La doctora Snippet vol ajudar els Xeldonians a crear un clima semblant al de la Terra, que els permeti cultivar els aliments que necessiten.
Prepareu el vostre robot de forma que pugui recollir dades ambientals. Així, podrà situar les plantes on hi hagi les condicions òptimes i es puguin cultivar aliments de manera correcta i sostenible.
Amb la vostra creativitat farem que els Xeldonians gaudeixin d’aliments frescos i saludables.
Endavant amb el repte!
 Escolliu el vostre robot
Escolliu el vostre robot


Investigueu!
Per començar, mireu de respondre aquestes preguntes sobre el robot:
🔎 Pot carregar i traslladar una planta?
🔎 Pot moure’s cap a la posició d’una persona que li parli?
🔎 Pot detectar un obstacle que tingui al davant?


Què necessiteu?
✅ El robot Dash.
✅ Full retallable amb dibuixos de punts ambientals “òptims”.
✅ Obstacles on el robot hagi d’aturar-se.
✅ Tisores.
✅ Cinta adhesiva.
✅ Cinta velcro o adhesiva per les dues cares.
✅ Un test de plàstic petit amb una planta.

🔸 Preparació de la missió
El robot haurà de poder carregar i traslladar una planta als punts ambientals òptims:
- Fixeu les dues peces d’acoblament al robot


- Amb peces tipus Lego o altres materials construÏu una mena de pont suportat en les peces d’acoblament, que passi damunt del cap del robot.
- Fixeu al “pont”, amb velcro o cinta adhesiva per les dues cares, el test amb la planta.


Prepareu també l’espai per on es mourà el robot:
- Necessitareu un espai ben ampli, en el terra, per on es mogui el robot.
- Retalleu els dibuixos de punts ambientals i fixeu-los al terra amb cinta adhesiva.
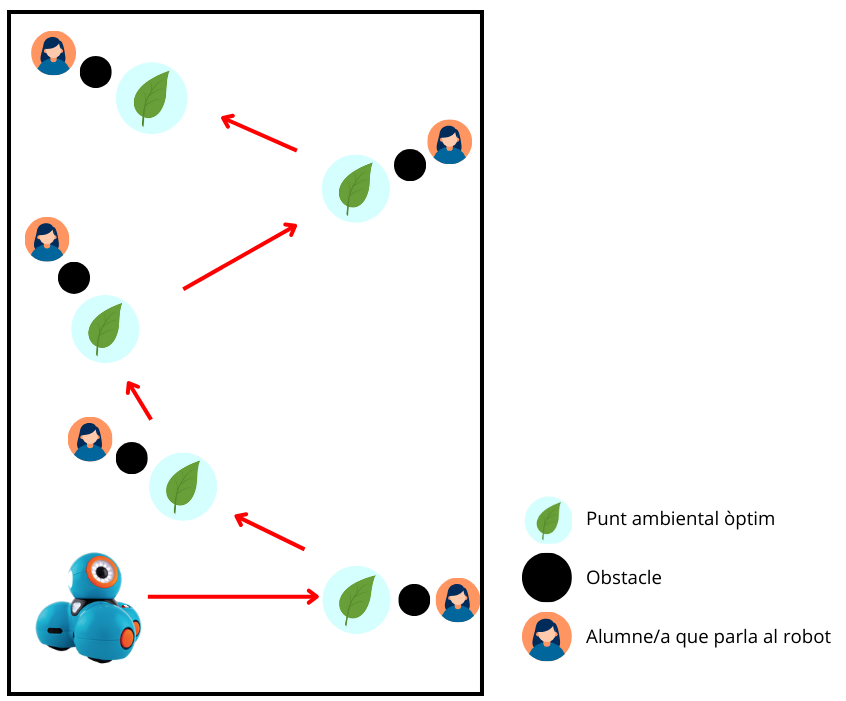
- Poseu obstacles que facin aturar el robot en els punts ambientals. Feu-ho de forma que, quan el robot s’orienti cap a un nou punt ambiental, no torni a detectar l’obstacle anterior.
- Rere cada obstacle hi haurà un/a alumne/a que parlarà al robot per tal que el robot es mogui cap al punt ambiental.
- Situeu el robot al terra, en el punt de partida.
🔸 Programació del robot
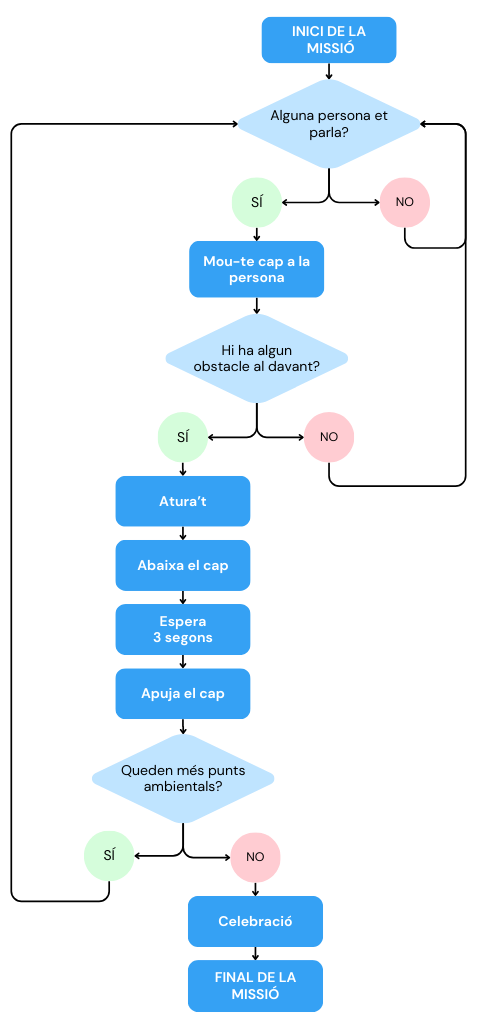
El robot Dash haurà d’escoltar la persona que li parla (situada rere un obstacle) i moure’s cap a ella, fins que detecti algun obstacle corresponent a un dels punts ambientals. Llavors, haurà d’abaixar el cap per recollir (de forma simulada) aigua per a la planta i, passats 3 segons, apujar-lo per regar-la.
Després, el robot continuarà escoltant, repetint tot el procediment fins que la planta s’hagi regat en els 5 punts ambientals.
Finalment, celebrarà que la missió ha estat un èxit (sigueu creatius!).
🔸 Diagrama de flux
🔸 Blocs recomanats
A continuació us donem algunes idees sobre els blocs de programació de Dash que podeu utilitzar:
👉🏾 Esdeveniments:

👉🏾 Control:
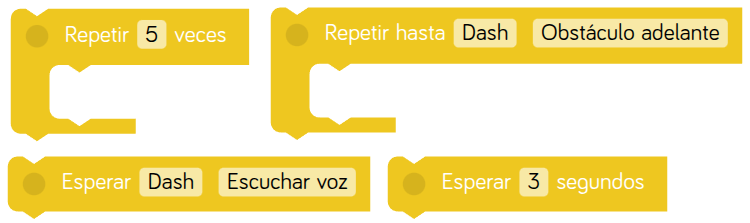
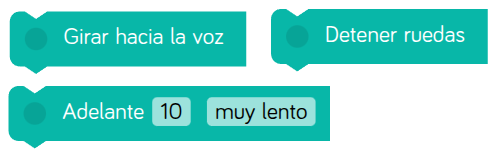
👉🏾 Acció:
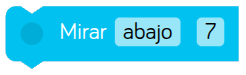
👉🏾 Mirar:
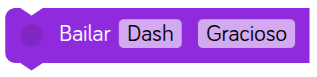
👉🏾 Animacions:
🔸 Recomanacions
- Hi haurà 5 alumnes, cadascun rere un dels 5 obstacles. Només ha de parlar l’alumne que toqui, fins que el robot arribi al punt ambiental. Coordineu-vos bé!
🔸 Millores al programa
- Afegiu efectes visuals i sonors al robot per saber en quin estat es troba durant la missió (escoltant, movent-se, regant…).


Investigueu!
Per començar, mireu de respondre aquestes preguntes:
🔎 El robot té sensor de temperatura?
🔎 Té algun altre sensor que permeti recollir dades ambientals?

Què necessiteu?
La missió la fareu a terra amb el robot Edison. Necessitareu:
✅ El robot Edison.
✅ Fulls DINA3 per imprimir el taulell.
✅ Cinta adhesiva (ampla) per unir els fulls DINA3.

🔸 Preparació de la missió
Com que el robot Edison no té sensors que permetin recollir dades ambientals, ajudareu els xeldonians programant un robot perquè sigui capaç de fer un recorregut per recollir els aliments que calen per fer alguna recepta saludable i les porti fins a la cuina.
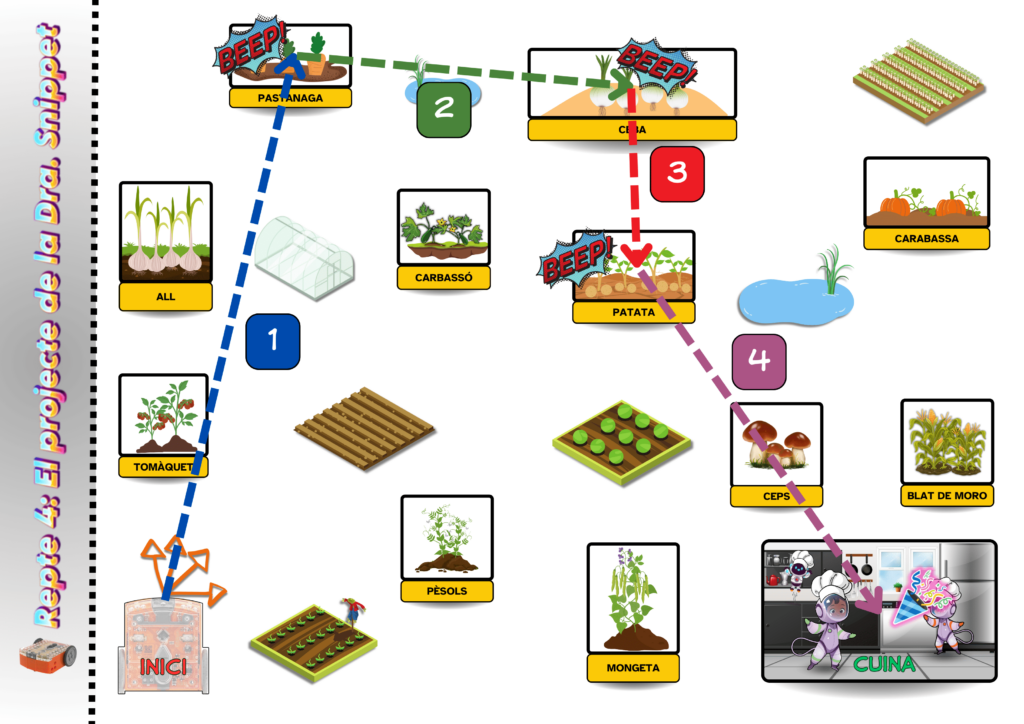
A l’exemple que teniu a continuació, volem preparar una crema de pastanagues. Per fer-la, necessitarem:
- 🥕 Unes pastanagues ben fresques.
- 🧅 Un parell de cebes.
- 🥔 Una patata gran.
Caldrà que busqueu aquestes hortalisses al plànol i que programeu el robot perquè les vagi recollint. A més, cada cop que arribi a un dels ingredients, haurà de fer un so beep.
Per recollir els ingredients per fer la recepta de la crema de pastanagues, l’Edison podria fer un recorregut com aquest:
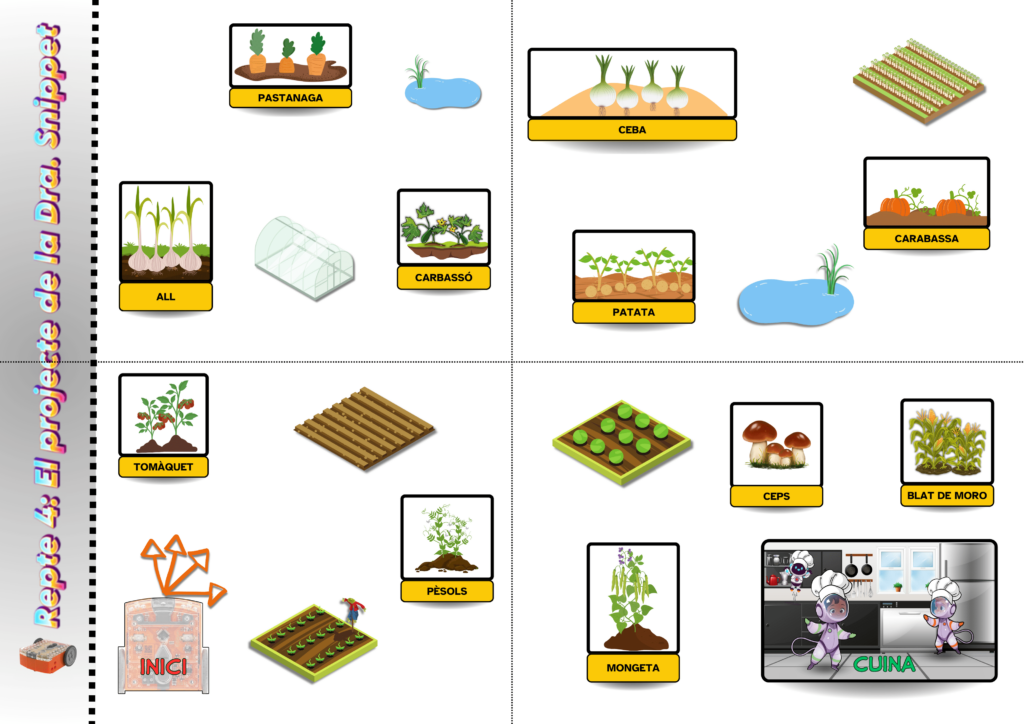
🔸 Com fer el taulell
Per fer el taulell on hi ha els aliments que l’Edison haurà d’anar recollint, utilitzeu els arxius que teniu a continuació.
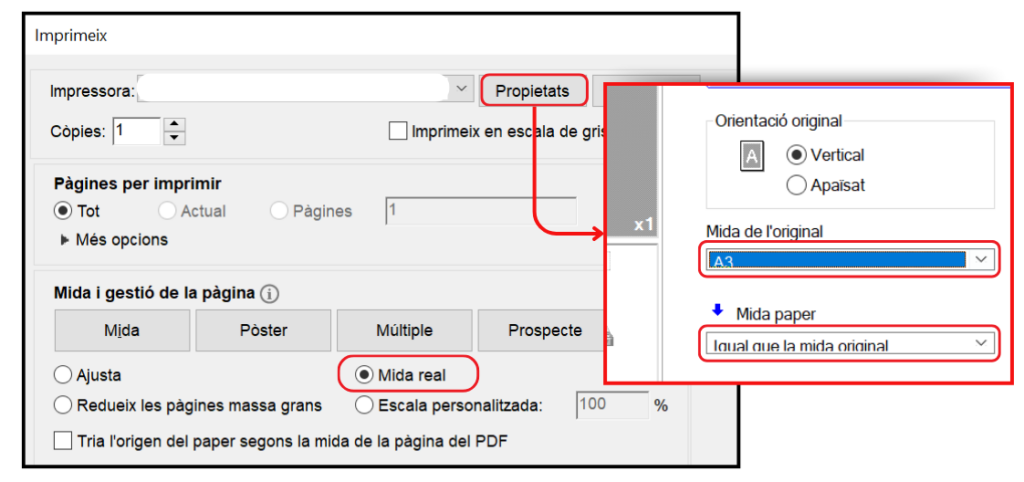
🖨️ Imprimiu cadascuna de les 4 pàgines en un full DINA3. Per tal que les dimensions siguin correctes, és molt important que seleccioneu DINA3 com a mida de l’original.
👉🏽 Uniu els 4 fulls DINA3 amb cinta adhesiva i ja teniu el taulell a punt per començar la collita! 👍🏽
🔸 Les receptes
Us oferim 4 receptes diferents per poder fer recorreguts amb el robot i també una plantilla buida perquè pugueu fer les vostres pròpies receptes, ja que algunes de les hortalisses no surten a les 4 receptes que us donem:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Us deixem una plantilla per si voleu fer les vostres pròpies receptes:
Us enllacem també la plantilla feta amb canva, per si la voleu fer digitalment.
🔸 Programació del robot
⚠️ En les orientacions que trobareu a continuació s’ha utilitzat EdScratch. Us recomanem que instal·leu l’extensió EdScratchCatalà en el vostre navegador (Chrome o Edge).
En aquesta ocasió, fareu servir només blocs de moviment i el bloc de so bip.
1️⃣ Bloc per orientar el robot cap al següent punt de recollida:

2️⃣ Bloc per fer avançar el robot:
3️⃣ Bloc per fer el so bip:

🔸 Ampliacions i millores
💡 Feu que el robot faci alguna acció de celebració (girar, ballar…) quan arribi a la cuina amb tots els ingredients.
💡 Marqueu el recorregut pel taulell amb cinta adhesiva negra i feu servir el seguidor de línies per programar el recorregut (consulteu el repte 3).
Material de consulta


Investigueu!
Per començar, mireu de respondre aquestes preguntes:
🔎 Quins són els paràmetres ambientals més importants?
🔎 Quins paràmetres ambientals pot mesurar directament el robot?
🔎 Com pot el robot obtenir el valor d’altres paràmetres ambientals?

