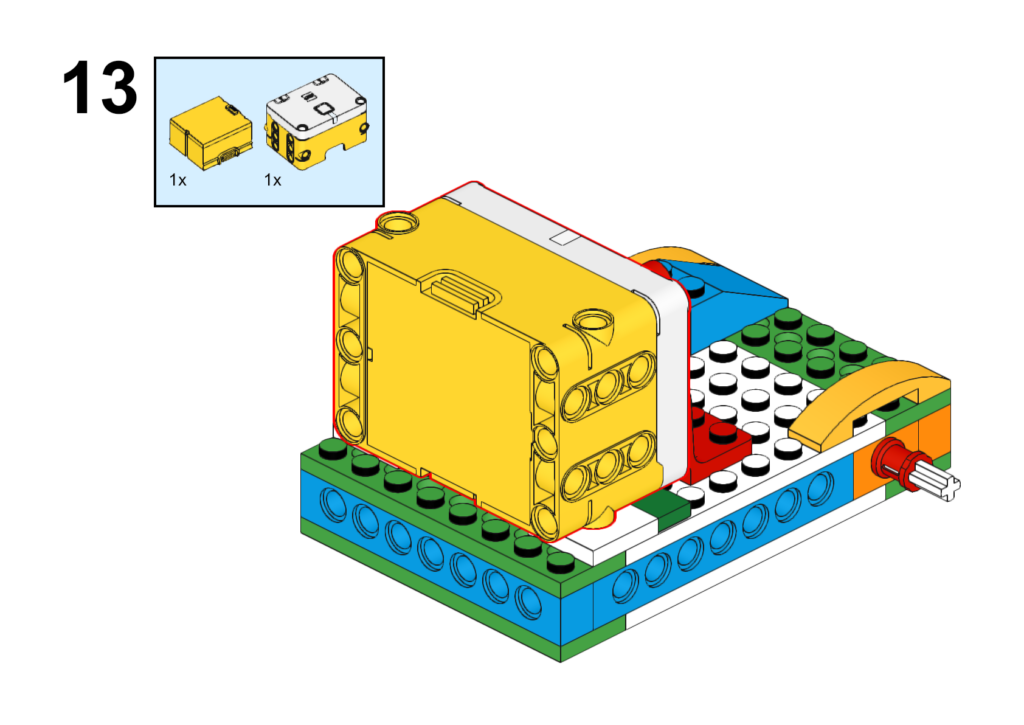
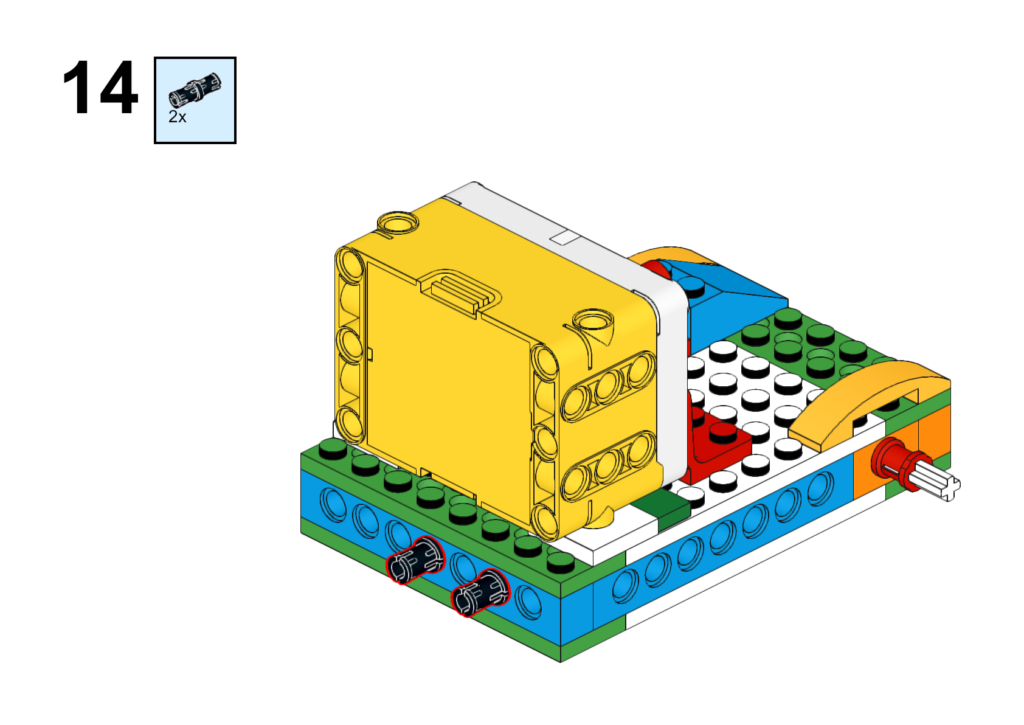
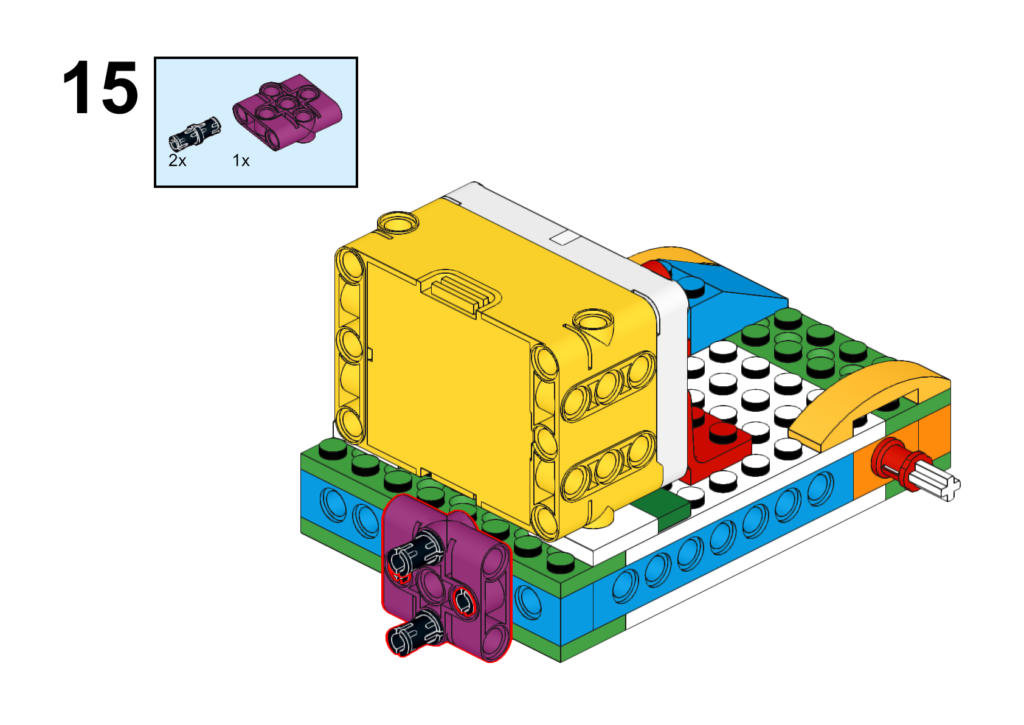
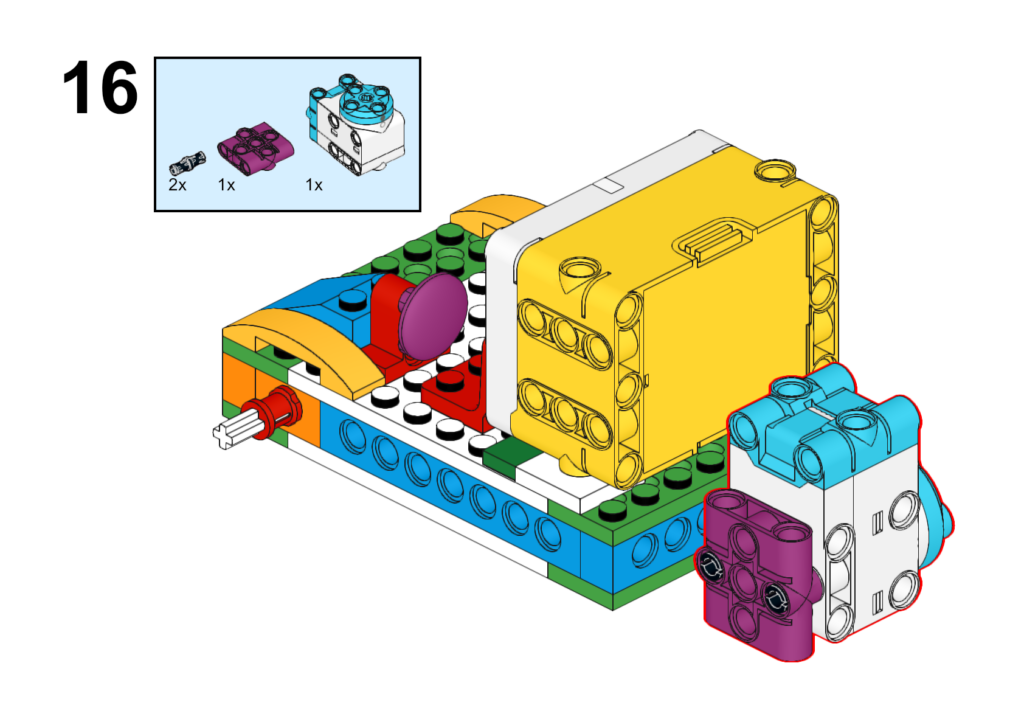
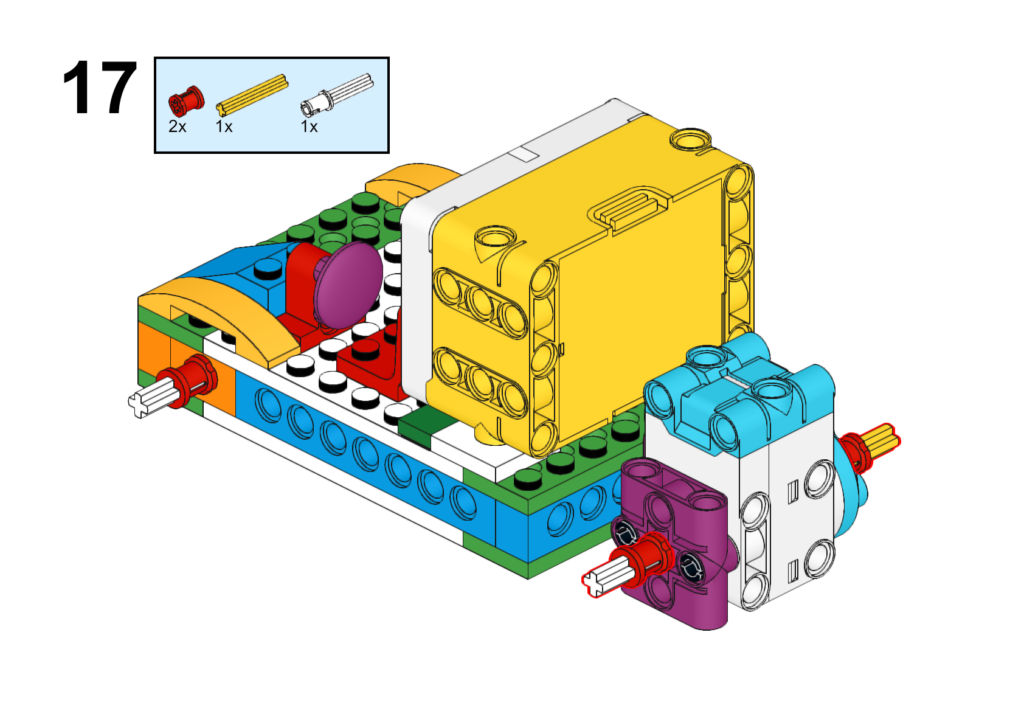
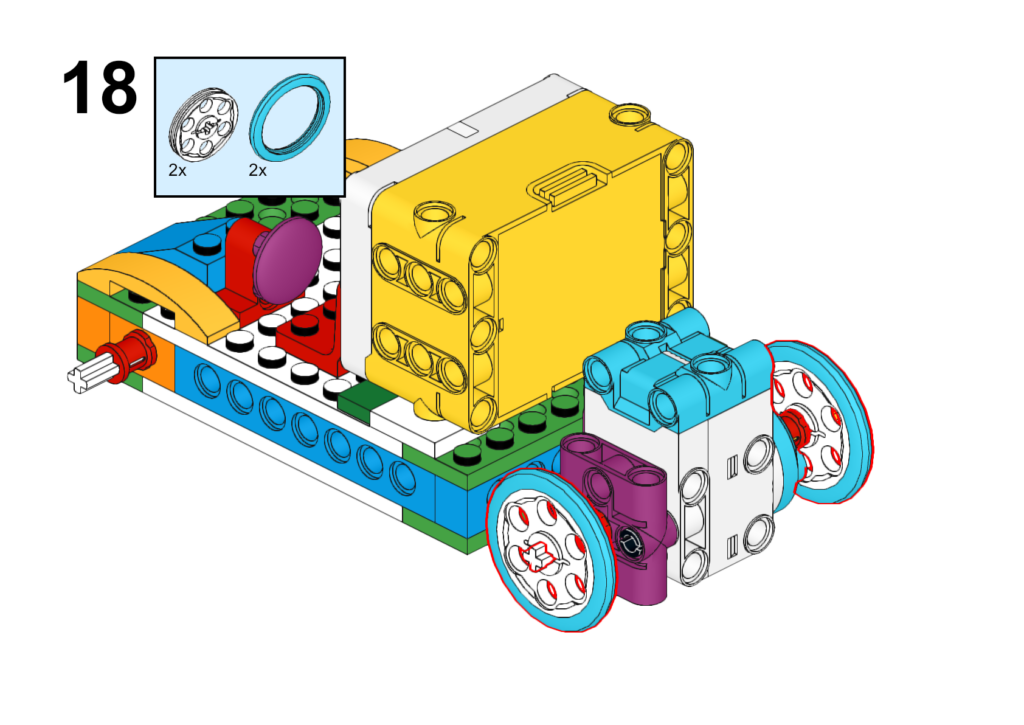
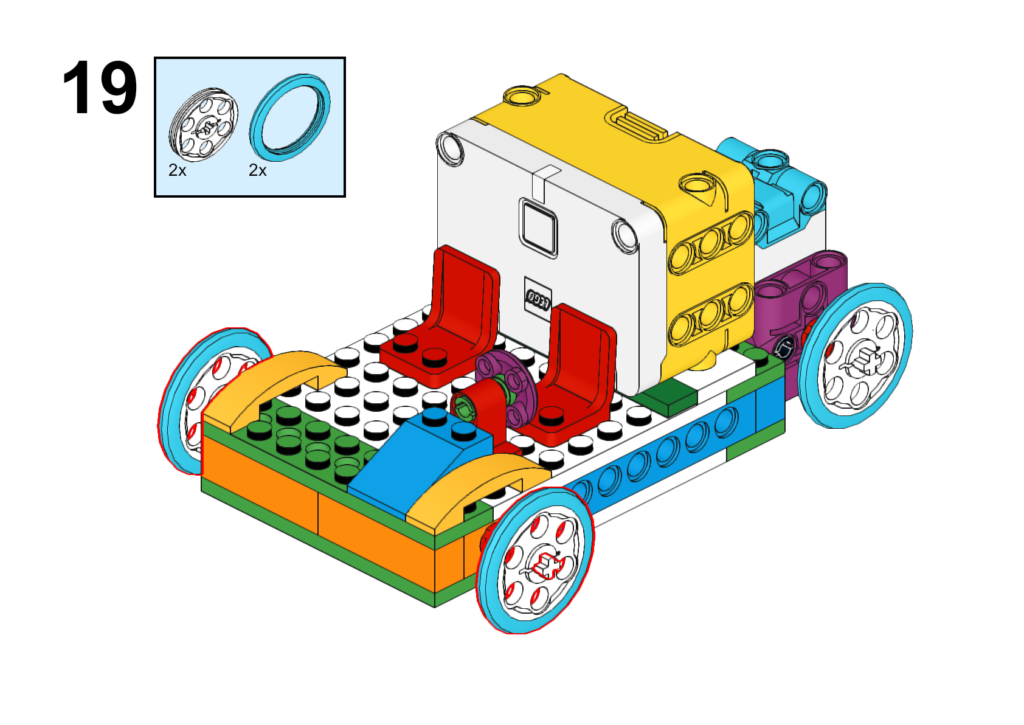
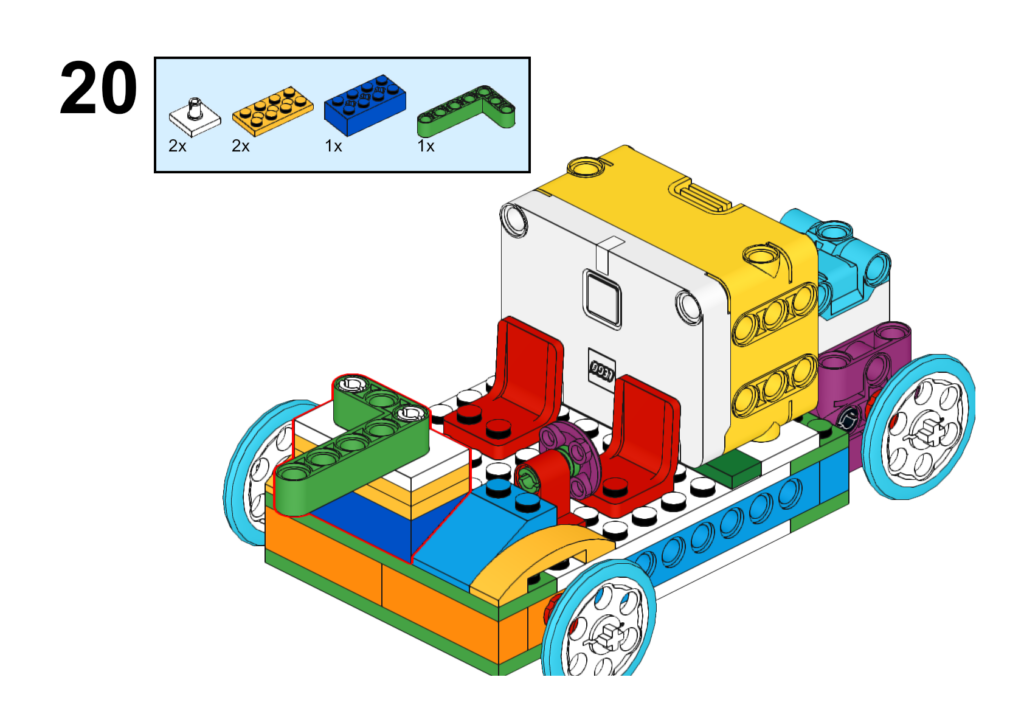
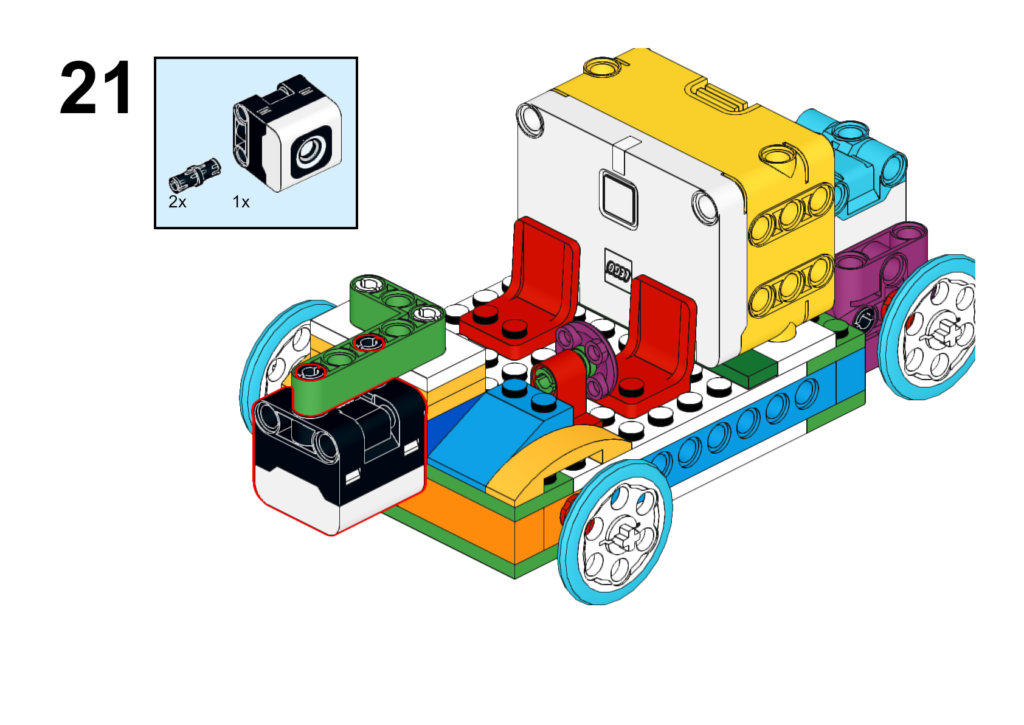
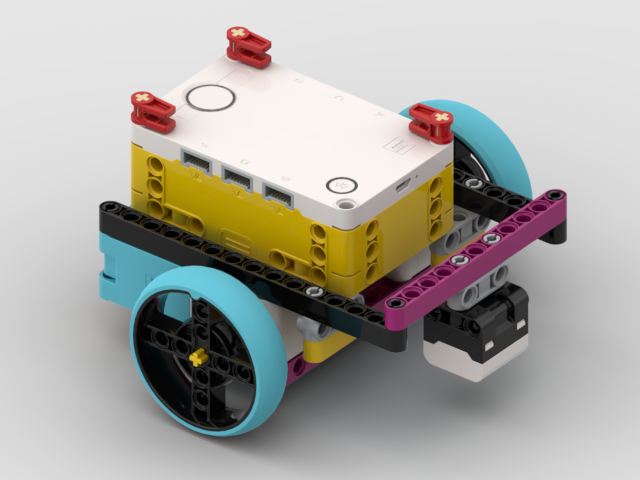
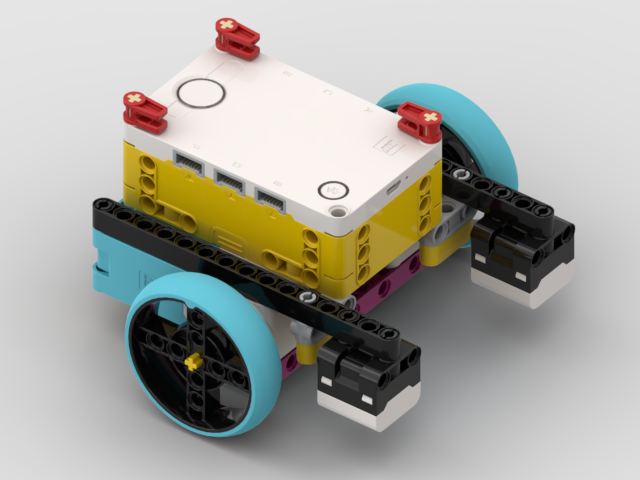