Què necessiteu?
✅ El robot Codey Rocky (en teniu prou amb la part superior, Codey).
✅ Full retallable de fruites xeldonianes.
✅ Plantilla de pòster de fruita inventada.
✅ Tisores.
✅ Cola per enganxar.
🔸 Preparació de la missió
- En l’entorn de programació mBlock, incorporeu el dispositiu “Codey” i instal·leu l’extensió IoT.
- Connecteu el robot amb l’ordinador.
- Si encara no en teniu, creeu un usuari per accedir al núvol mBlock i poder recollir les dades ambientals en la vostra població.
- Inicieu sessió a mBlock.
🔸 Programació
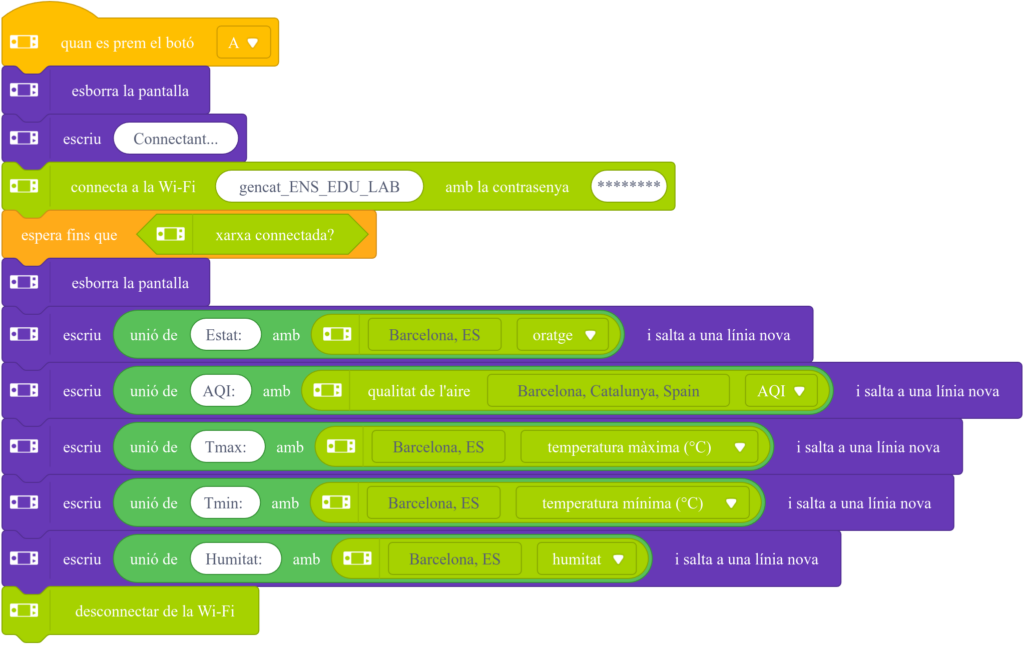
En la primera part del repte, el robot es connectarà a Internet i farà peticions al núvol mBlock per obtenir els valors de paràmetres ambientals en la vostra població:
- Descripció del temps atmosfèric
- Índex de qualitat de l’aire (AQI)
- Temperatura màxima
- Temperatura mínima
- Humitat
Un cop obtinguts aquests valors, els mostrarà en la seva pantalla.
Heu de fer un seguiment diari dels valors durant una setmana escolar, de dilluns a divendres. Podeu descarregar i imprimir el model per anotar aquests valors.
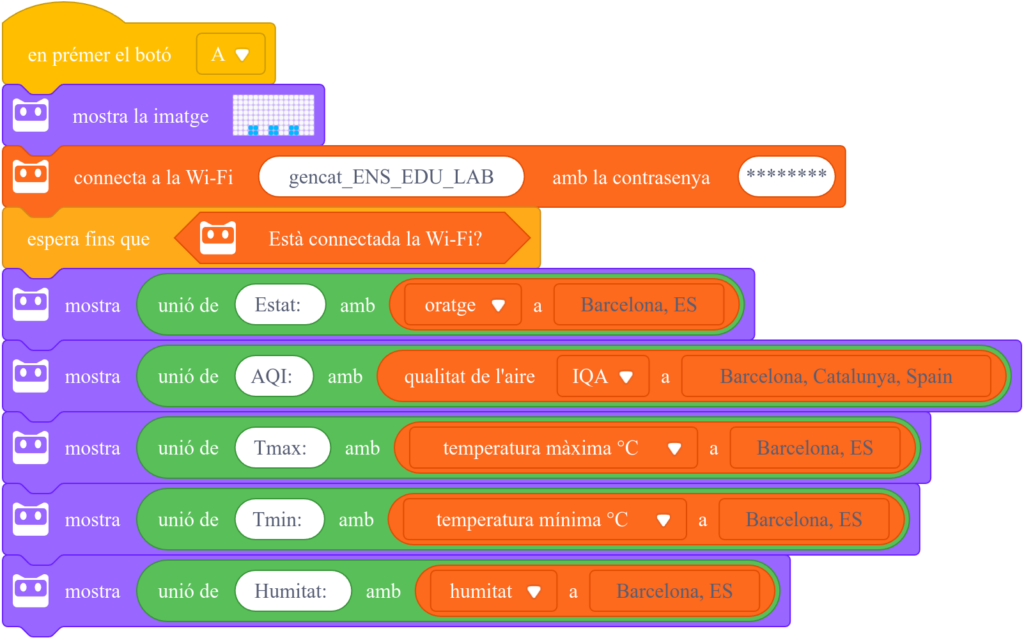
En el bloc de connexió a la xarxa wifi del centre heu d’escriure-hi la contrasenya on hi ha els asteriscs.
En els blocs de color taronja cal seleccionar la població més propera al vostre centre educatiu (entre les disponibles en el núvol mBlock).
Les llavors dels arbres fruiters de Xeldon necessiten una humitat relativa que es mantingui dins d’un cert marge de valors, segons s’indica en la taula de fruites:
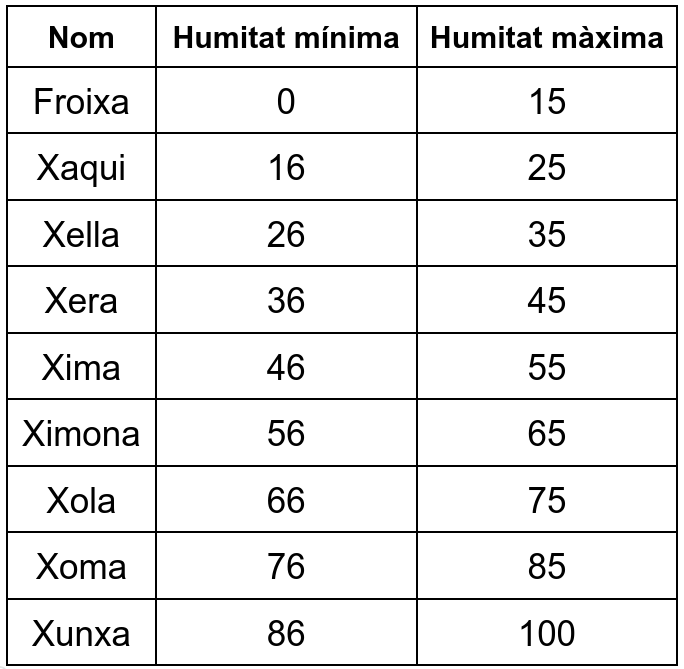
En les dues darreres columnes del full de registre setmanal heu d’escriure el nom de la fruita que correspon segons el valor d’humitat registrat i enganxar-hi la imatge corresponent del full retallable de fruites.
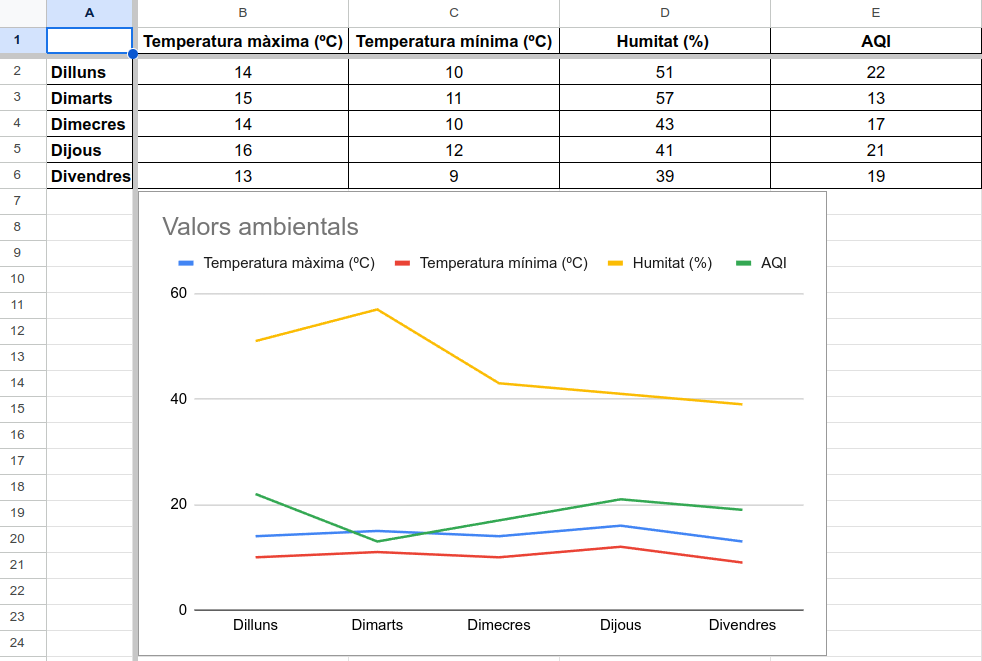
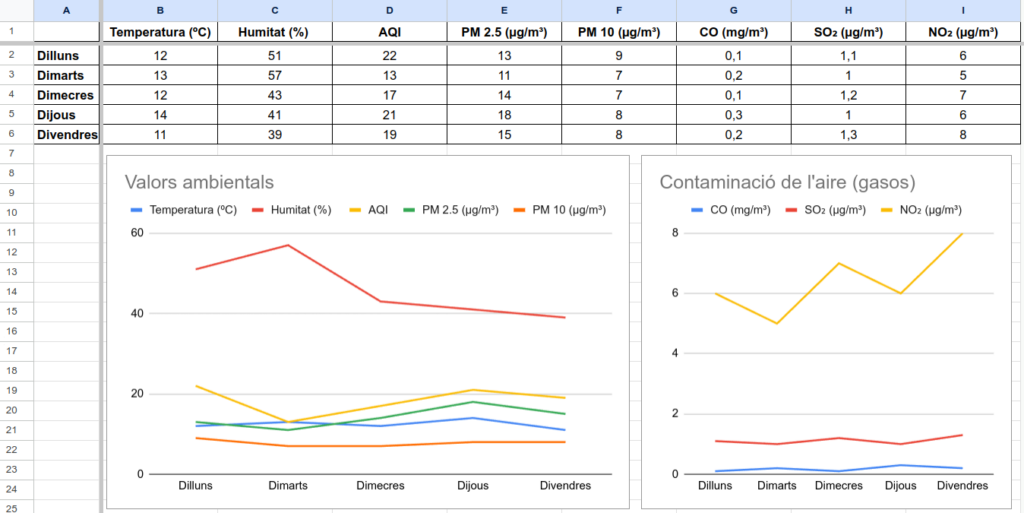
En la segona part del repte, un cop tingueu emplenat el full de registre, feu un diagrama de línies per a tots els valors de paràmetres ambientals registrats.
Podeu fer una còpia de la plantilla amb el diagrama ja creat (només us caldrà escriure els valors numèrics en cada casella).
Obtindreu un diagrama com aquest:
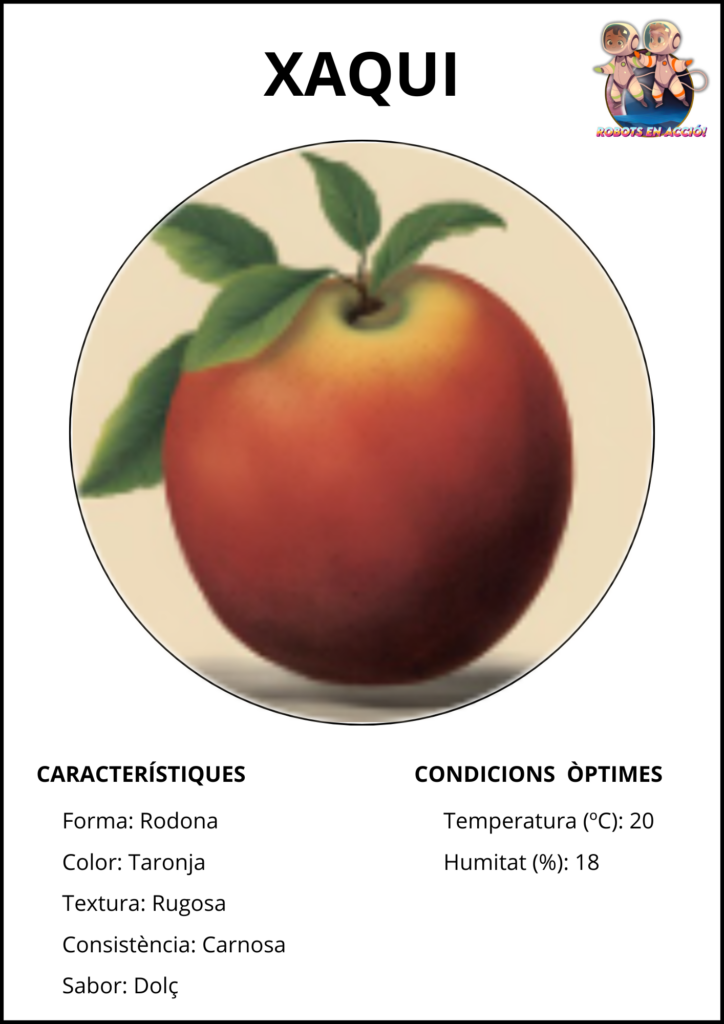
En la tercera part del repte fareu un pòster d’una fruita xeldoniana inventada per vosaltres. Teniu dues opcions:
- Fer-lo amb l’ordinador amb qualsevol programa d’edició o algun dissenyador web com Canva.
- Imprimir la plantilla i dibuixar la fruita en el cercle central.
En el pòster, escriviu-hi:
- El nom de la fruita.
- La forma: rodona, allargada…
- El color.
- La textura: llisa, rugosa…
- La consistència: carnosa, seca…
- El sabor: dolç, amarg, àcid…
- La temperatura òptima per al creixement.
- La humitat òptima per al creixement.
Obtindreu un pòster com aquest:
🔸 Millores o ampliacions
Obteniu i afegiu al full de registre valors de paràmetres de contaminació ambiental: partícules (PM 2.5 i PM 10) i gasos (CO, SO₂ i NO₂).
🔸 Material de consulta


Investigueu!
Per començar, mireu de respondre aquestes preguntes:
🔎 Quins són els paràmetres ambientals més importants?
🔎 Quins paràmetres ambientals pot mesurar directament el robot?
🔎 Com pot obtenir altres dades ambientals?

Què necessiteu?
✅ El robot mBot2 (en teniu prou amb la CyberPi).
✅ Full retallable de fruites xeldonianes.
✅ Plantilla de pòster de fruita inventada.
✅ Tisores.
✅ Cola per enganxar.
🔸 Preparació de la missió
- En l’entorn de programació mBlock, incorporeu el dispositiu “CyberPi”.
- Connecteu el robot amb l’ordinador.
- Si encara no en teniu, creeu un usuari per accedir al núvol mBlock i poder recollir les dades ambientals en la vostra població.
- Inicieu sessió a mBlock.
🔸 Programació
En la primera part del repte, el robot es connectarà a Internet i farà peticions al núvol mBlock per obtenir els valors de paràmetres ambientals en la vostra població:
- Descripció del temps atmosfèric
- Índex de qualitat de l’aire (AQI)
- Temperatura màxima
- Temperatura mínima
- Humitat
Un cop obtinguts aquests valors, els mostrarà en la seva pantalla.
Heu de fer un seguiment diari dels valors durant una setmana escolar, de dilluns a divendres. Podeu descarregar i imprimir el model per anotar aquests valors.
En el bloc de connexió a la xarxa wifi del centre heu d’escriure-hi la contrasenya on hi ha els asteriscs.
En els blocs de color taronja cal seleccionar la població més propera al vostre centre educatiu (entre les disponibles en el núvol mBlock).
Les llavors dels arbres fruiters de Xeldon necessiten una humitat relativa que es mantingui dins d’un cert marge de valors, segons s’indica en la taula de fruites:
En les dues darreres columnes del full de registre setmanal heu d’escriure el nom de la fruita que correspon segons el valor d’humitat registrat i enganxar-hi la imatge corresponent del full retallable de fruites.
En la segona part del repte, un cop tingueu emplenat el full de registre, feu un diagrama de línies per a tots els valors de paràmetres ambientals registrats.
Podeu fer una còpia de la plantilla amb el diagrama ja creat (només us caldrà escriure els valors numèrics en cada casella).
Obtindreu un diagrama com aquest:
En la tercera part del repte fareu un pòster d’una fruita xeldoniana inventada per vosaltres. Teniu dues opcions:
- Fer-lo amb l’ordinador amb qualsevol programa d’edició o algun dissenyador web com Canva.
- Imprimir la plantilla i dibuixar la fruita en el cercle central.
En el pòster, escriviu-hi:
- El nom de la fruita.
- La forma: rodona, allargada…
- El color.
- La textura: llisa, rugosa…
- La consistència: carnosa, seca…
- El sabor: dolç, amarg, àcid…
- La temperatura òptima per al creixement.
- La humitat òptima per al creixement.
Obtindreu un pòster com aquest:
🔸 Millores o ampliacions
Obteniu i afegiu al full de registre valors de paràmetres de contaminació ambiental: partícules (PM 2.5 i PM 10) i gasos (CO, SO₂ i NO₂).
🔸 Exemples i material de consulta


Investigueu!
Per començar, mireu de respondre aquestes preguntes sobre el robot:
🔎 Pot mesurar valors ambientals (temperatura, humitat, llum…)?
🔎 Com pot obtenir altres dades ambientals?
Què necessiteu?
✅ Conjunt LEGO SPIKE Essential (hub, peces de construcció, sensor de color, motor).
✅ Paper film transparent (opcional).

🔸 Construcció del dispositiu
Haureu comprovat que el LEGO Spike Essential no té sensor de temperatura. Tot i així, a l’entorn de programació de LEGO SPIKE podeu trobar blocs per treballar amb dades de la previsió meteorològica de la vostra ubicació. En aquest repte, us demanem que construïu un hivernacle que tingui alguna part mòbil que permeti que es pugui ventilar quan la temperatura sigui massa alta.
Us oferim dos recursos: una explicació per treballar amb els blocs de clima directament en pantalla i un exemple de construcció d’un hivernacle.
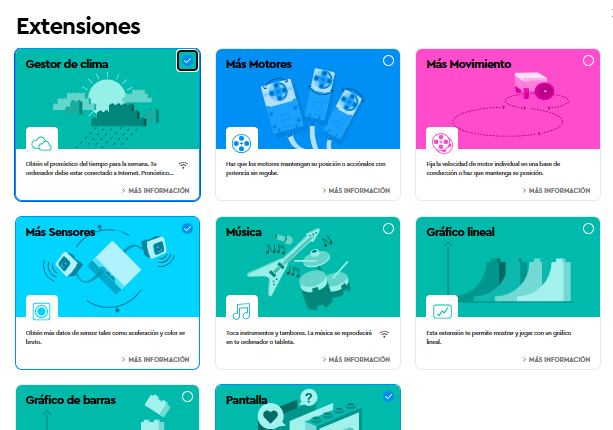
Per carregar el blocs de clima, busqueu aquesta icona a baix a l’esquerra a l’entorn de programació de LEGO Education SPIKE:

Quan feu això, s’obre una finestra amb diverses extensions que podeu carregar. Carregueu l’extensió que es diu “Gestor de clima”:
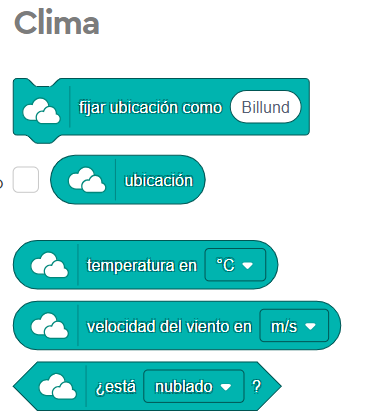
Quan hàgiu carregat aquesta extensió, tindreu una nova categoria de blocs, anomenada “clima”:
Podeu utilitzar aquests blocs per condicionar la programació del vostre hivernacle, però també teniu l’opció de veure aquestes dades directament a l’ordinador. Per fer-ho, carregueu l’extensió “Pantalla”:
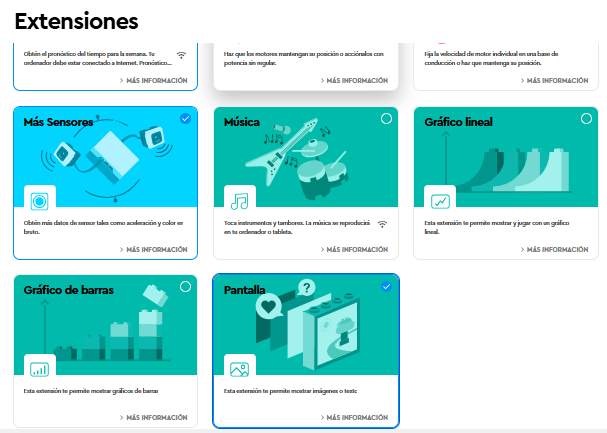
Quan carregueu l’extensió “Pantalla”, us apareixerà la categoria de blocs “Pantalla” i veureu aquesta icona a la part inferior esquerra de l’àrea de treball:

Si feu clic sobre la icona, s’obrirà una petita pantalla:
Podeu treballar amb les dades del gestor de clima i mostrar-les en aquesta pantalla. A continuació, farem un petit exemple: mostrarem la temperatura actual d’una ubicació i la velocitat del vent i farem que es vagin alternant cada 3 segons:
1. De la categoria “Clima”, situeu el bloc “fijar ubicación como” a sota de “cuando se inicia el programa” i poseu el nom de la vostra població:

2. A continuació, del bloc “Control” trieu el bloc “por siempre”. A dins d’aquest bloc, de la categoria “Pantalla”, escolliu el bloc “Escribir Hola” i del bloc “Operadors”, col·loqueu el bloc “unir…” on diu “Hola”. Per tal que es mostrin les unitats, poseu un altre bloc “unir” a dins del primer bloc “unir”:
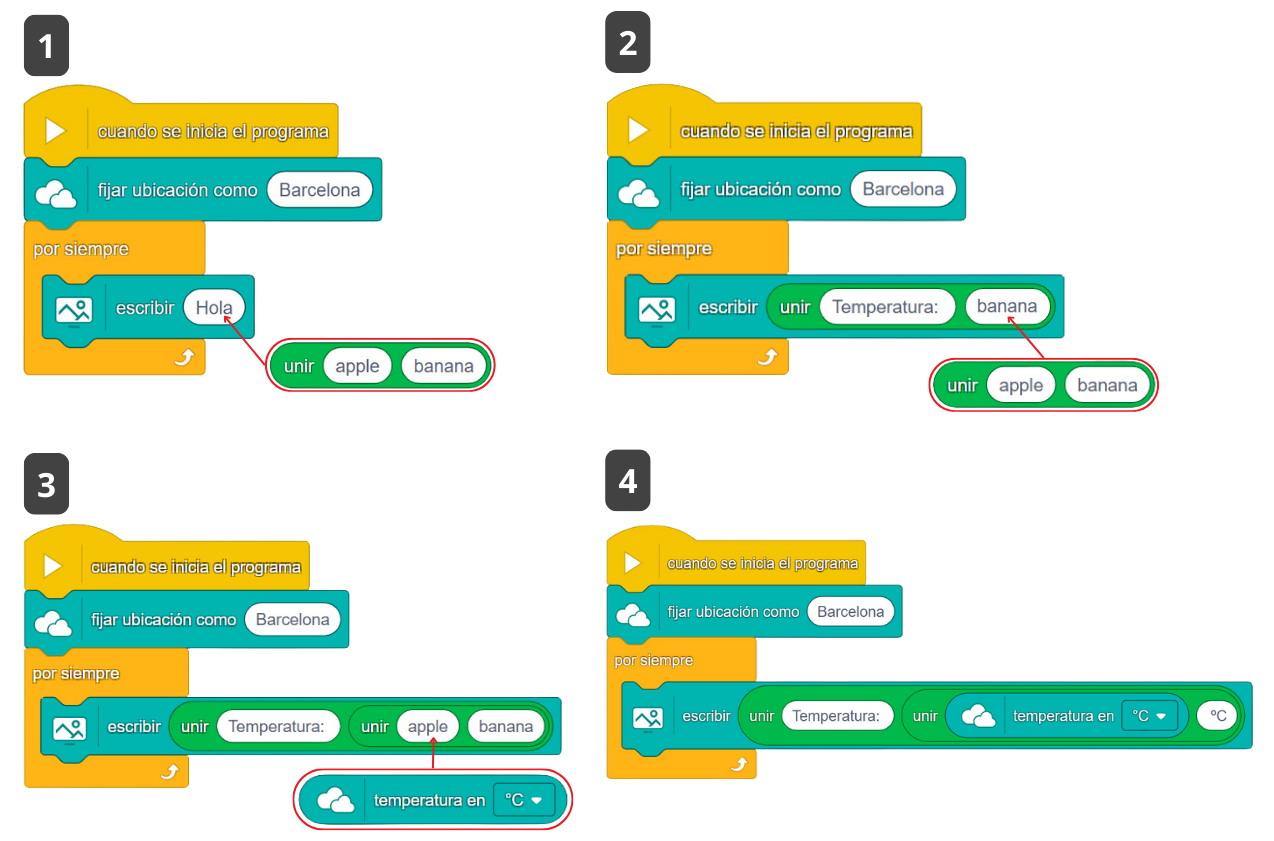
Per acabar, poseu un bloc d’espera de 3 segons:
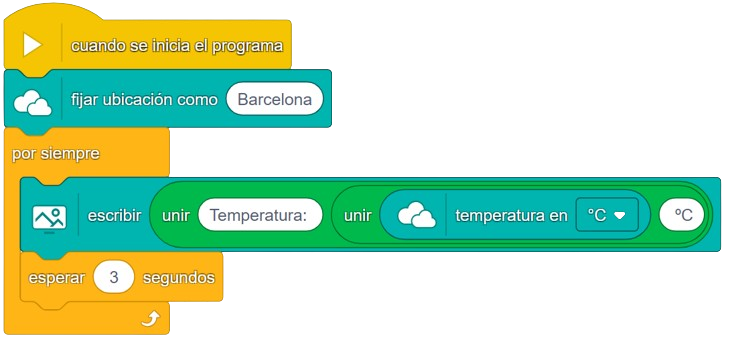
4. A continuació, feu el mateix procediment per mostrar la velocitat del vent.