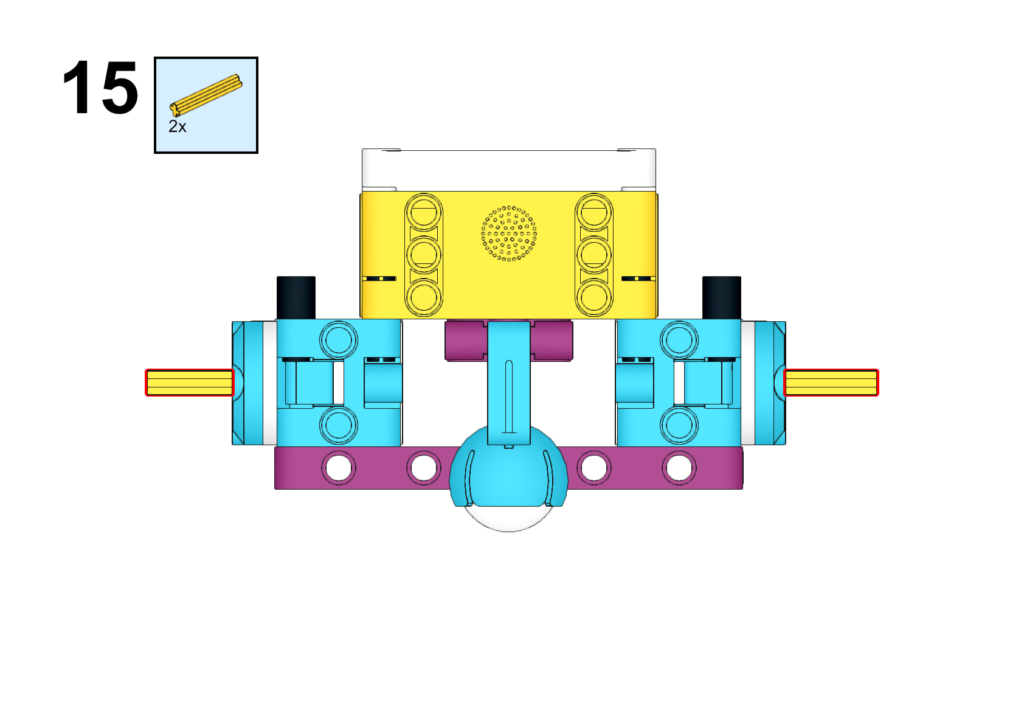
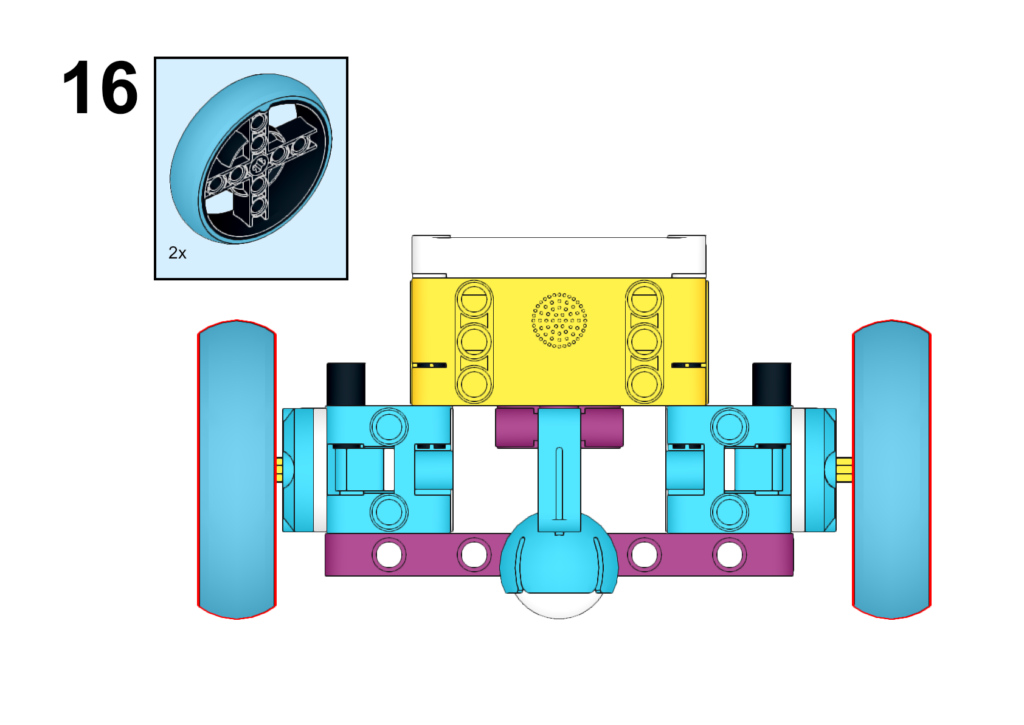
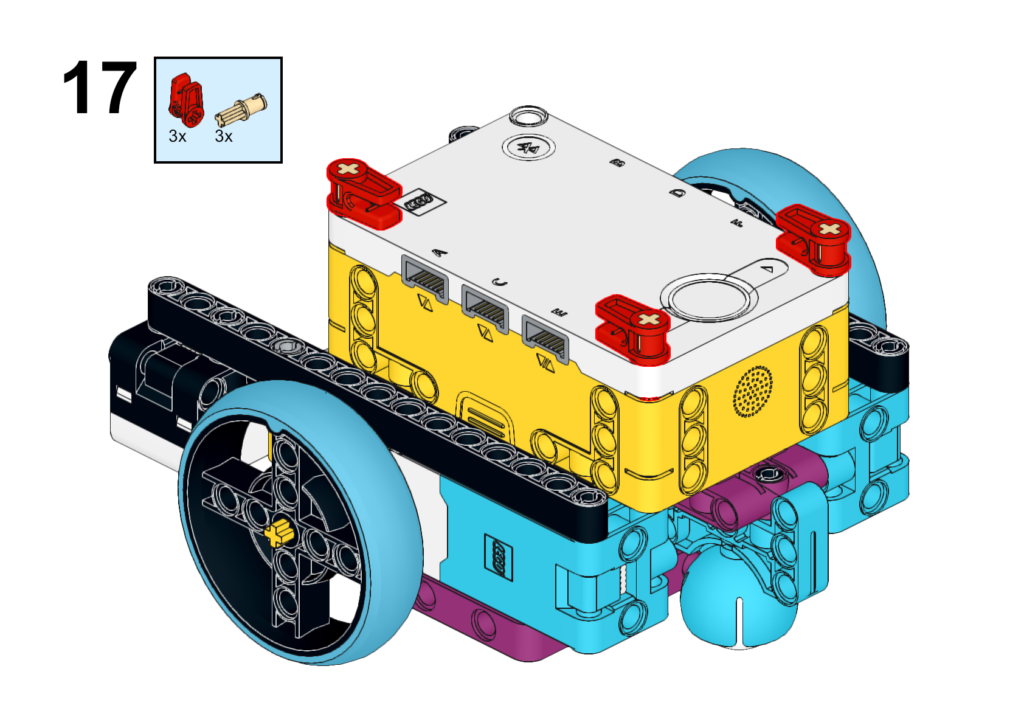
Per poder resoldre el repte, haureu de construir un vehicle. Una opció de construcció seria la que us oferim a continuació, basada en el model Taxi! Taxi!, però amb algunes modificacions. Aquesta opció és només una orientació, podeu construir el model que vulgueu.
El muntatge final d’aquesta proposta queda així:
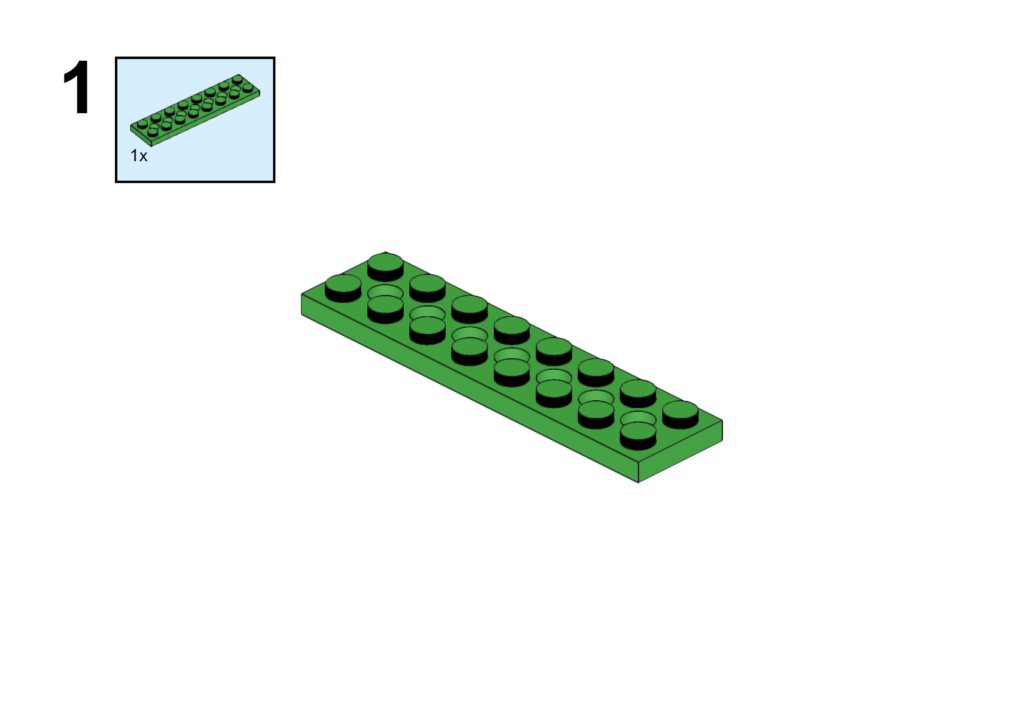