5. Executeu el programa i veureu com s’alternen les dades a la pantalla:
💡 Proposta per treballar amb els blocs de clima
Us oferim una proposta per poder treballar a l’aula amb els blocs de clima.
Primera part: Recolliu en una taula, com la que podeu descarregar a sota, les mesures de temperatura, vent, precipitació i pressió atmosfèrica durant tots els dies d’una setmana. Feu-ho, aproximadament, a la mateixa hora.

Segona part: Les plantes xeldonianes tenen una particularitat: les seves llavors són molt sensibles a la temperatura i només arrelaran i faran fruits si hem plantat la llavor amb les condicions correctes de temperatura.
El Max i la Lluna han portat llavors d’algunes plantes xeldonianes i us les han fet arribar. Seguint la taula de condicions que poden suportar les llavors xeldonianes, i tenint en compte la temperatura d’aquests dies a la vostra localitat, quines plantes de Xeldon plantarieu a la vostra població perquè creixin sense problemes?


Si no hi ha cap d’aquestes fruites que us pugui servir per plantar-la a la vostra població, inventeu-ne una de nova que compleixi les condicions.
Tercera part: Per acabar, utilitzeu aquesta plantilla de full de càlcul, per dibuixar les gràfiques de les dades ambientals que heu enregistat durant la setmana.
Aquesta vegada, el repte que us proposem consisteix a fer un hivernacle que es pugui ventilar quan la calor a dins sigui massa alta, o que es pugui tancar si està obert i a l’interior la temperatura és massa baixa.
🔸 Construcció de l’hivernacle
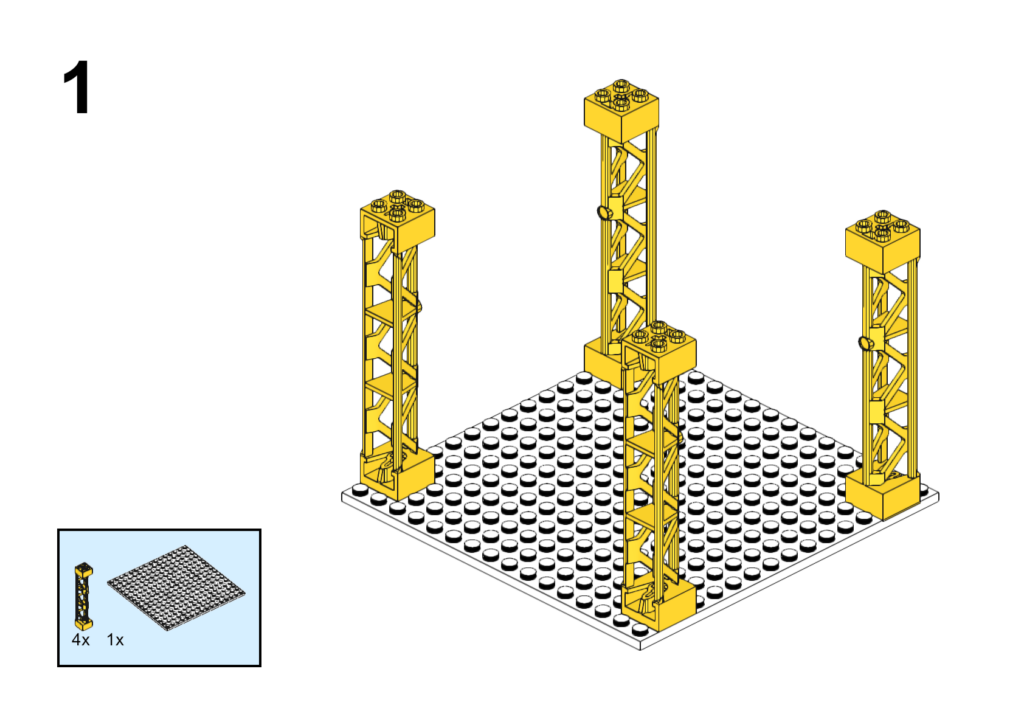
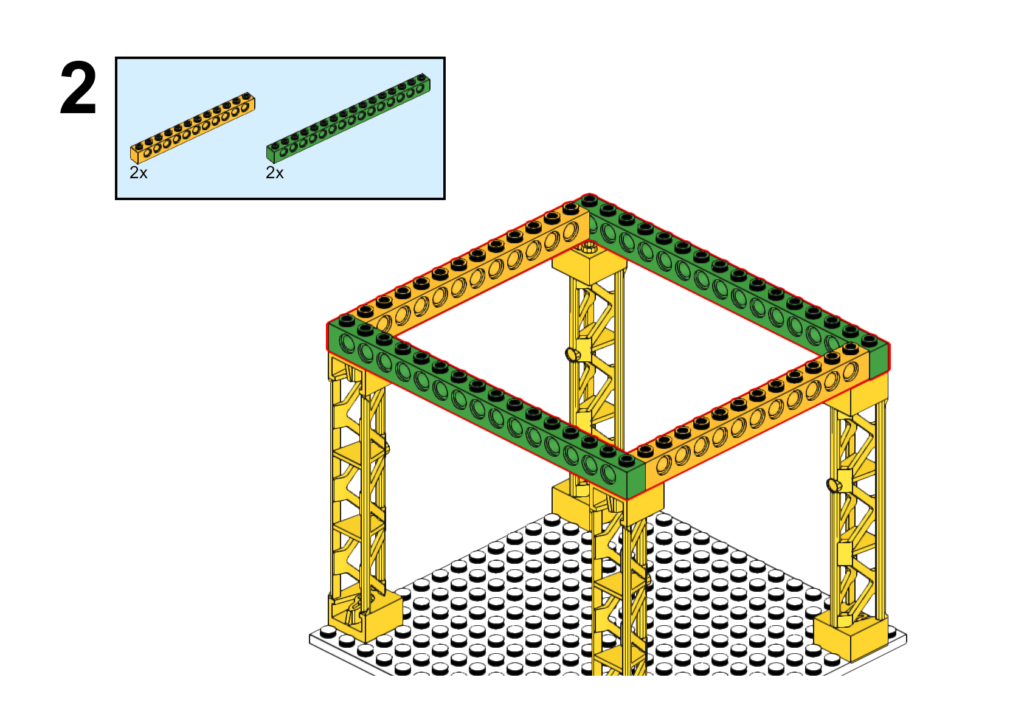
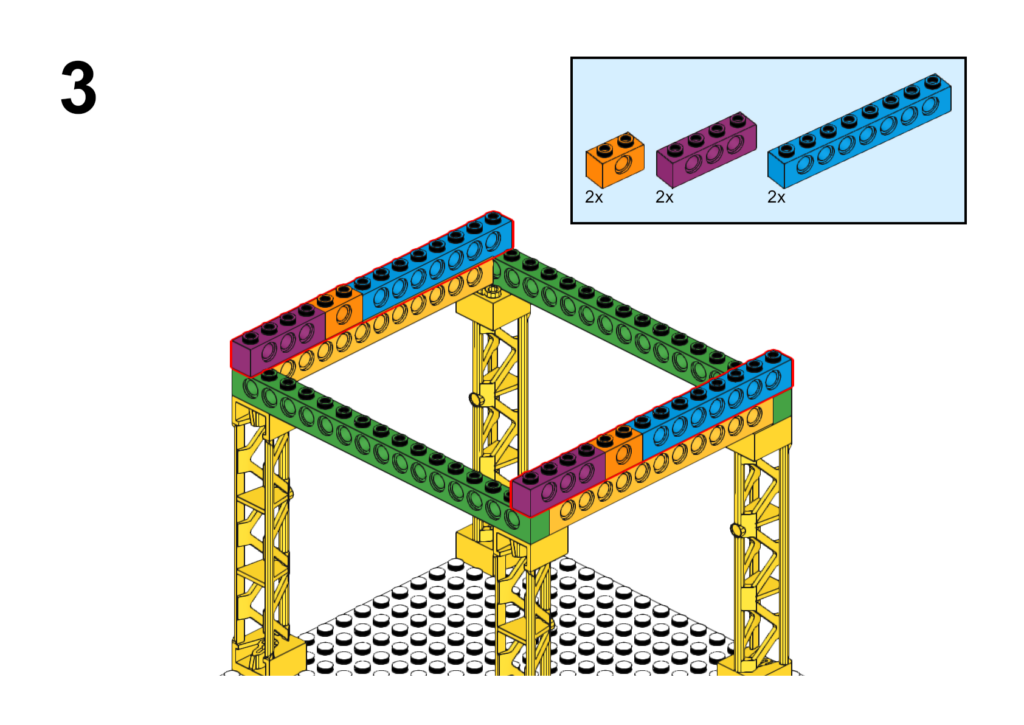
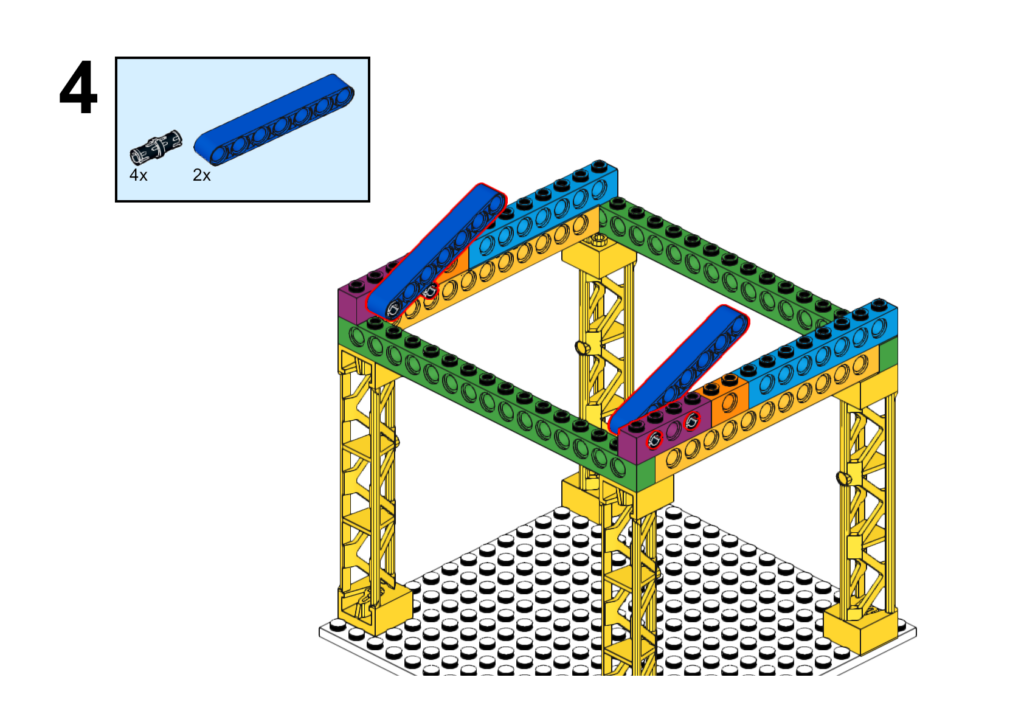
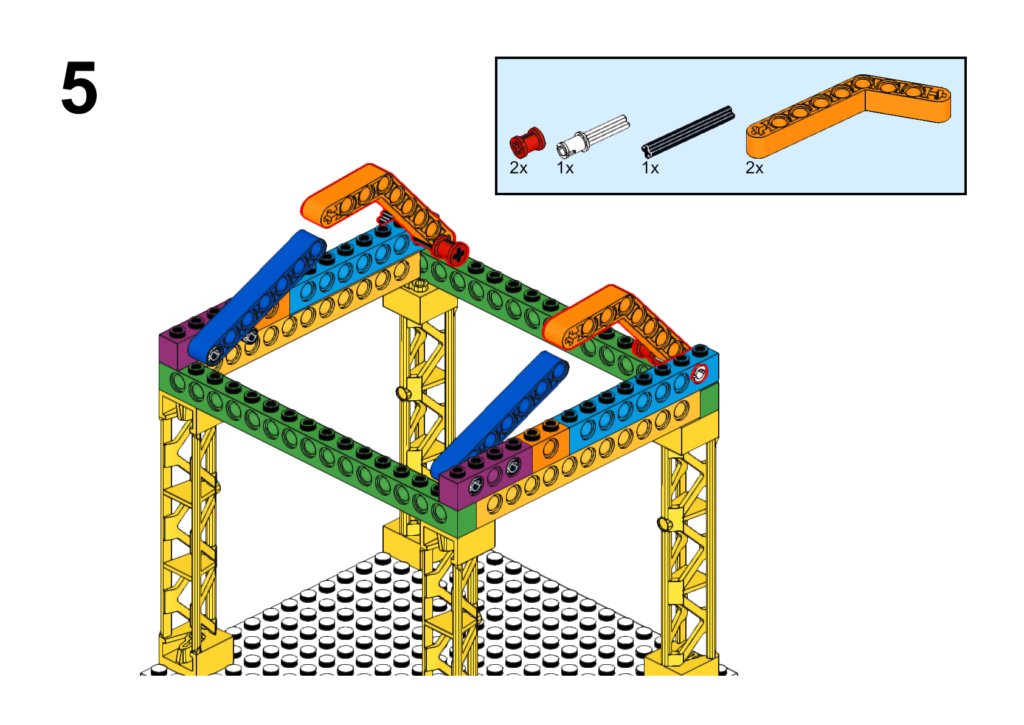
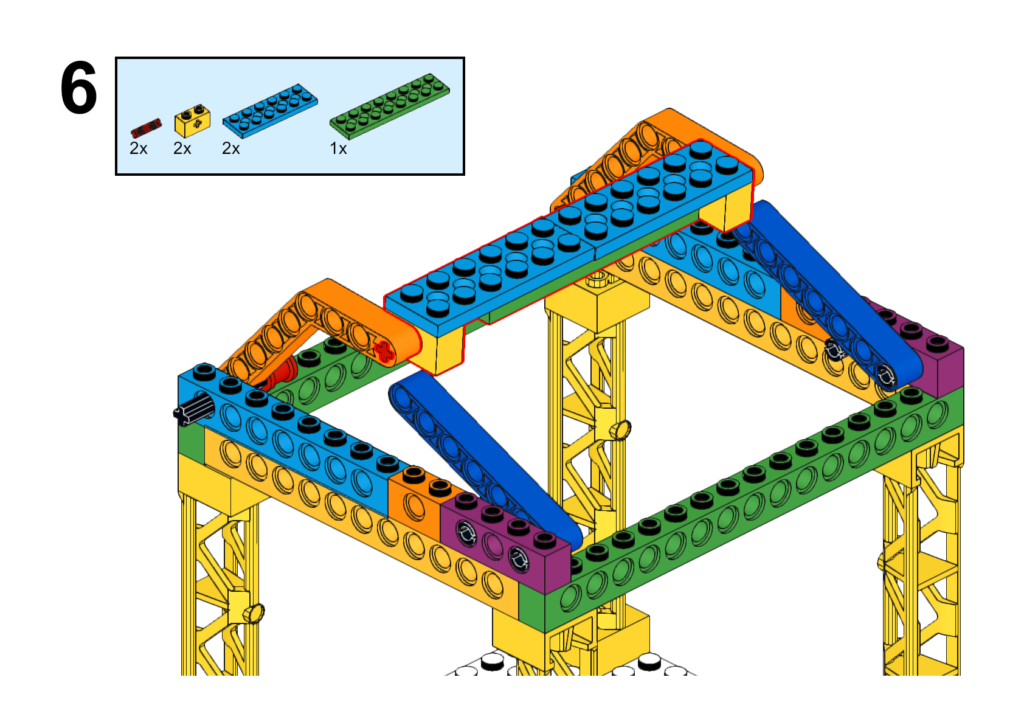
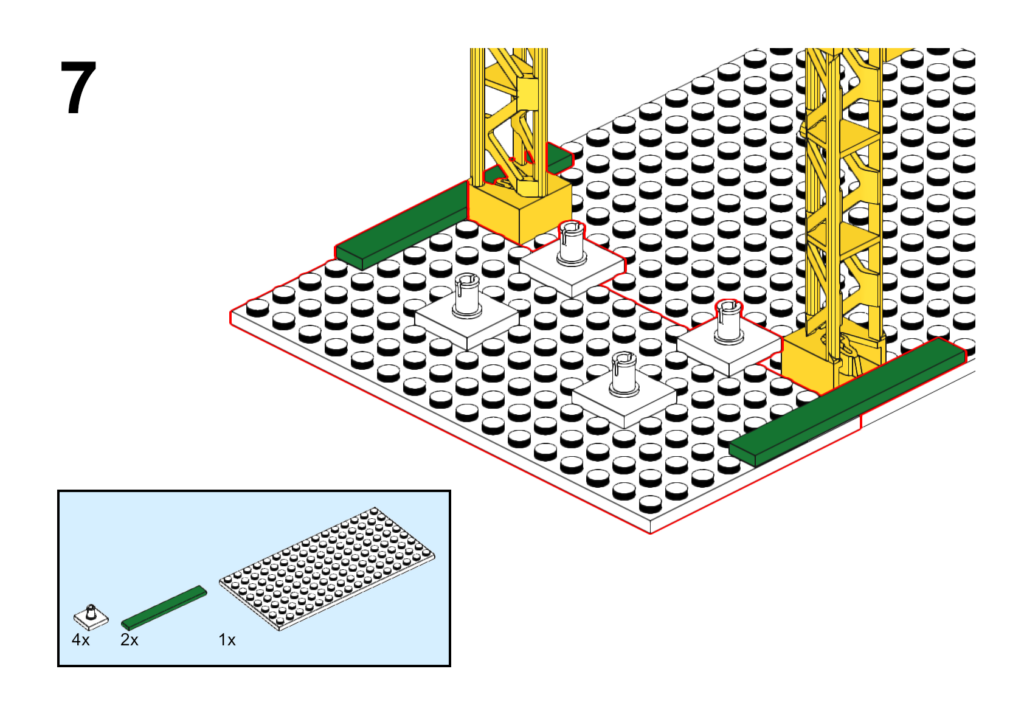
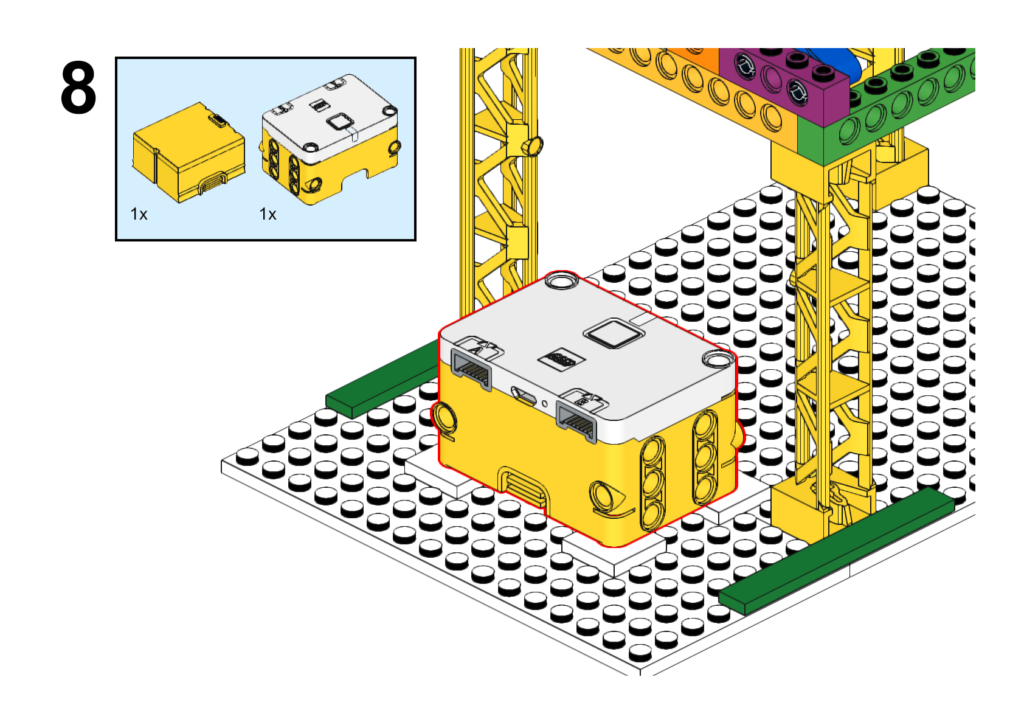
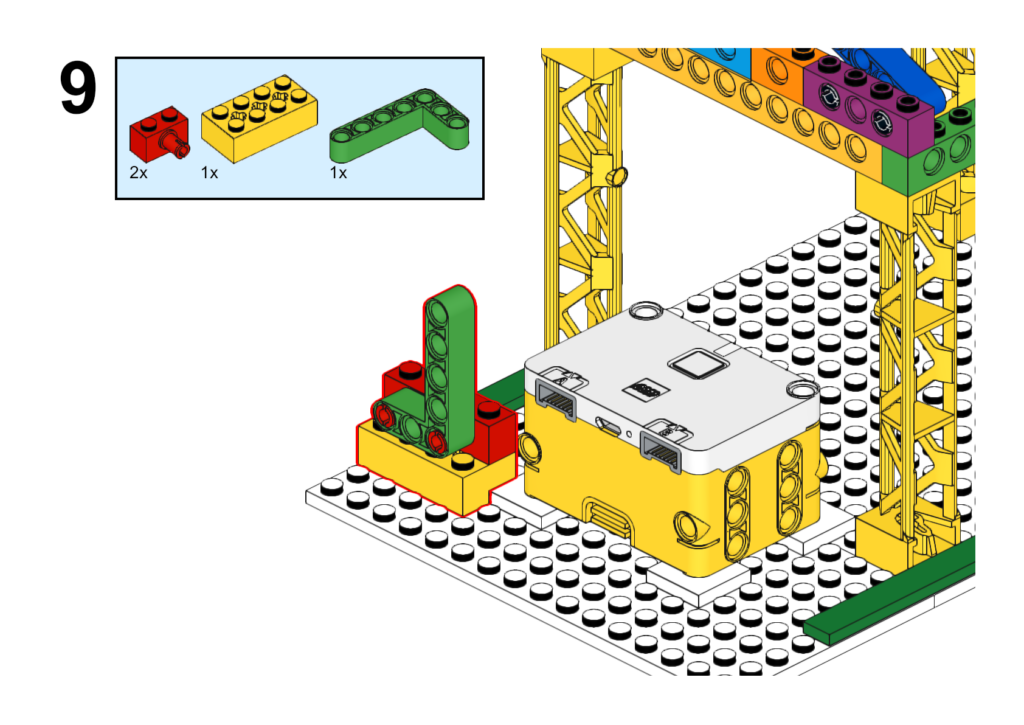
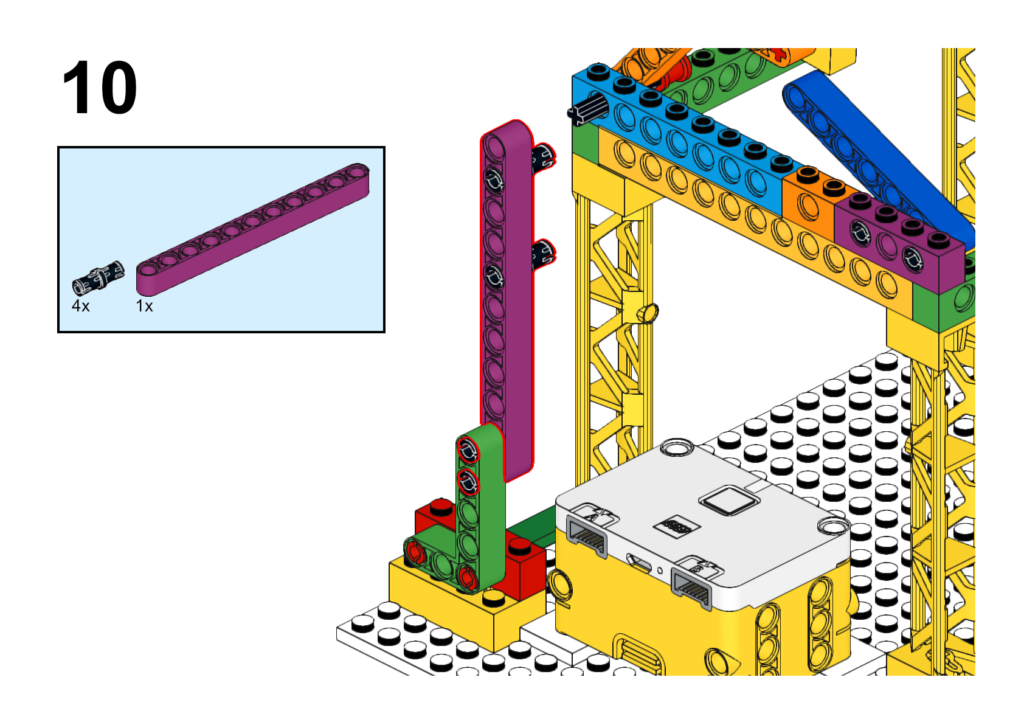
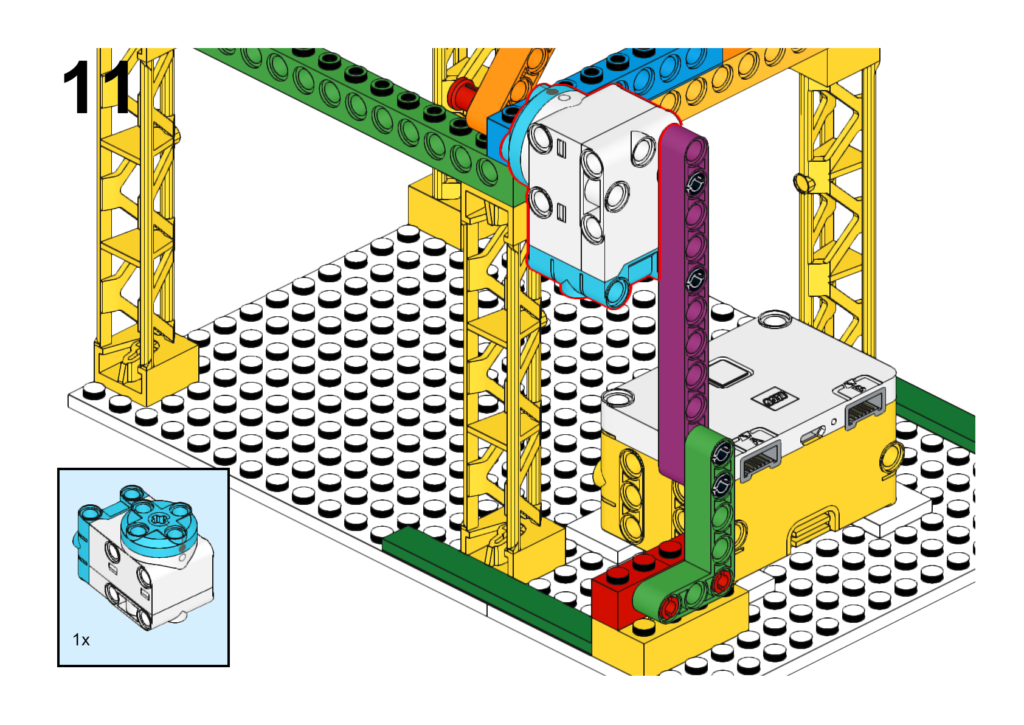
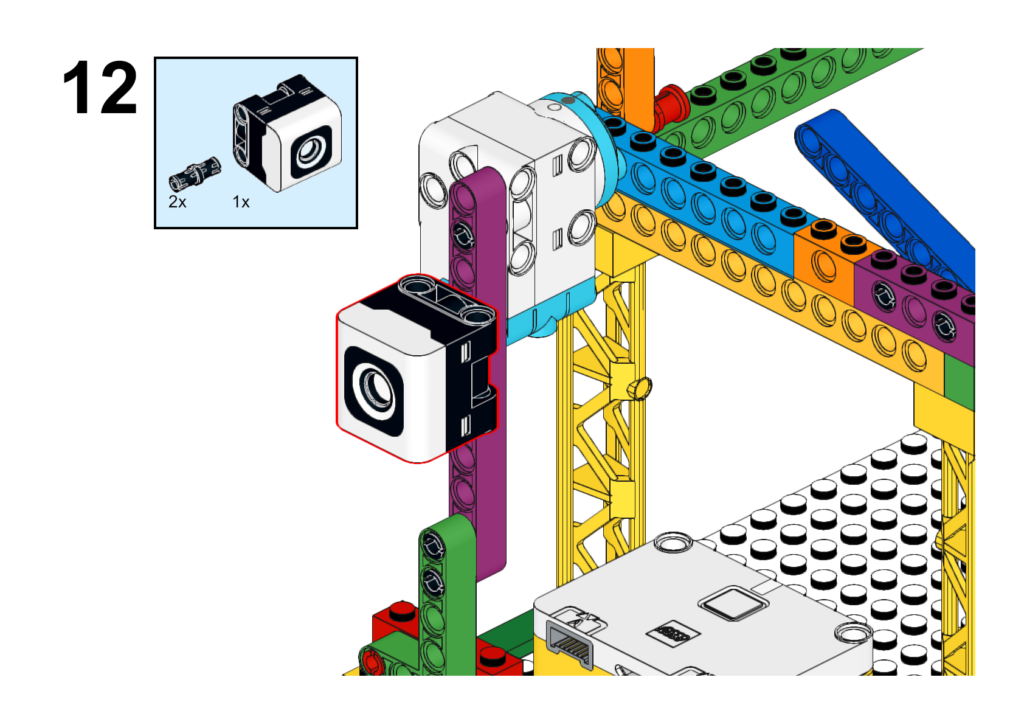
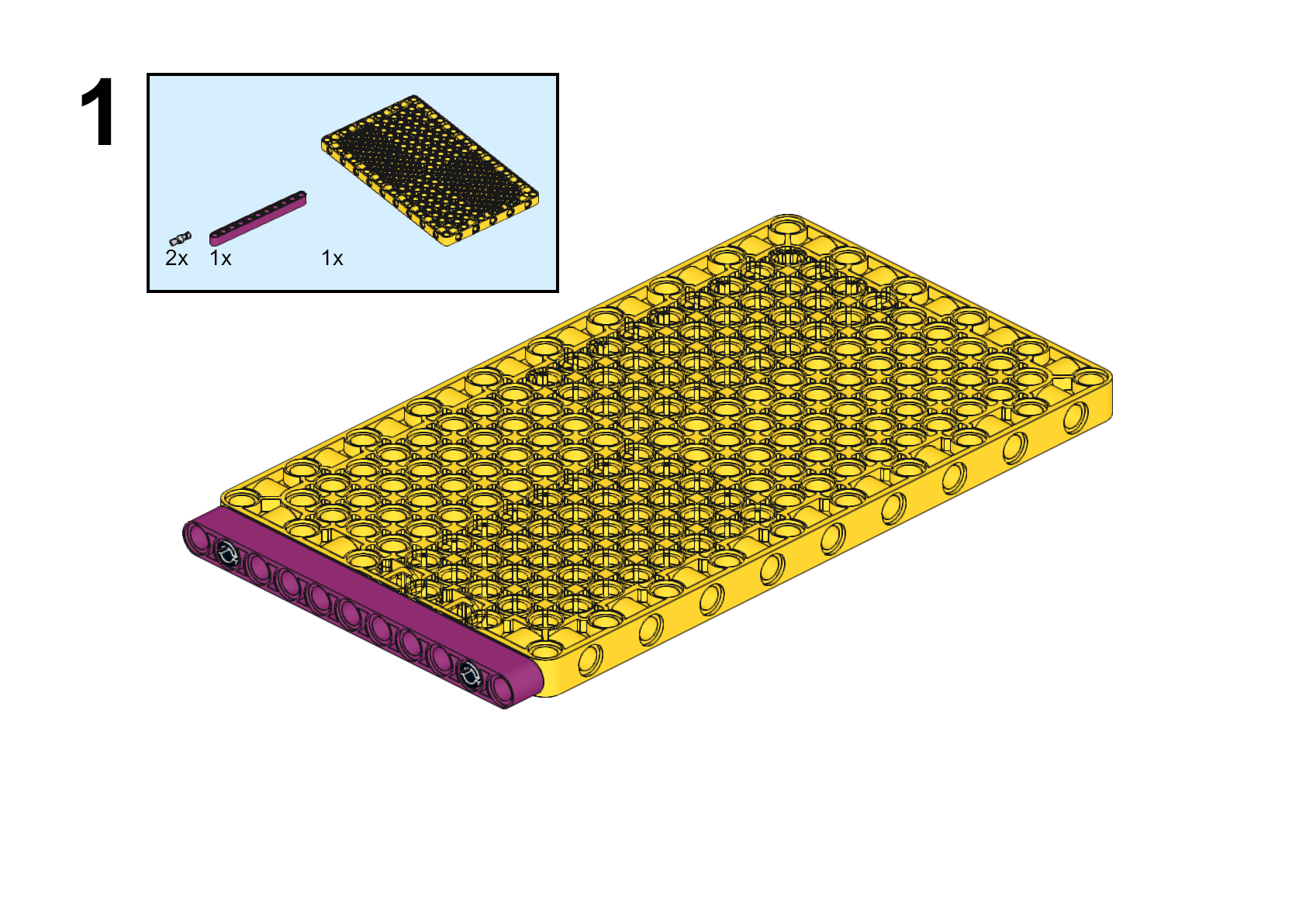
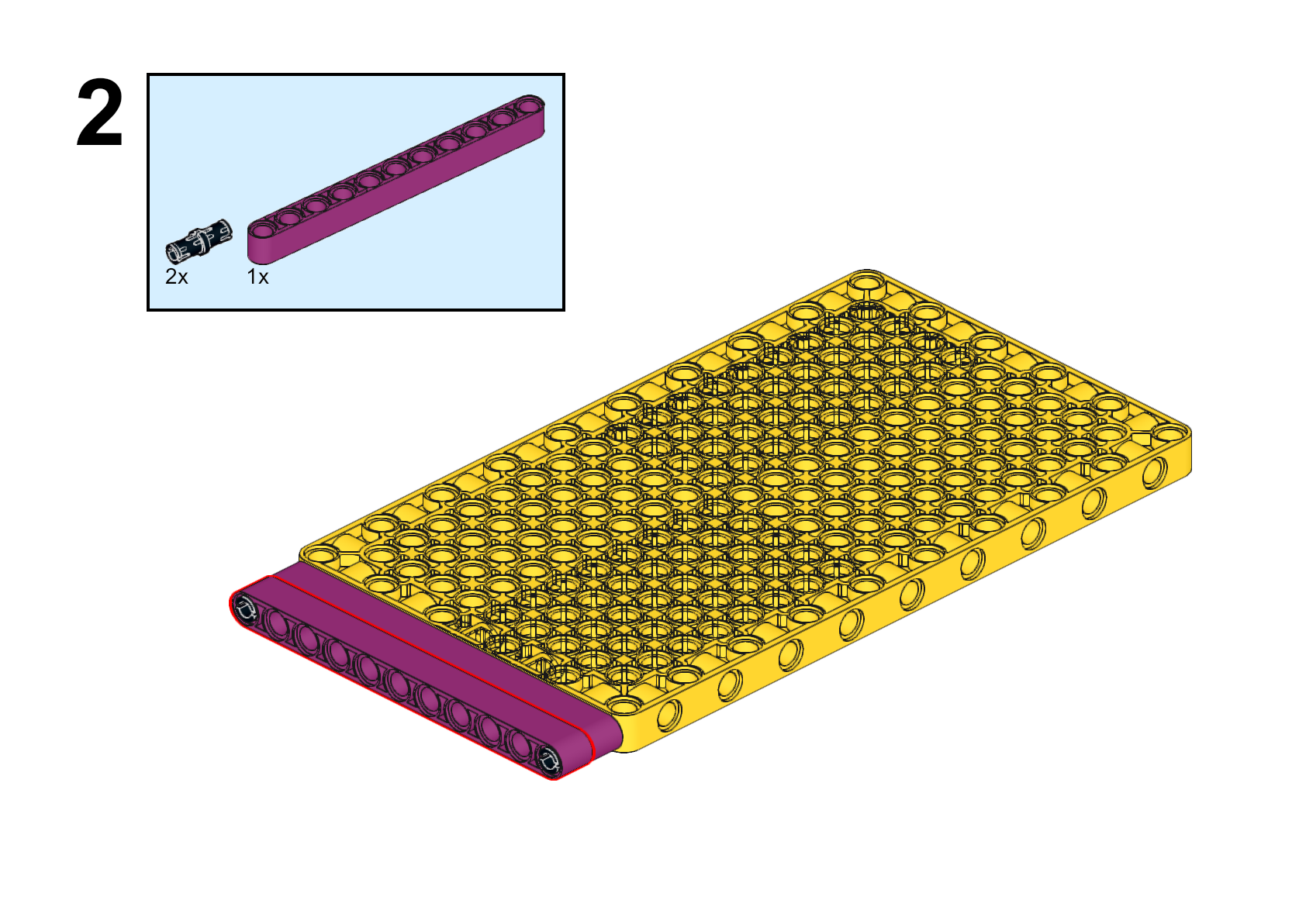
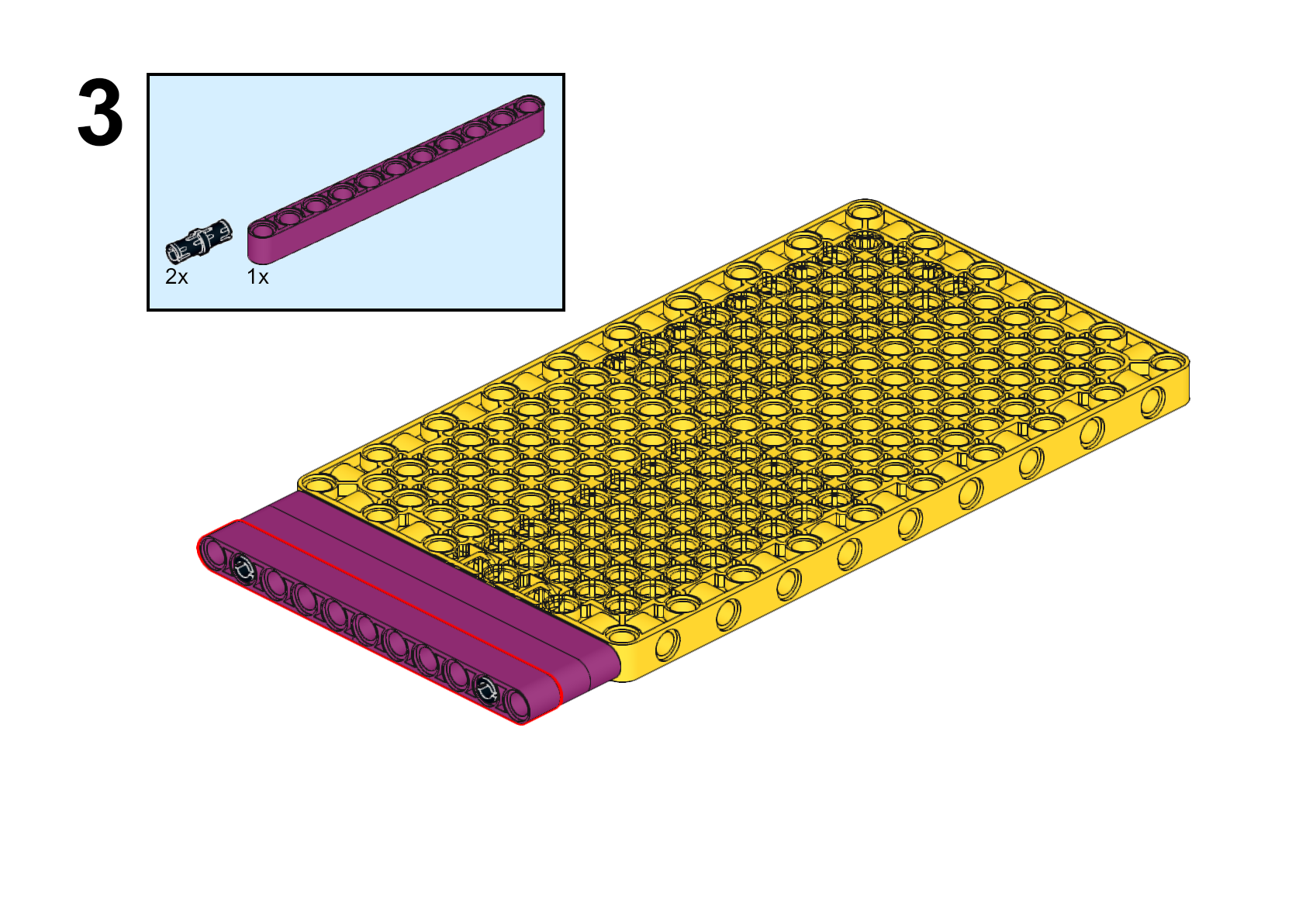
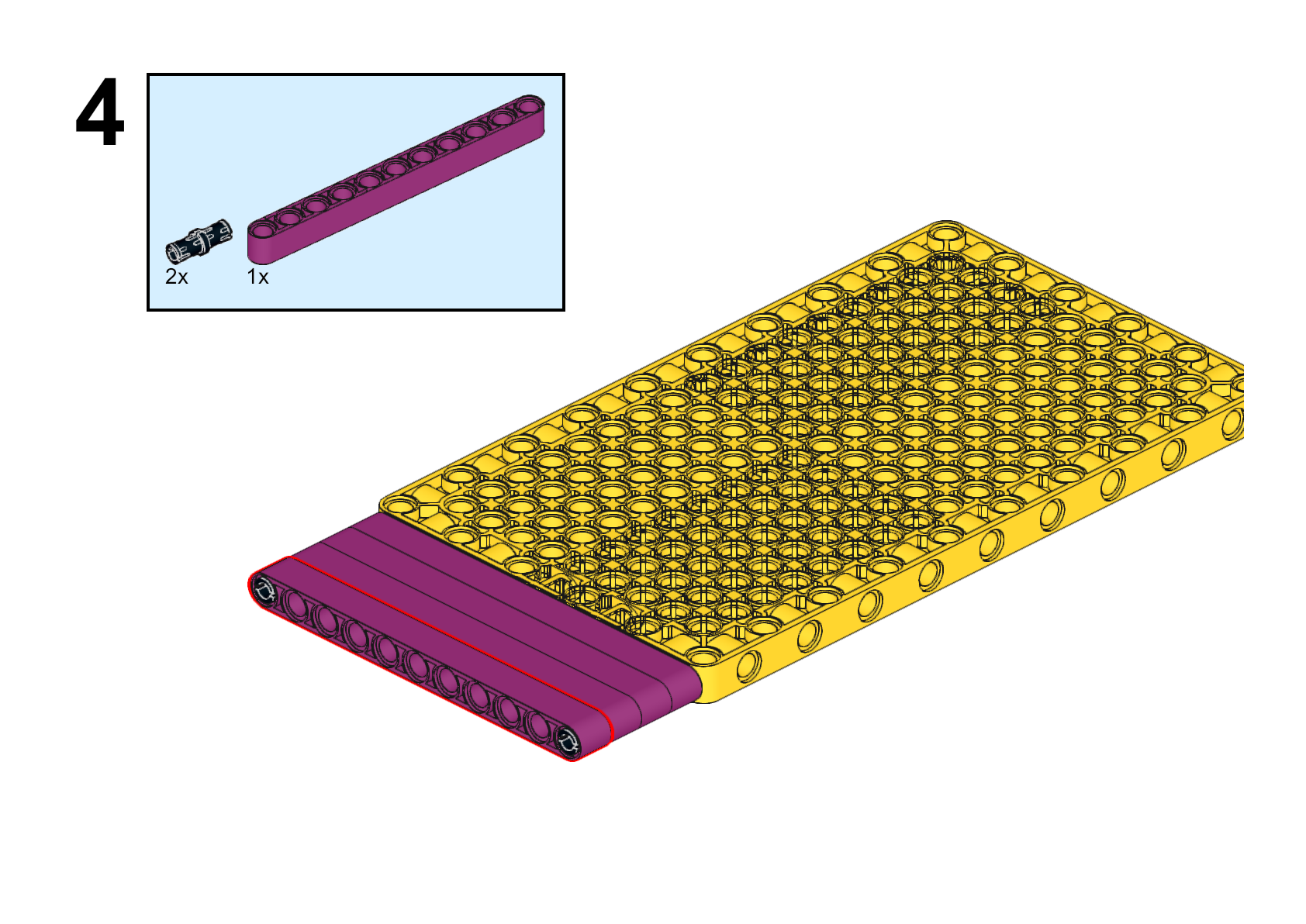
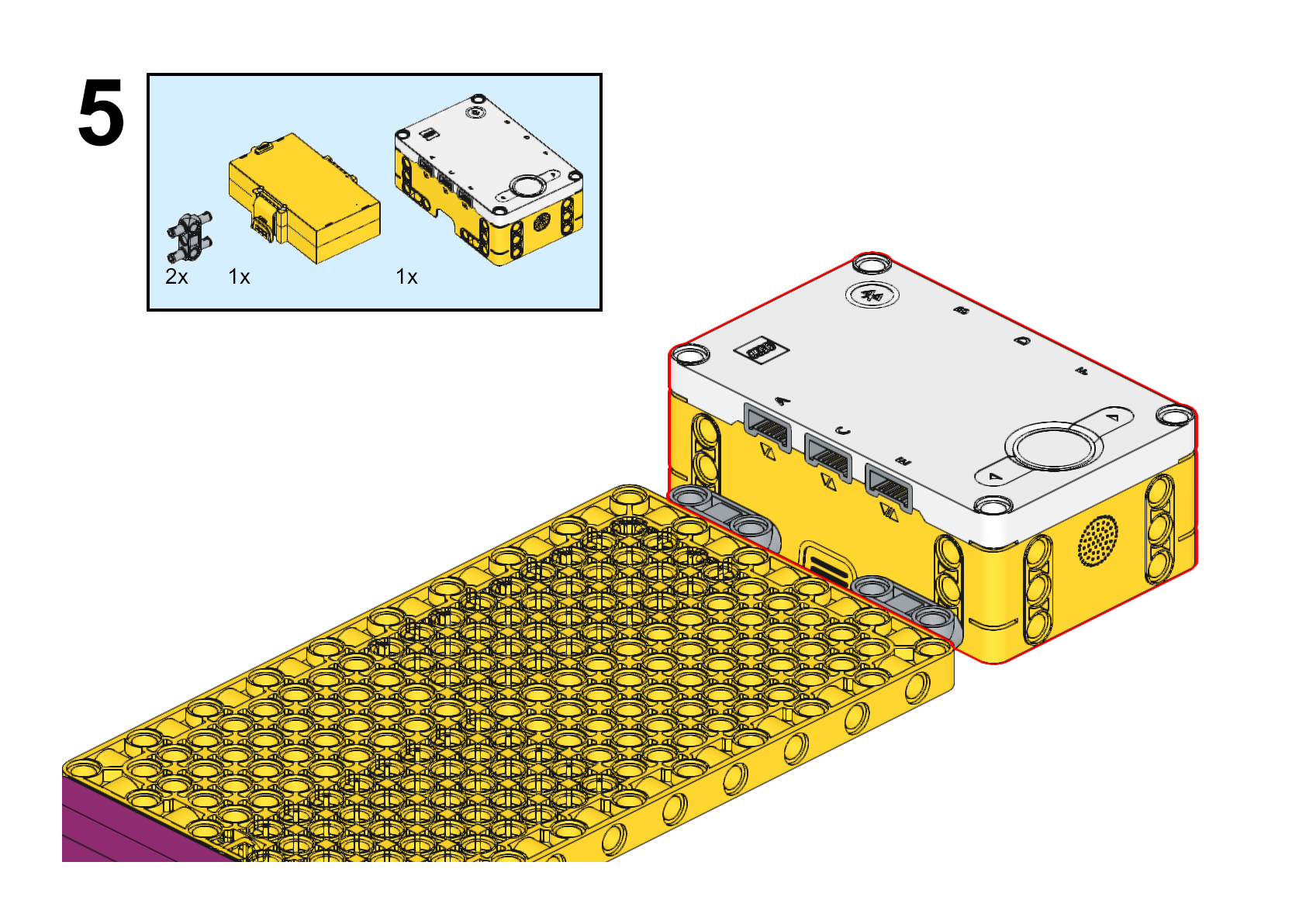
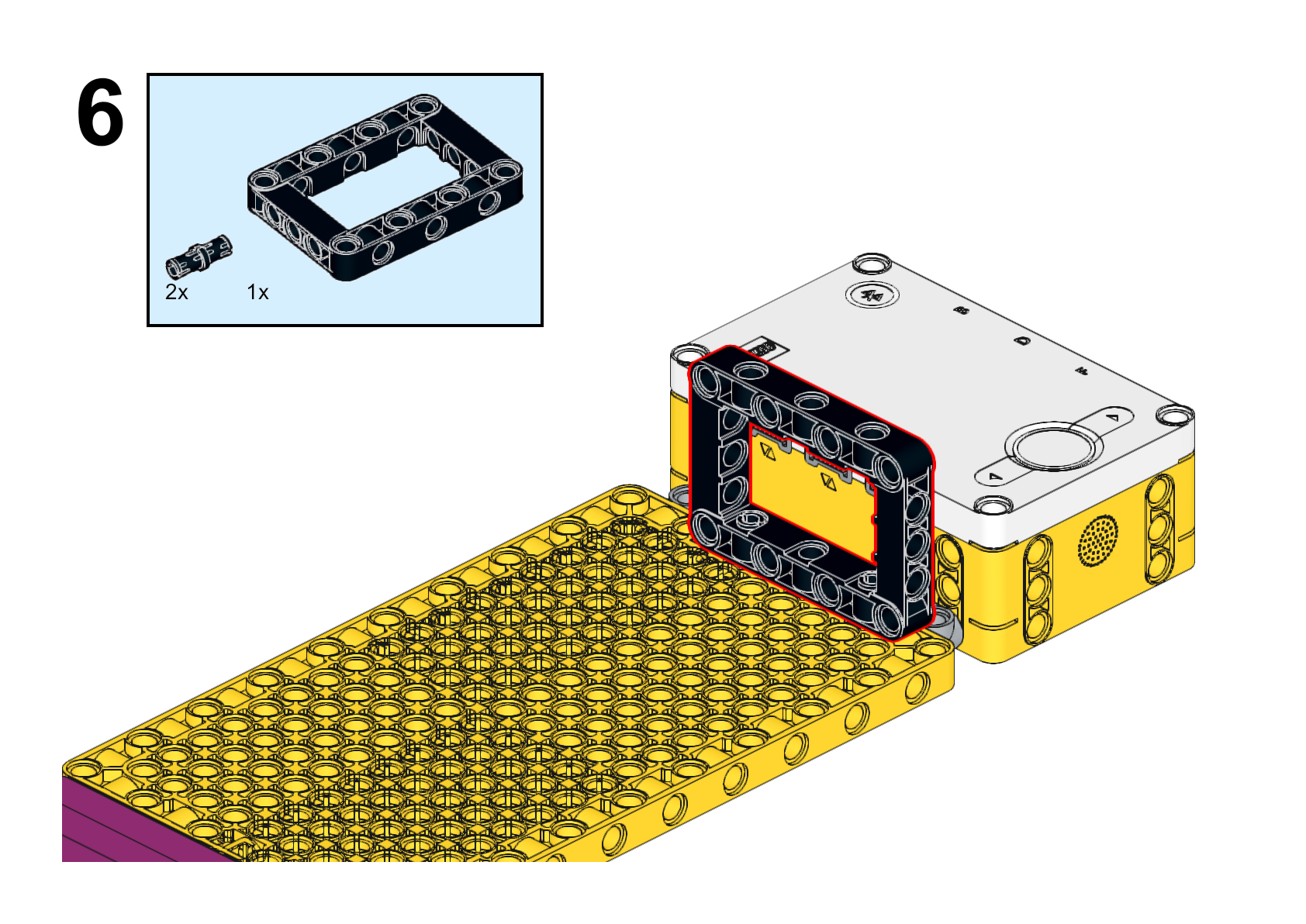
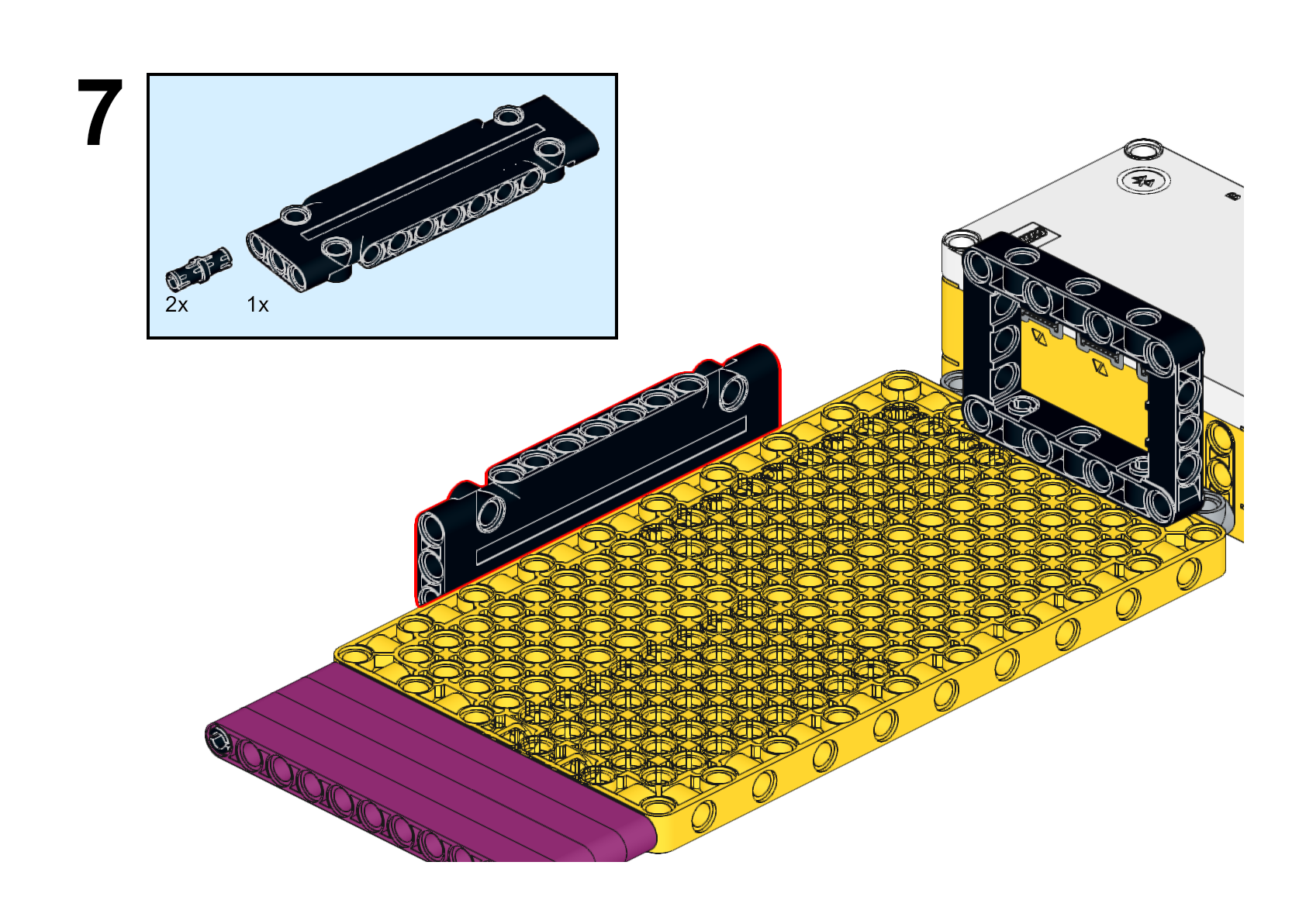
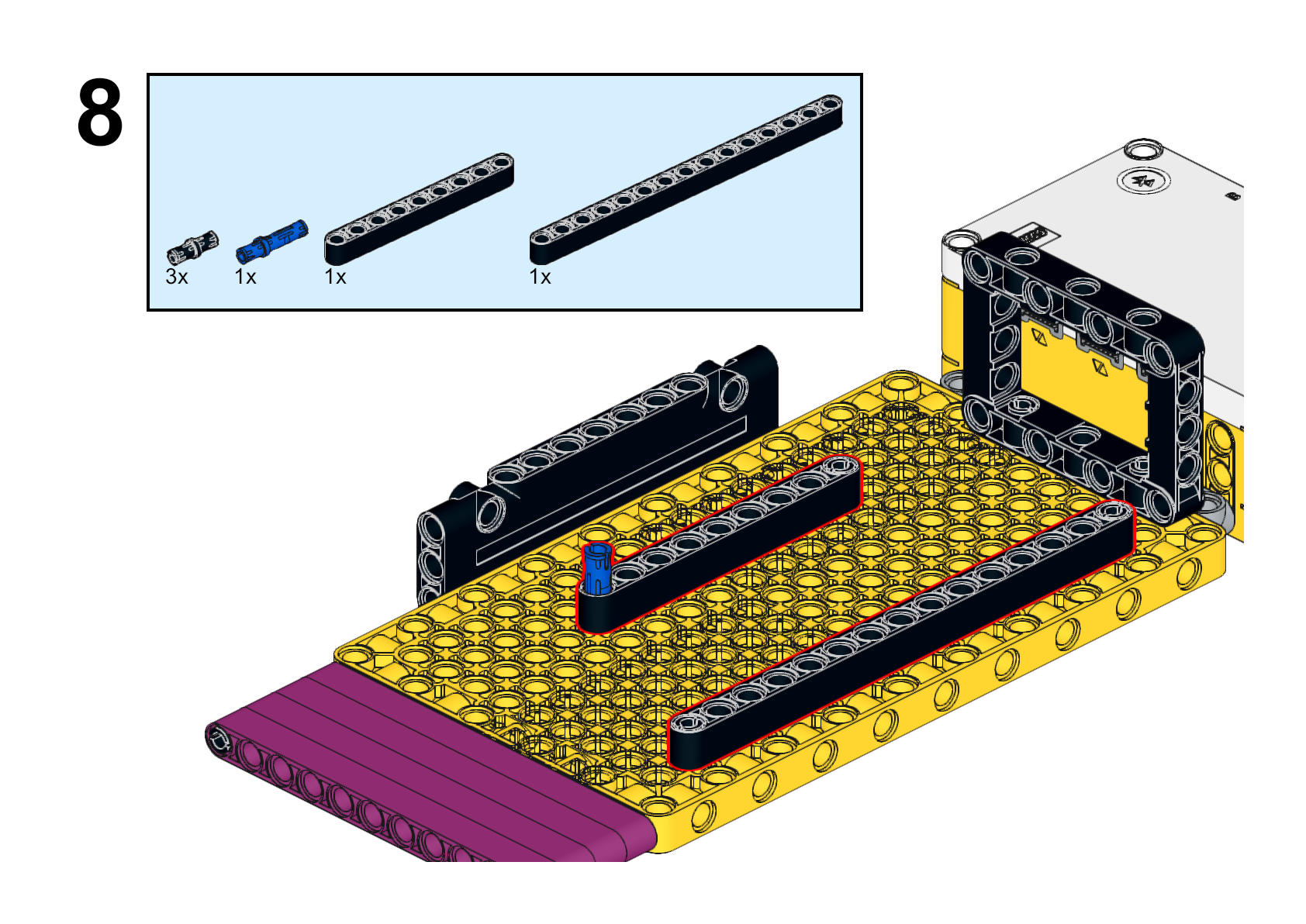
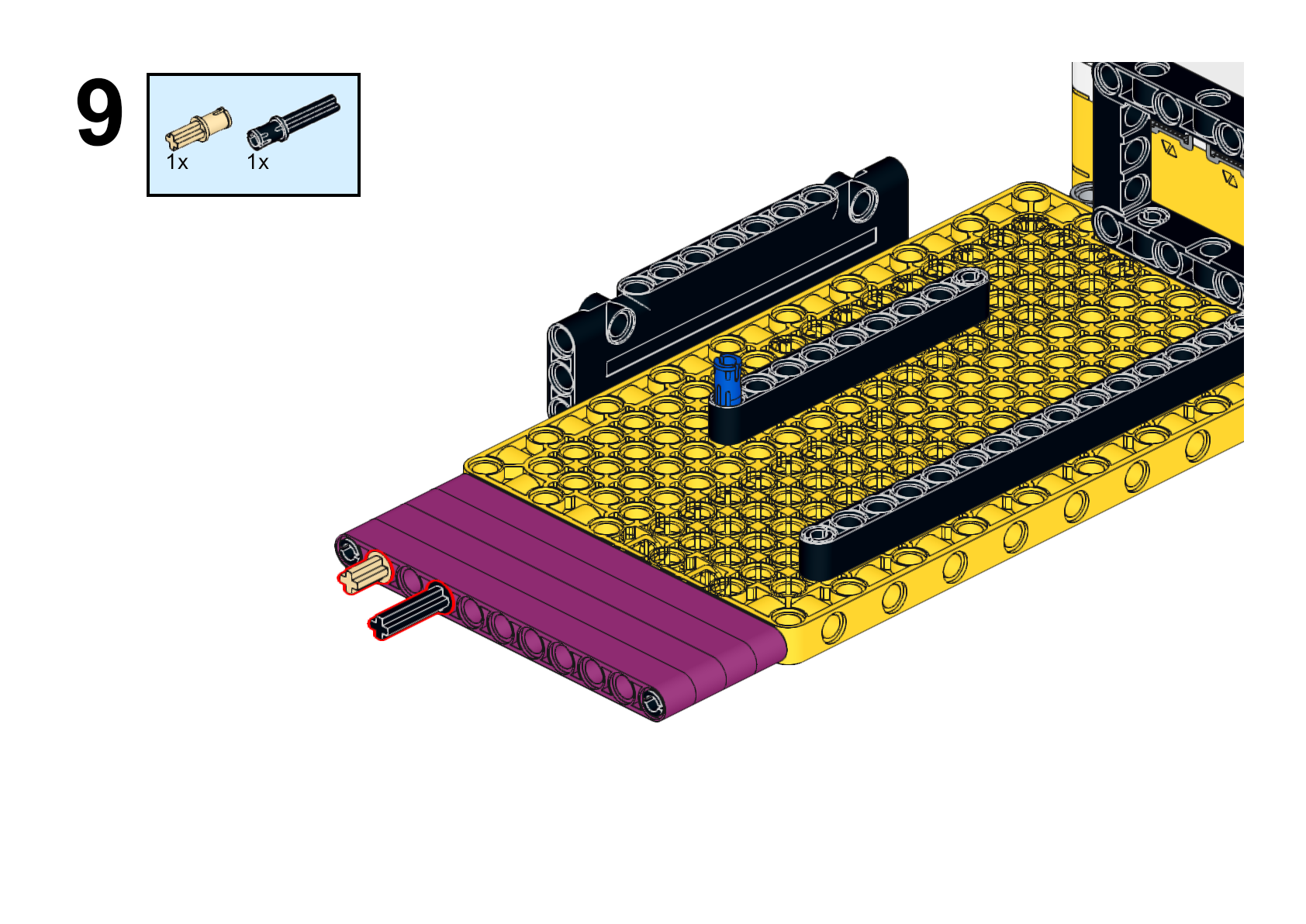
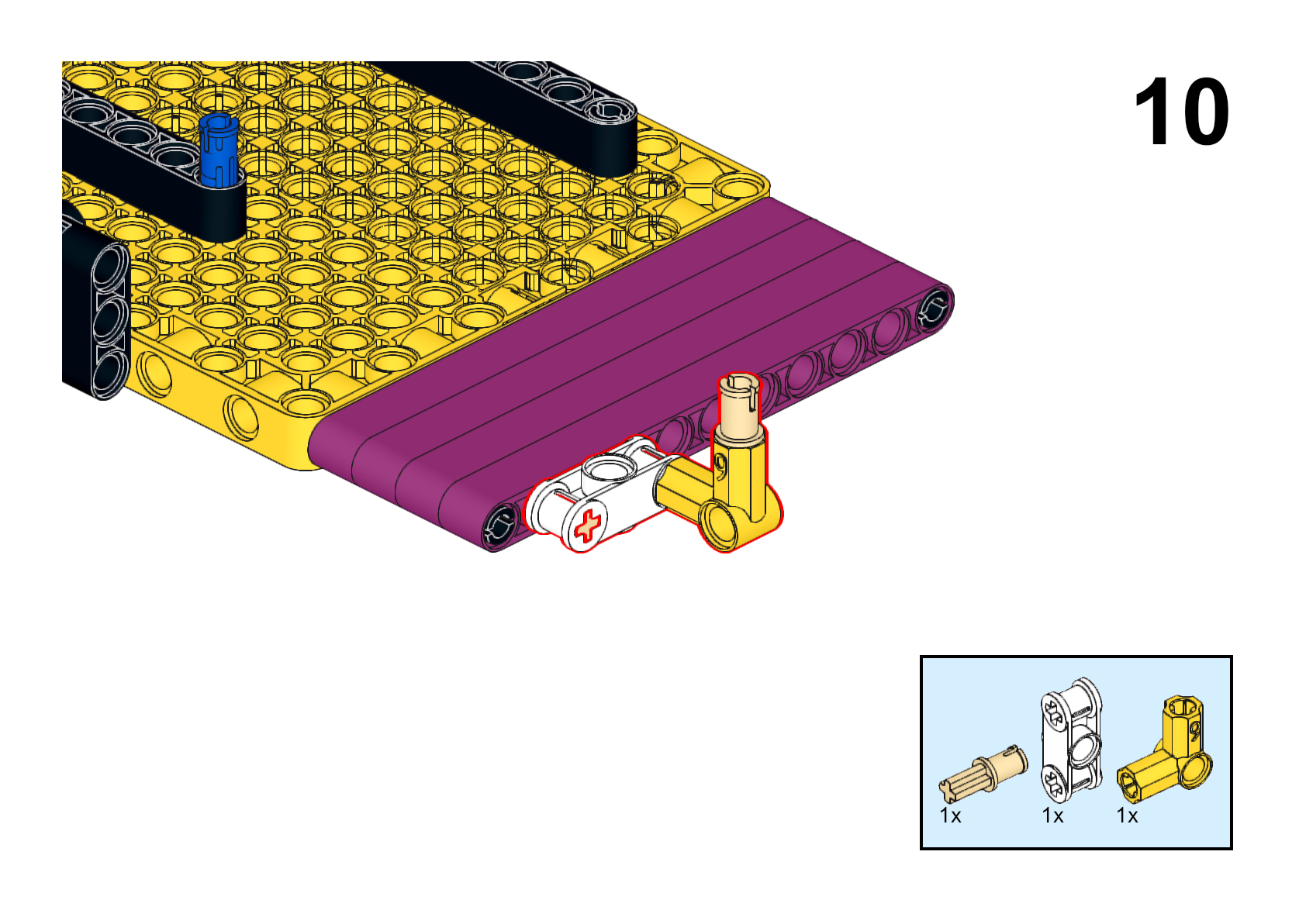
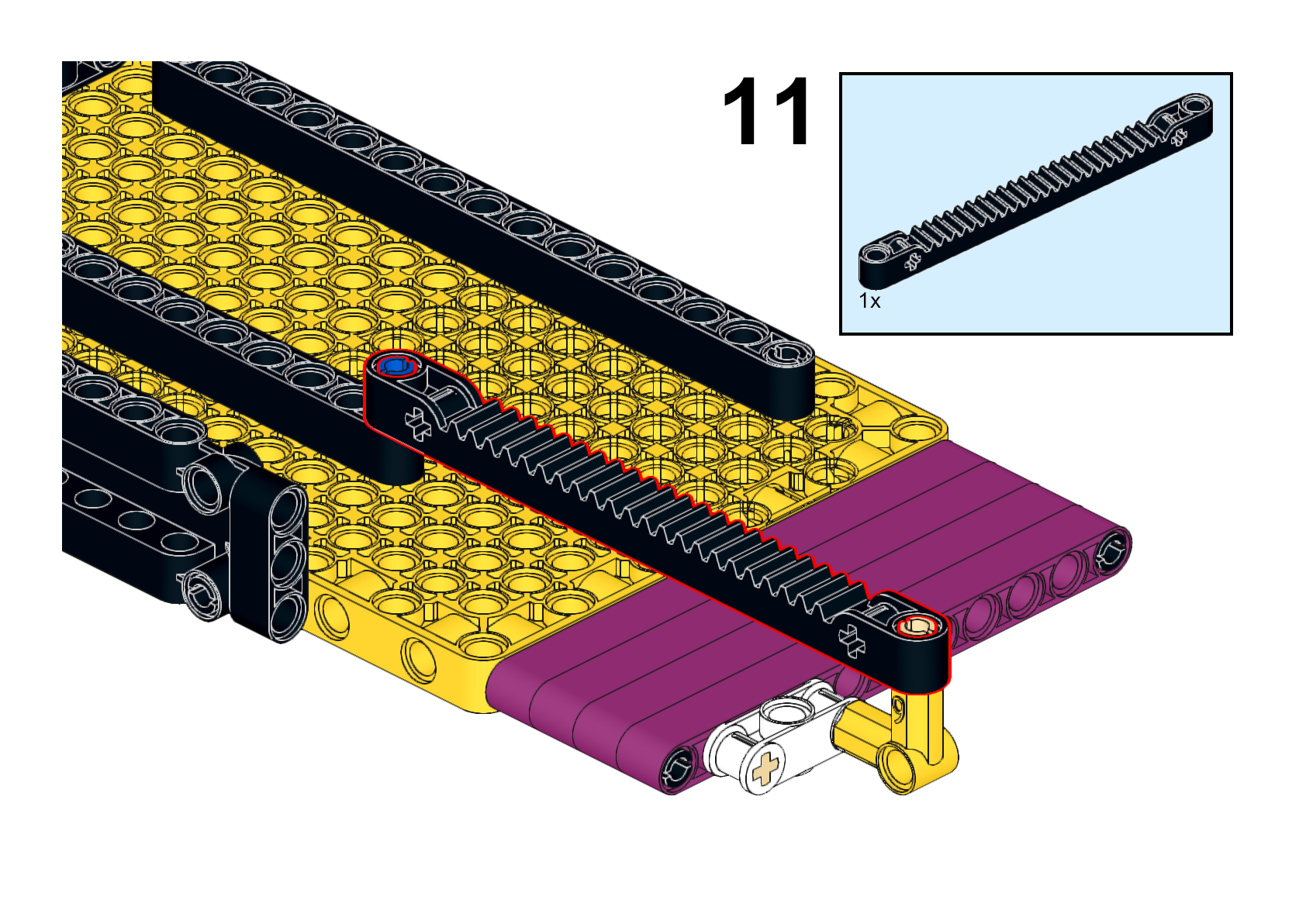
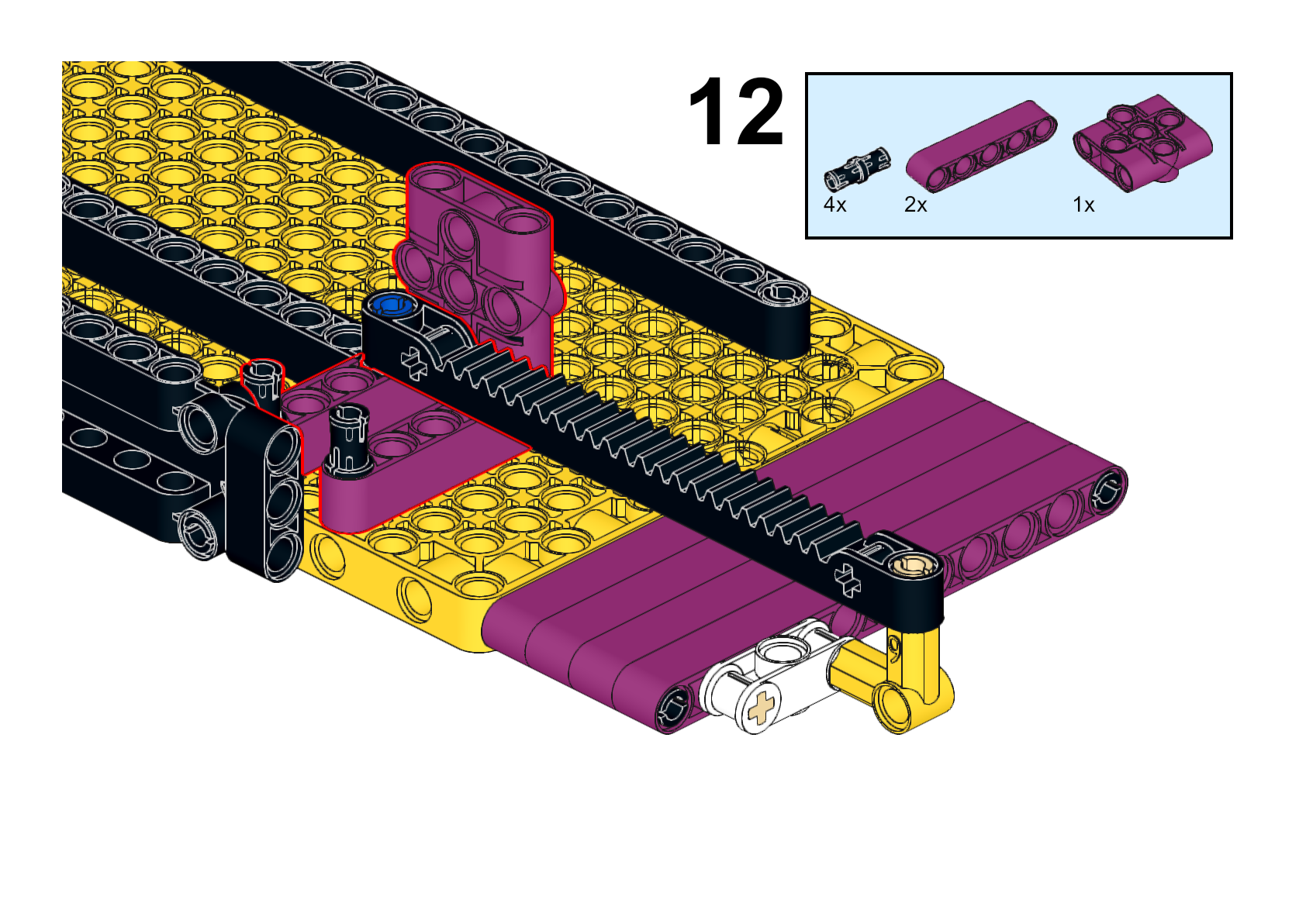
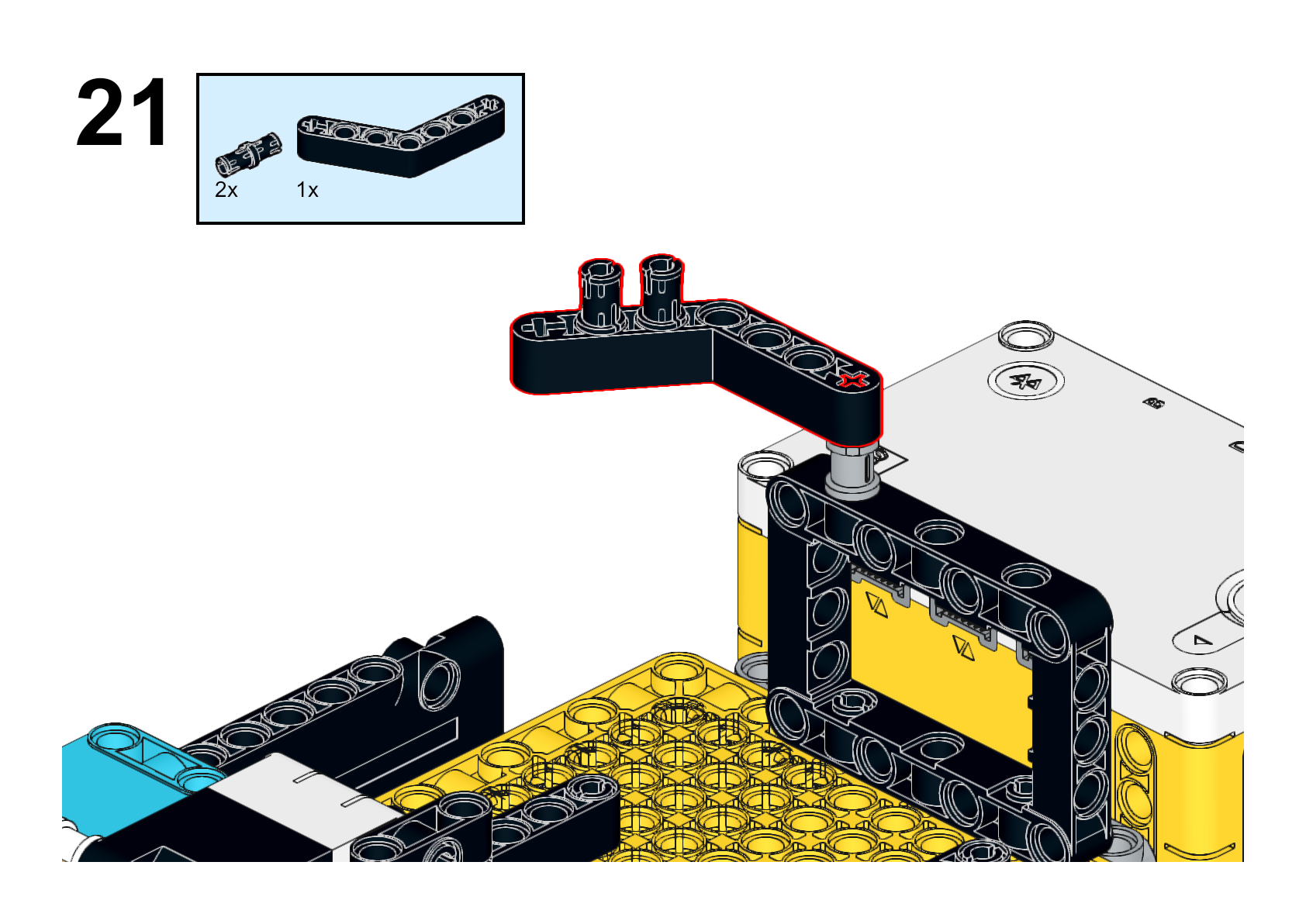
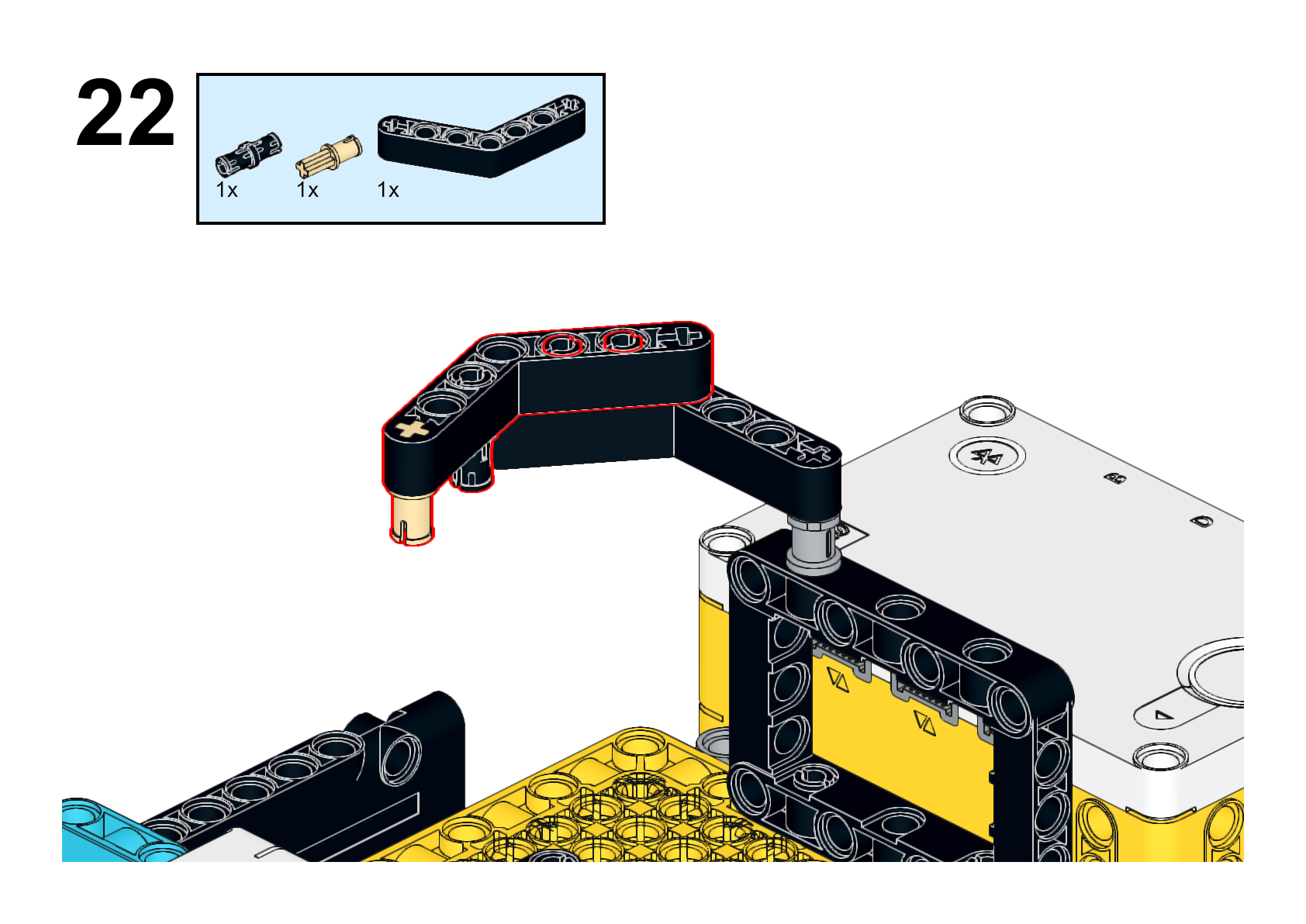
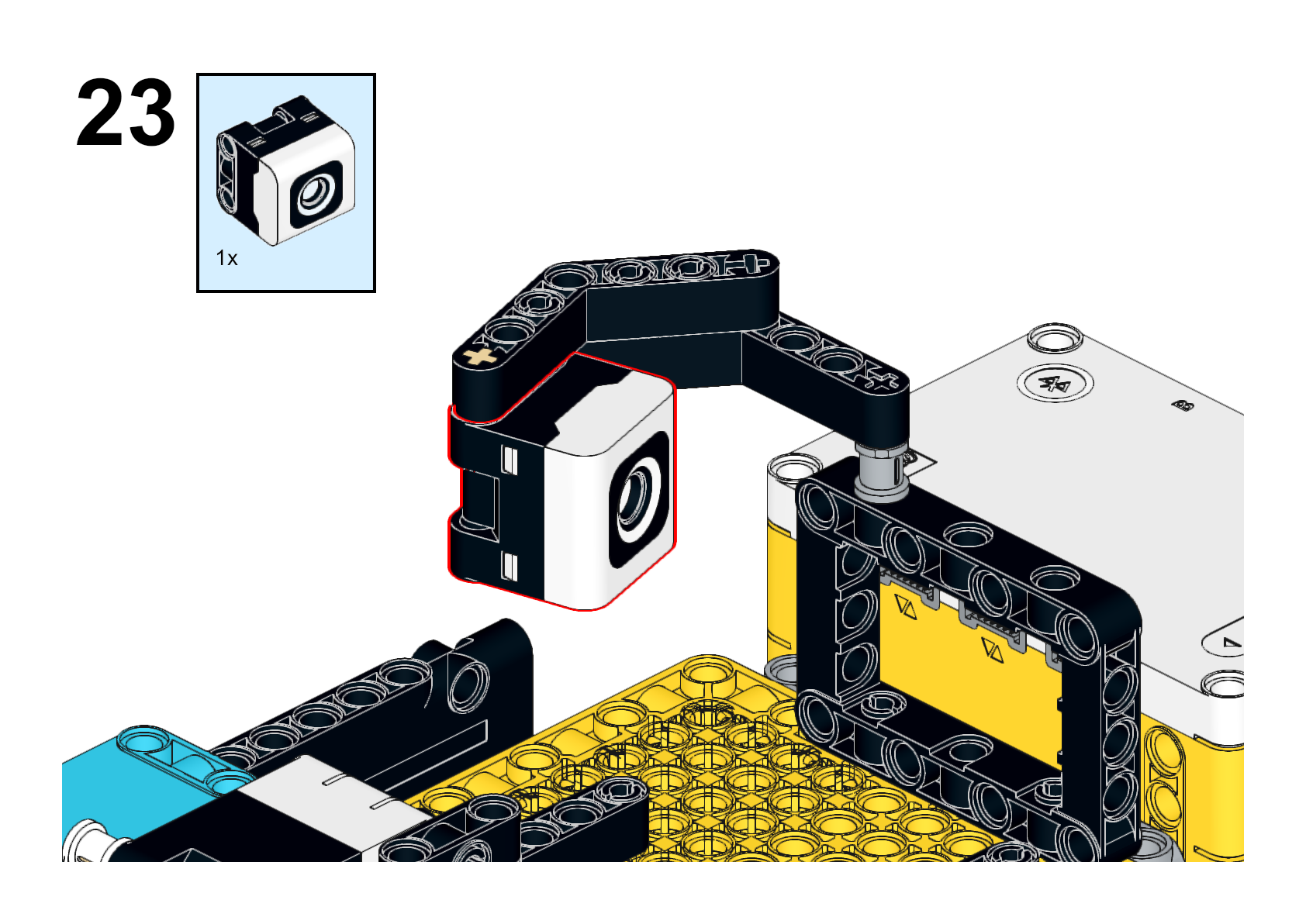
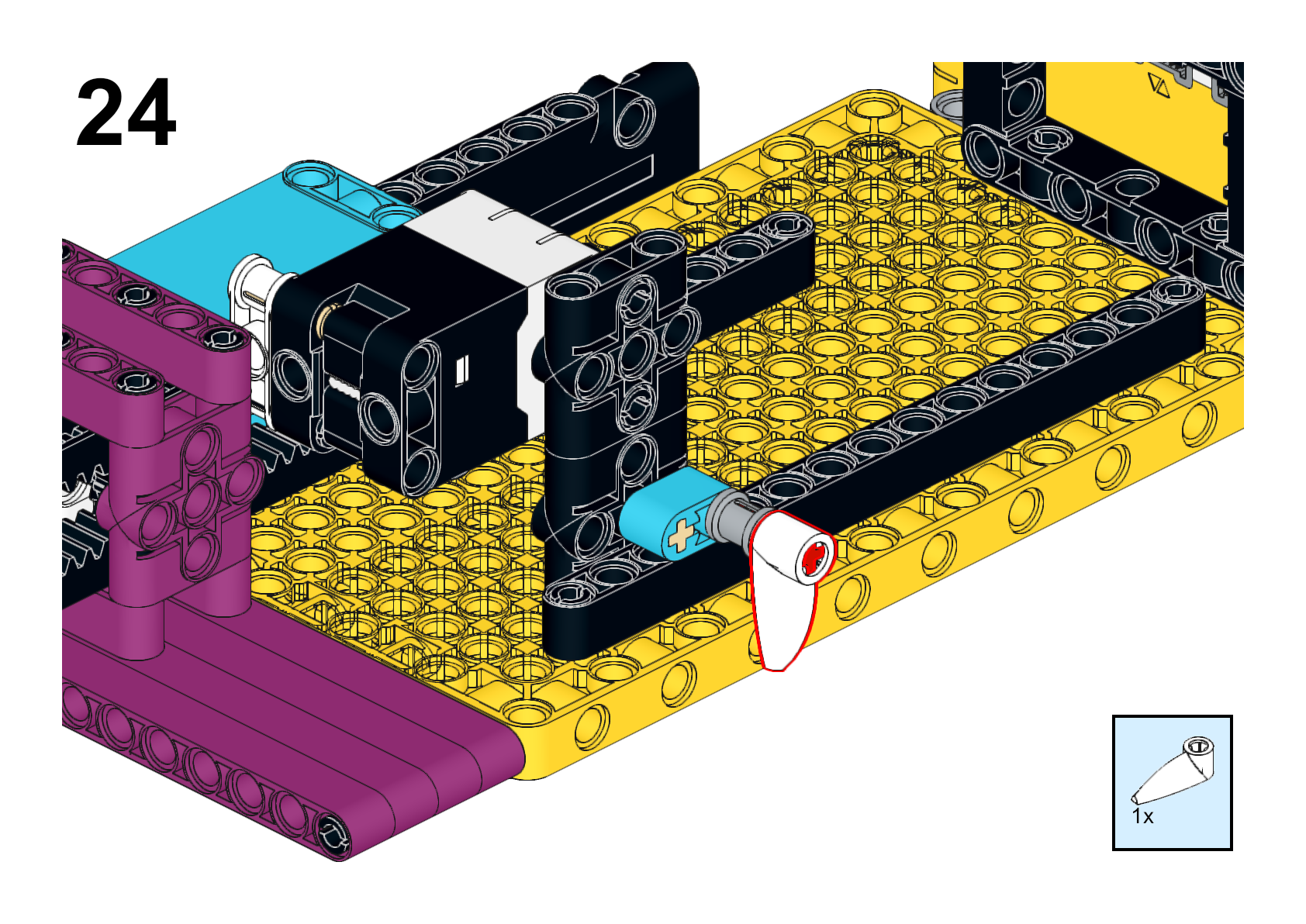
Pas a pas per fer l’hivernacle
Com sempre, el disseny del vostre hivernacle, és lliure, però, com a exemple, us deixem una guia pas a pas per poder muntar un hivernacle com el de la imatge:

Pas a pas per muntar l’hivernacle:
💡 Si voleu, podeu cobrir l’hivernacle amb paper film transparent, per simular millor el funcionament real d’un hivernacle.
Recordeu que aquest és un repte lliure i podeu fer altres construccions. Sigueu creatius!
🔸 Programació de l’hivernacle
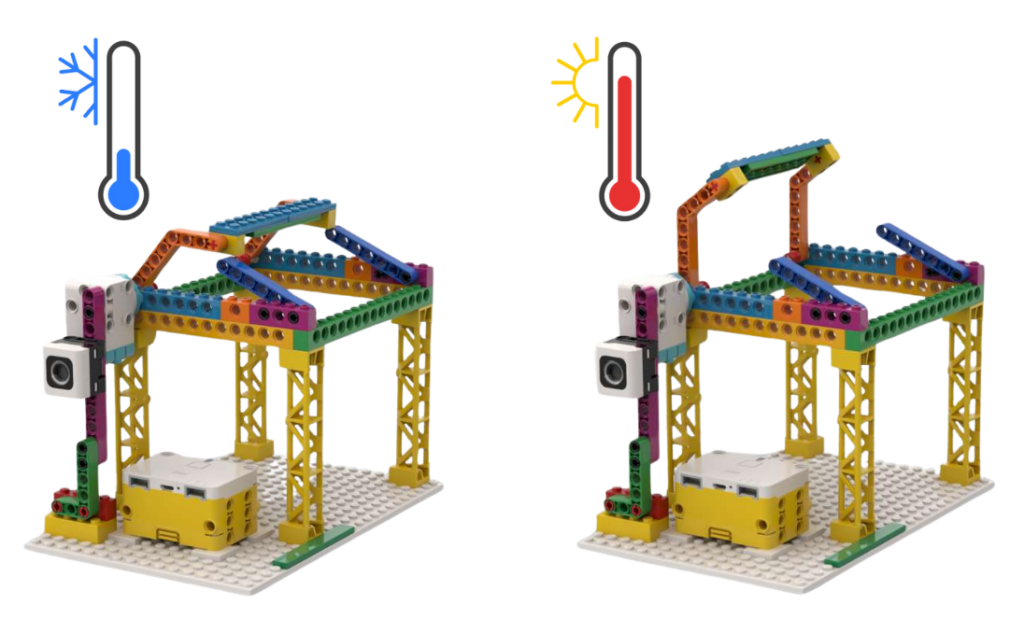
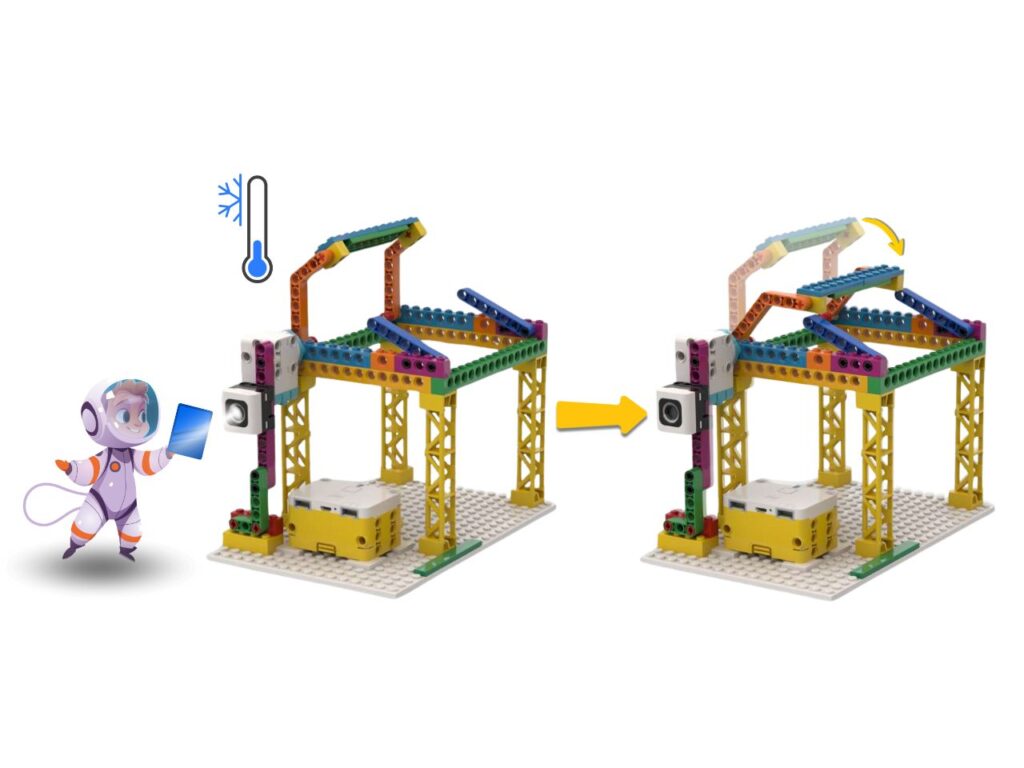
El repte consisteix a fer que el vostre hivernacle es pugui ventilar quan la temperatura a l’interior sigui massa elevada o, si està obert, que es pugui tancar si fa massa fred. Com que no disposeu de sensor de temperatura, podeu utilitzar els blocs de clima per obtenir la temperatura. En aquest exemple, però, simularem els canvis de temperatura amb targetes de colors, ja que els canvis de temperatura poden ser lents i costaria veure l’hivernacle en funcionament.
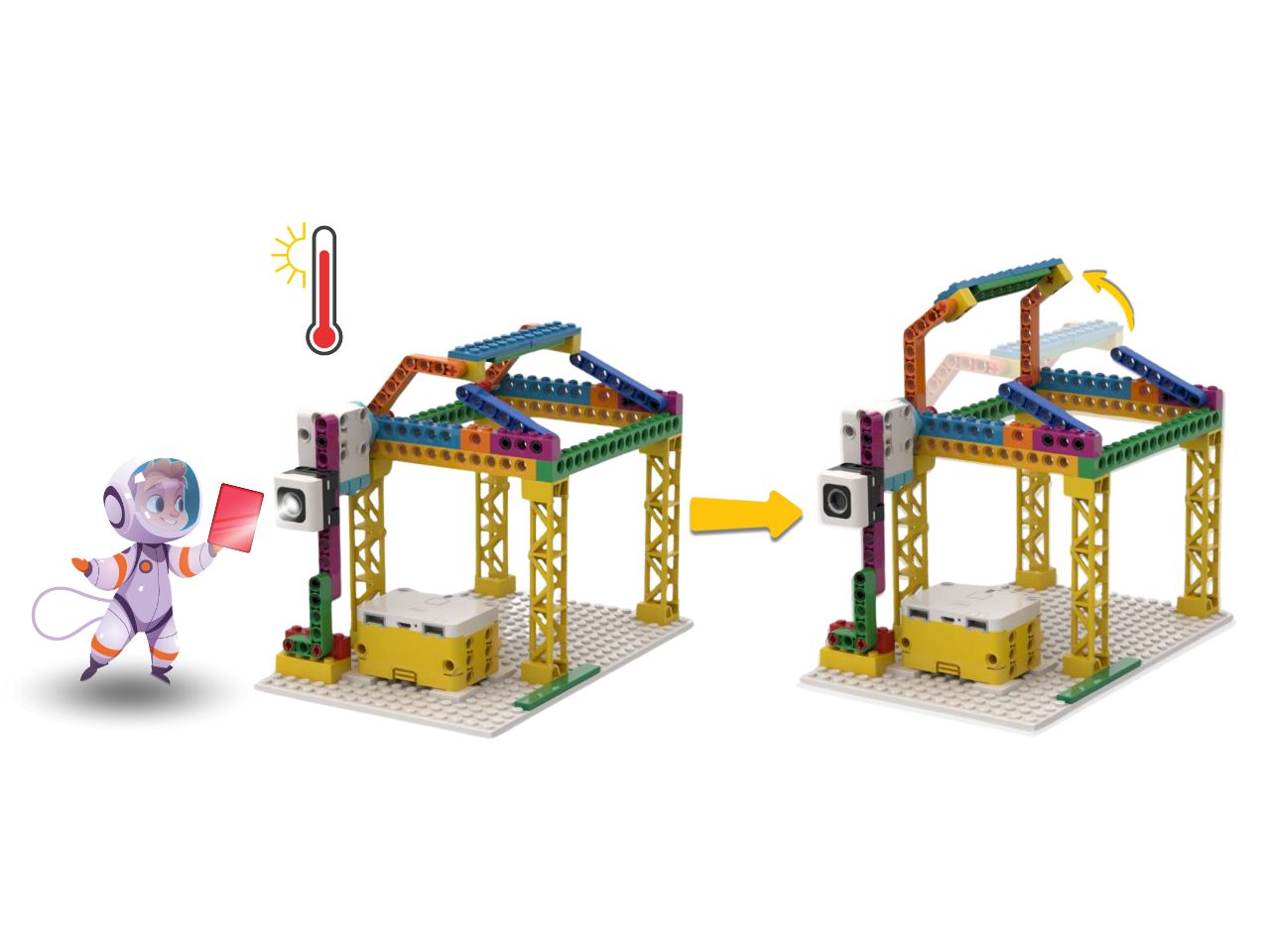
Amb l’ajuda del sensor de color i de les targetes, simularem l’augment i la baixada de temperatura a l’interior de l’hivernacle.
🟦 Ambient fred: si l’hivernacle està obert i la temperatura és baixa (targeta de color blau), s’haurà de tancar el sostre per evitar que la temperatura a l’interior sigui massa baixa.
🟥 Ambient càlid: si l’hivernacle està tancat i la temperatura és alta (targeta de color vermell), s’haurà d’obrir el sostre per evitar que la temperatura a l’interior sigui massa elevada.
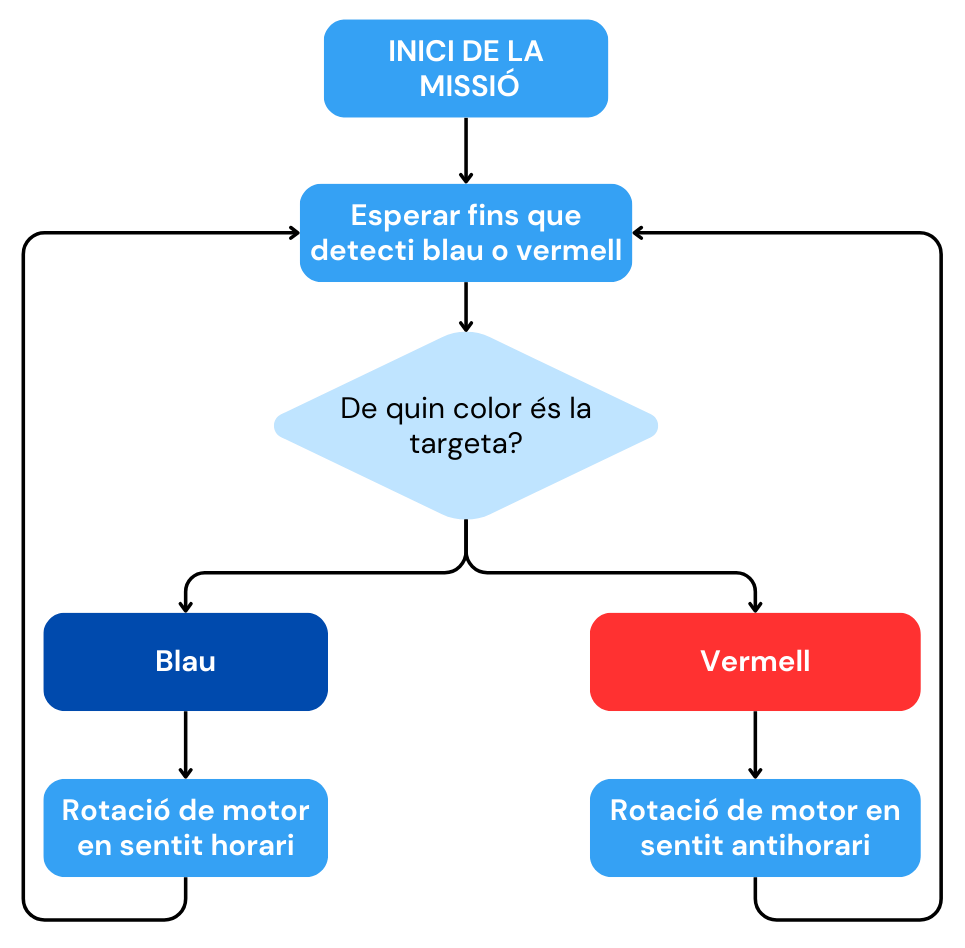
☝️ Utilitzeu els blocs de motor que permeten treballar amb el nombre de rotacions i ajusteu el sentit de gir i el valor de la rotació.

☝️ Feu que no s’activi el motor fins que no detecti color vermell o blau.

🔸 Diagrama de flux
🔸 Blocs recomanats
A continuació, us donem algunes idees sobre els blocs de Spike LEGO Education que podeu d’utilitzar:
👉🏾 Esdeveniments (per començar):
👉🏾 Control (per sempre):

👉🏾 Control (Esperar fins que):
👉🏾 Control (Si… aleshores):
👉🏾 Sensor de color:

👉🏾 Operadors (“o”):

Investigueu!
Per començar, mireu de respondre aquestes preguntes sobre el robot:
🔎 Pot mesurar valors ambientals (temperatura, humitat, llum…)?
🔎 Com pot obtenir altres dades ambientals?

Què necessiteu?
✅ Conjunt LEGO SPIKE Prime (hub, peces de construcció, sensor de color, sensor de força i un motor).
✅ Material per fer les fruites xeldonianes (pintura, plastilina, globus…).
🔸 Preparació de la missió
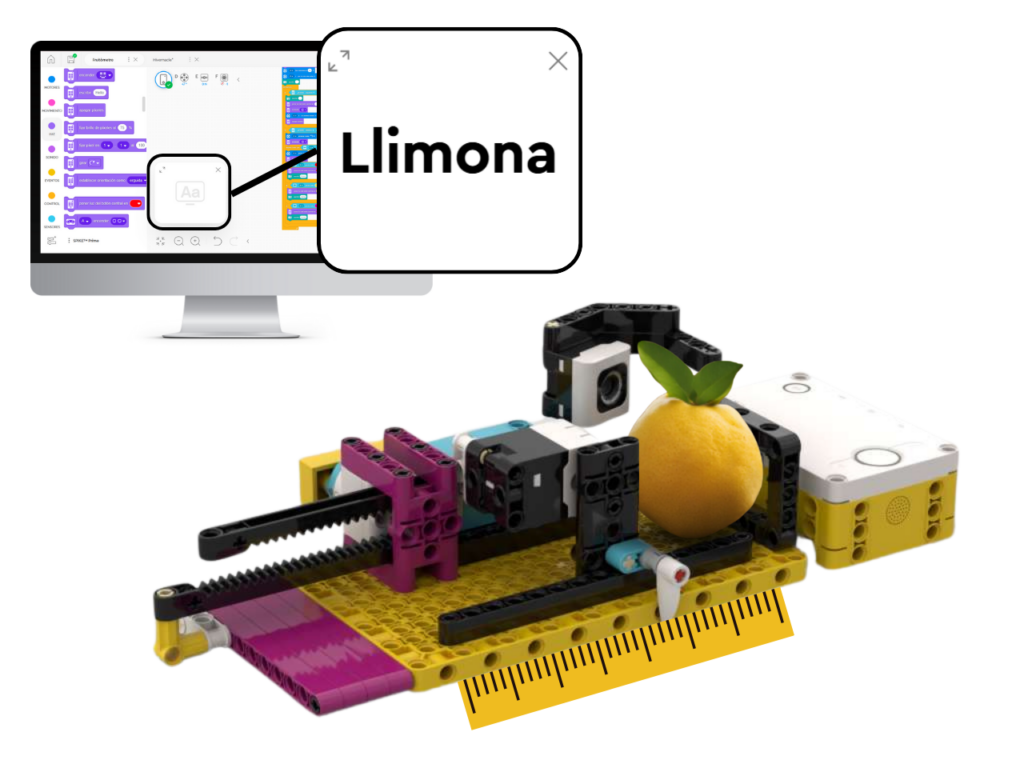
Haureu comprovat que el LEGO Spike Prime no té sensor de temperatura. Tot i així, a l’entorn de programació de LEGO SPIKE podeu trobar blocs per treballar amb dades de la previsió meteorològica de la vostra ubicació. En aquest repte, us demanem que construïu un dispositiu, que hem anomenat fruitòmetre, que sigui capaç de mesurar la mida d’una fruita xeldoniana i determinar quina fruita és a partir del seu color.
Us oferim dos recursos: una explicació per treballar amb els blocs de clima directament en pantalla i un exemple de construcció del fruitòmetre.
Per carregar el blocs de clima, busqueu aquesta icona a baix a l’esquerra a l’entorn de programació de LEGO Education SPIKE:
Quan feu això, s’obre una finestra amb diverses extensions que podeu carregar. Carregueu l’extensió que es diu “Gestor de clima”:
Quan hàgiu carregat aquesta extensió, tindreu una nova categoria de blocs, anomenada “clima”:
Podeu utilitzar aquests blocs per condicionar la programació del vostre hivernacle, però també teniu l’opció de veure aquestes dades directament a l’ordinador. Per fer-ho, carregueu l’extensió “Pantalla”:
Quan carregueu l’extensió “Pantalla”, us apareixerà la categoria de blocs “Pantalla” i veureu aquesta icona a la part inferior esquerra de l’àrea de treball:
Si feu clic sobre la icona, s’obrirà una petita pantalla:
Podeu treballar amb les dades del gestor de clima i mostrar-les en aquesta pantalla. A continuació, farem un petit exemple: mostrarem la temperatura actual d’una ubicació i la velocitat del vent i farem que es vagin alternant cada 3 segons:
1. De la categoria “Clima”, situeu el bloc “fijar ubicación como” a sota de “cuando se inicia el programa” i poseu el nom de la vostra població:
2. A continuació, del bloc “Control” trieu el bloc “por siempre”. A dins d’aquest bloc, de la categoria “Pantalla”, escolliu el bloc “Escribir Hola” i del bloc “Operadors”, col·loqueu el bloc “unir…” on diu “Hola”. Per tal que es mostrin les unitats, poseu un altre bloc “unir” a dins del primer bloc “unir”:
Per acabar, poseu un bloc d’espera de 3 segons:
4. A continuació, feu el mateix procediment per mostrar la velocitat del vent.
5. Executeu el programa i veureu com s’alternen les dades a la pantalla:
💡 Proposta per treballar amb els blocs de clima
Us oferim una proposta per poder treballar a l’aula amb els blocs de clima.
Primera part: Recolliu en una taula, com la que podeu descarregar a sota, les mesures de temperatura, vent, precipitació i pressió atmosfèrica durant tots els dies d’una setmana. Feu-ho, aproximadament, a la mateixa hora.
Segona part: Les plantes xeldonianes tenen una particularitat: les seves llavors són molt sensibles a la temperatura i només arrelaran i faran fruits si hem plantat la llavor amb les condicions correctes de temperatura.
El Max i la Lluna han portat llavors d’algunes plantes xeldonianes i us les han fet arribar. Seguint la taula de condicions que poden suportar les llavors xeldonianes, i tenint en compte la temperatura d’aquests dies a la vostra localitat, quines plantes de Xeldon plantarieu a la vostra població perquè creixin sense problemes?
Si no hi ha cap d’aquestes fruites que us pugui servir per plantar-la a la vostra població, inventeu-ne una de nova que compleixi les condicions.
Tercera part: Per acabar, utilitzeu aquesta plantilla de full de càlcul, per dibuixar les gràfiques de les dades ambientals que heu enregistat durant la setmana.
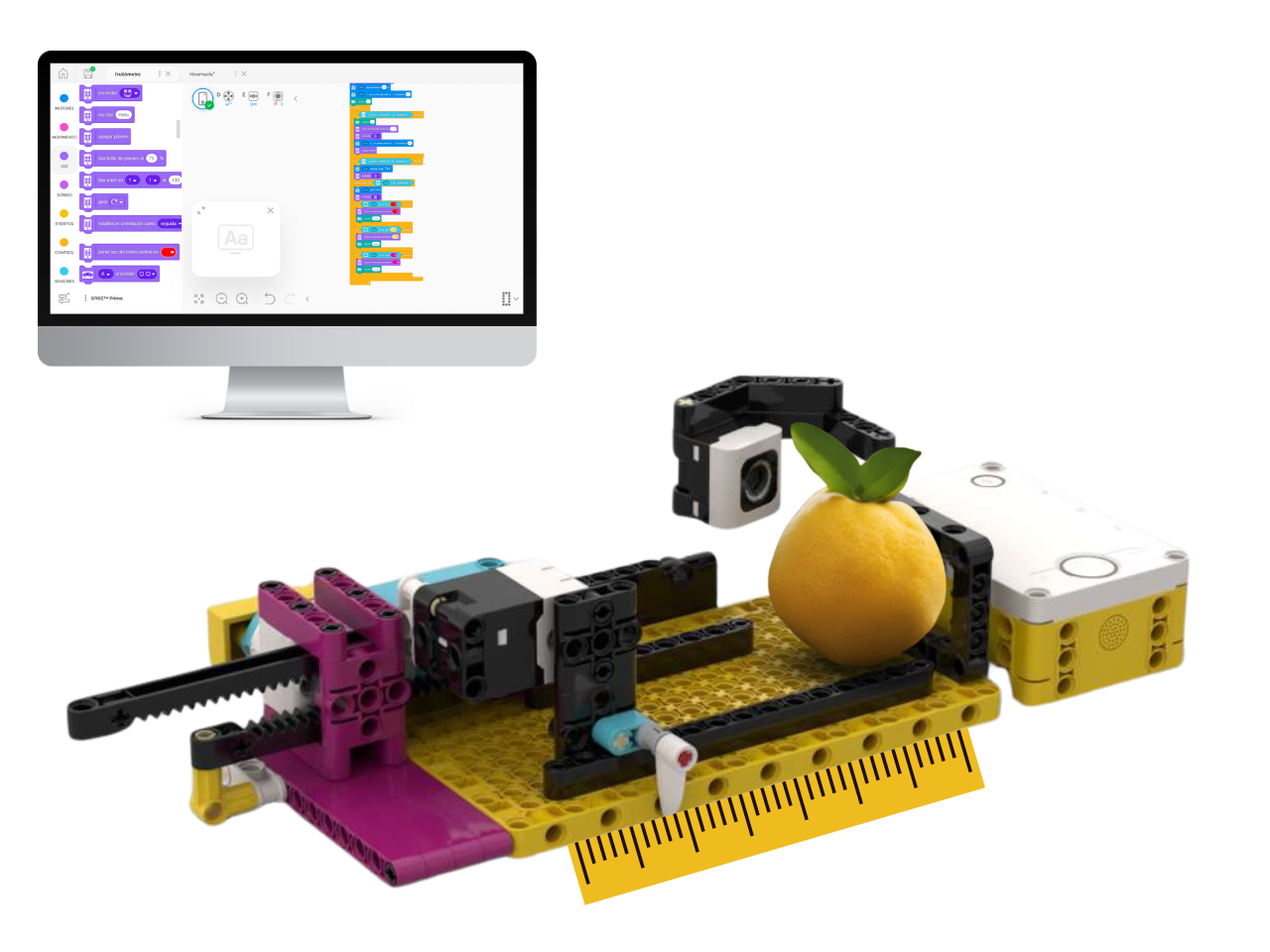
El fruitòmetre és un dispositiu que heu de dissenyar per ajudar els xeldonians a mesurar una peça de fruita i que també permeti identificar-la a partir del seu color.
A Xeldon, igual que passa a la Terra, de vegades es cullen fruites que són massa petites per vendre-les tal com són. Però, en comptes de llençar-les, es poden aprofitar per fer altres coses, com suc o melmelada.
El problema és que les fruites solen ser esfèriques i no sempre és fàcil mesurar-les. Per això, en aquest repte, creareu un dispositiu que ajudi els xeldonians a fer-ho d’una manera més senzilla. A més, aquest aparell haurà de reconèixer el color de la fruita i ens informarà de quina fruita es tracta a través de la pantalla de l’ordinador.
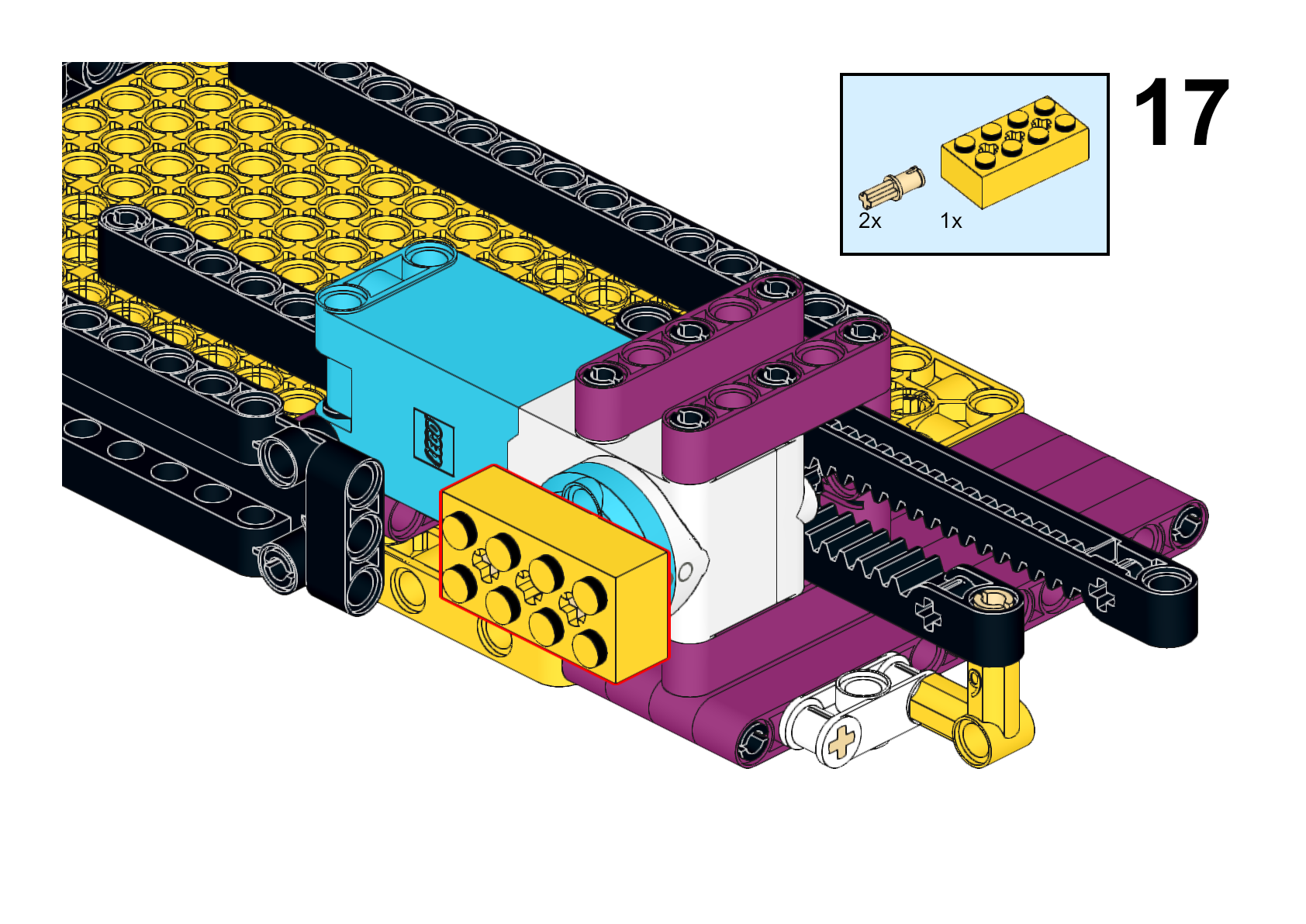
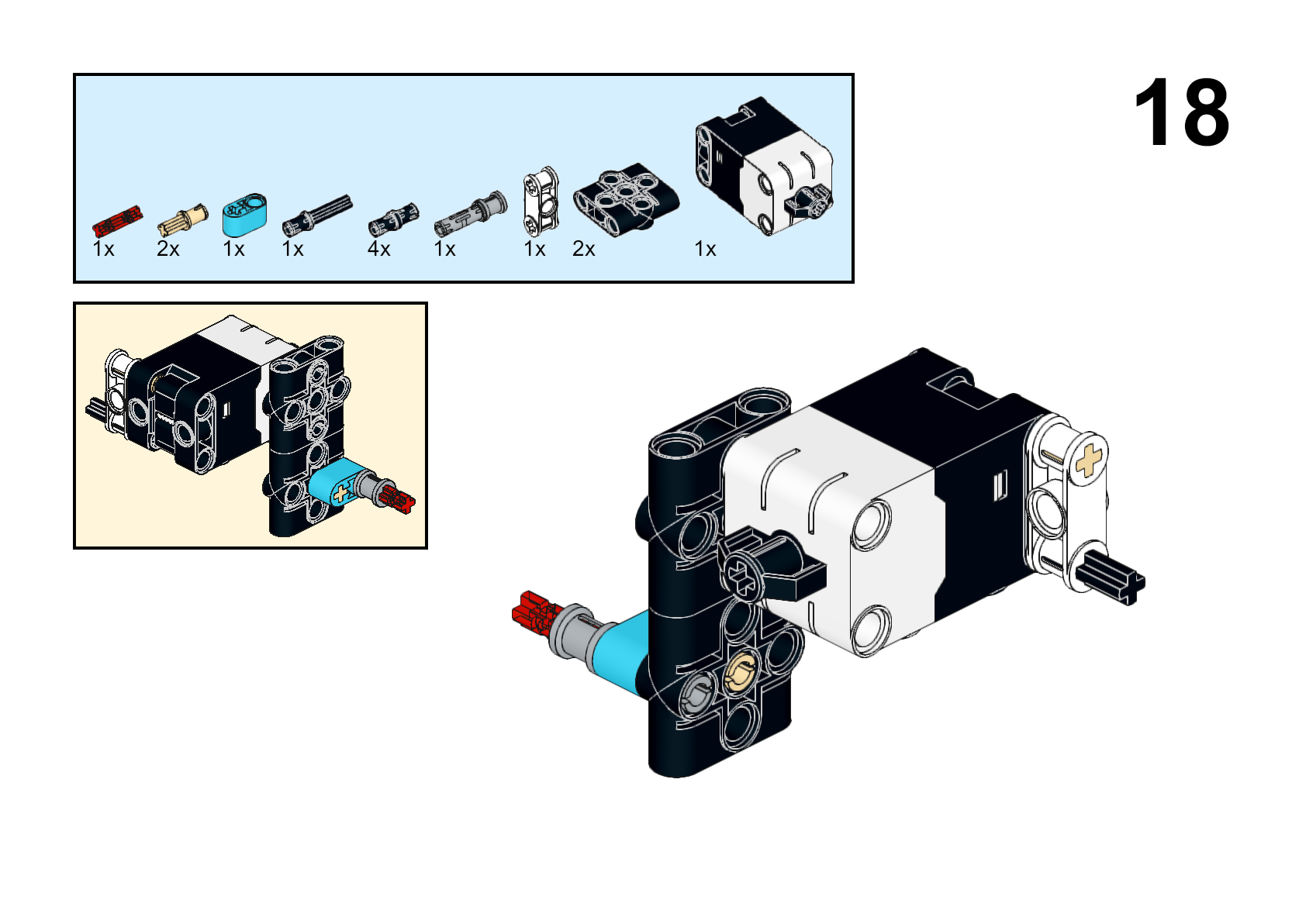