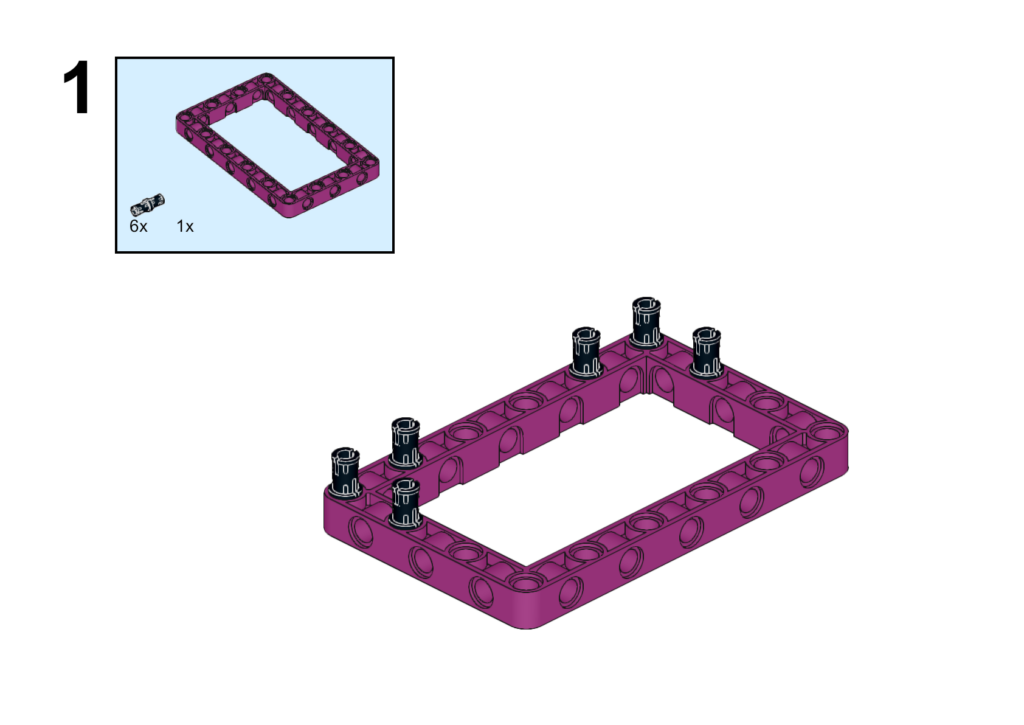
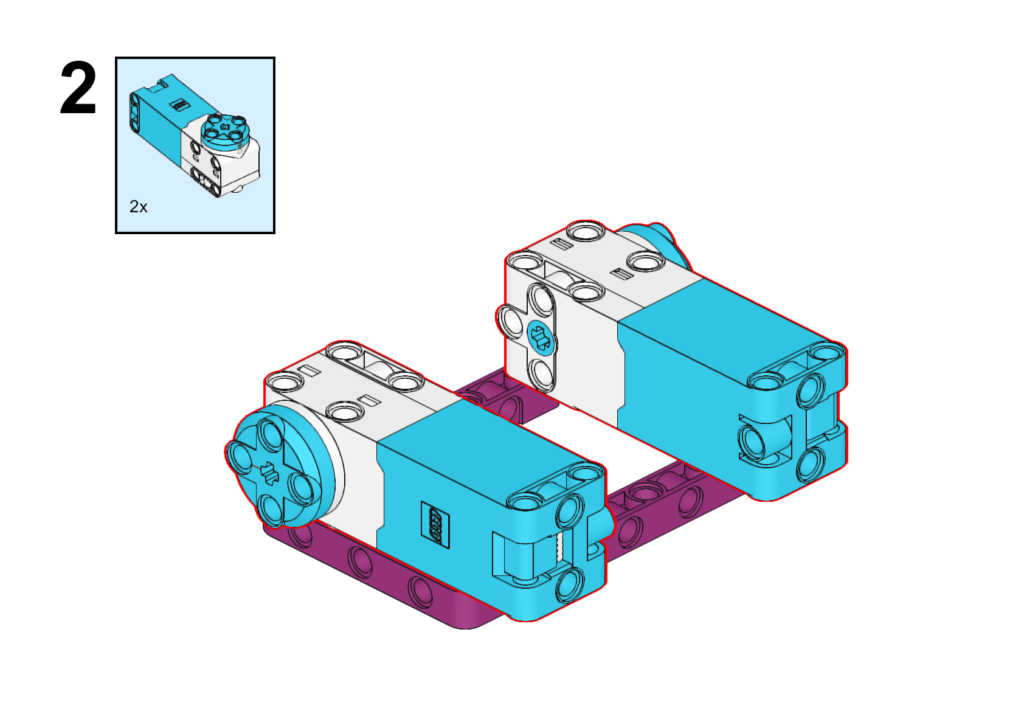
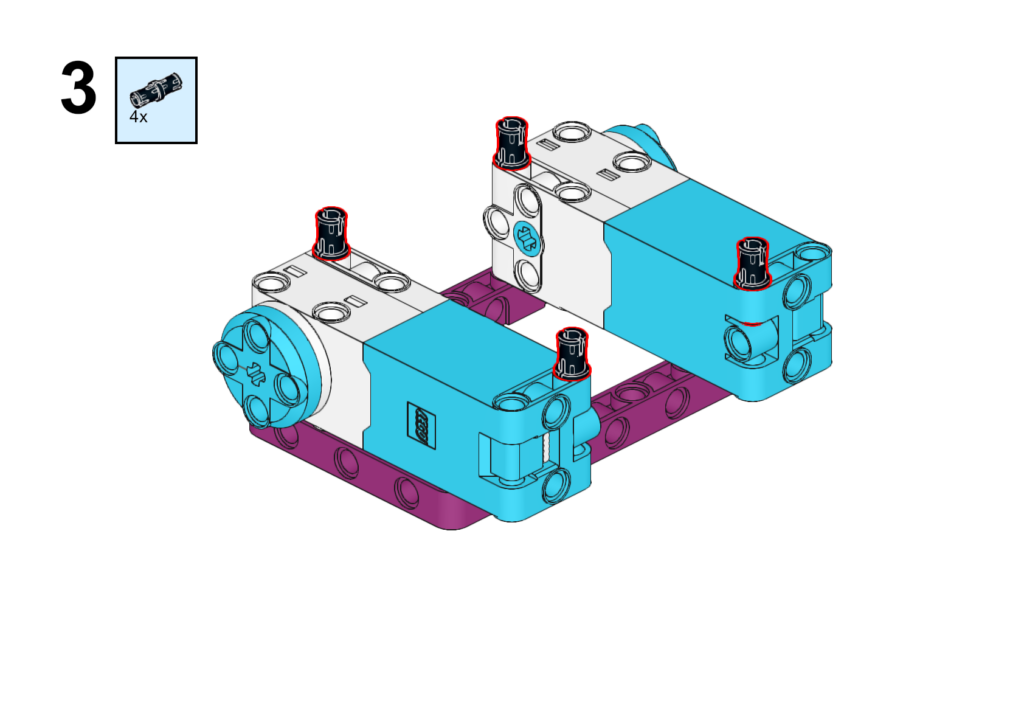
Seguiu els passos de muntatge que teniu a continuació:
Programació del robot
Veieu la presentació (Treballem amb el sensor de color). Un cop tingueu determinats els valors dels percentatges de llum reflectida en els dos casos (amb il·luminació de la llanterna i sense), orienteu el robot sense moure’l de lloc i, amb una llanterna, il·lumineu el terra uns centímetres per davant del robot, perquè el sensor de llum del robot detecti la llum reflectida. Aneu movent la llanterna perquè el robot segueixi la llum i arribi al punt objectiu i completi la missió.
Per a la programació del sensor de color utilitzareu els blocs de la llibreria “sensors”.
Per fer anar el robot endavant haureu d’il·luminar la superfície al davant del sensor de color.
- Utilitzeu un bloc “per sempre” de la categoria de control, per aconseguir que la lectura del sensor sigui contínua.
- Quan el sensor de color detecti un percentatge de reflexió menor al que heu establert, feu el següent:
- Fixeu la potència del motor al 75% per disminuir una mica la velocitat de rotació.
- Poseu el motor en marxa.
- En cas contrari, feu que el motor s’aturi.


El repte
En aquest primer repte haureu de guiar el vostre robot fins a la nau utilitzant la llum.
Preparació de la missió
Abans de començar la missió, convé que tingueu molt clar com heu de configurar el sensor de color per poder treballar amb la llum reflectida, consulteu l’apartat anterior Treballem amb el sensor de color.
Què necessiteu?
✅ Material de LEGO (hub, peces de construcció, dues rodes, dos motors de mida mitjana i un sensor de color.
✅ Un punt que representi la nau, objectiu de la missió (feu un cercle de color o qualsevol element que vulgueu). Fixeu-lo al terra amb cinta adhesiva.
⚠️ És important que utilitzeu una font de llum 🔦 que tingui força intensitat.

Construcció del robot
Per poder resoldre el repte, haureu de construir un vehicle. Una opció de construcció seria la que us oferim a continuació. Aquesta opció és només una orientació, podeu construir el model que vulgueu.
Seguiu els passos de muntatge que teniu a continuació:
Programació del robot
Veieu la presentació (Treballem amb el sensor de color). Un cop tingueu determinats els valors dels percentatges de llum reflectida en els dos casos (amb il·luminació de la llanterna i sense), heu d’aconseguir el següent:
- Des del punt d’inici, orienteu el robot cap al punt objectiu que representa la nau.
- Quan s’il·lumina amb una llanterna la superfície davant del robot, aquest ha d’avançar lentament en línia recta.
- Quan deixeu d’il·luminar amb la llanterna davant del robot, el robot s’atura.
- Aneu movent la llanterna per aconseguir que el robot segueixi la llum, arribi al punt objectiu i completi la missió.
📌 Recordeu:
- Cal que utilitzeu un bloc “per sempre” de la categoria de control, per aconseguir que la lectura del sensor sigui contínua. Si no utilitzeu aquest bloc, el programa llegirà els valors del sensor una vegada, farà l’acció corresponent i s’aturarà.
- Quan el sensor de color detecti un percentatge de reflexió menor al que heu establert, feu el següent:
- Fixeu la potència del motor al 75% per disminuir una mica la velocitat de rotació.
- Poseu el motor en marxa i feu que faci 0,5 rotacions.
- En cas contrari, feu que el motor s’aturi.
Construcció del robot
Per poder resoldre el repte, haureu de construir un vehicle. Una opció de construcció seria la que us oferim a continuació. Aquesta opció és només una orientació, podeu construir el model que vulgueu.
Programació del robot
Orientareu el robot sense moure’l de lloc i, amb una llanterna, il·luminareu la superfície just davant del sensor de color del robot. Aneu movent la llanterna perquè el robot segueixi la llum i arribi al cercle de color vermell i completi la missió.
Veieu la presentació (Treballem amb el sensor de color). Un cop tingueu determinats els valors dels percentatges de llum reflectida en els dos casos (amb il·luminació de la llanterna i sense), heu d’aconseguir el següent:
- Des del punt d’inici, orienteu el robot cap al punt objectiu que representa la nau.
- Quan premeu el botó dret de la part superior del hub, el robot ha d’avançar en línia recta a baixa velocitat.
- Quan il·lumineu al davant del sensor esquerre, el robot gira lleugerament cap a l’esquerra.
- Quan il·lumineu al davant del sensor dret, el robot gira lleugerament cap a la dreta.
- Aneu movent la llanterna per aconseguir que el robot segueixi la llum, arribi al punt objectiu i completi la missió.
- Si premeu el botó esquerre de la part superior del hub, el robot s’atura.
Al final podeu fer que el robot dugui a terme una acció per celebrar l’èxit de la missió.
Exemples i material de consulta
En aquesta activitat del catàleg de robòtica teniu un exemple de com programar el robot LEGO SPIKE Prime: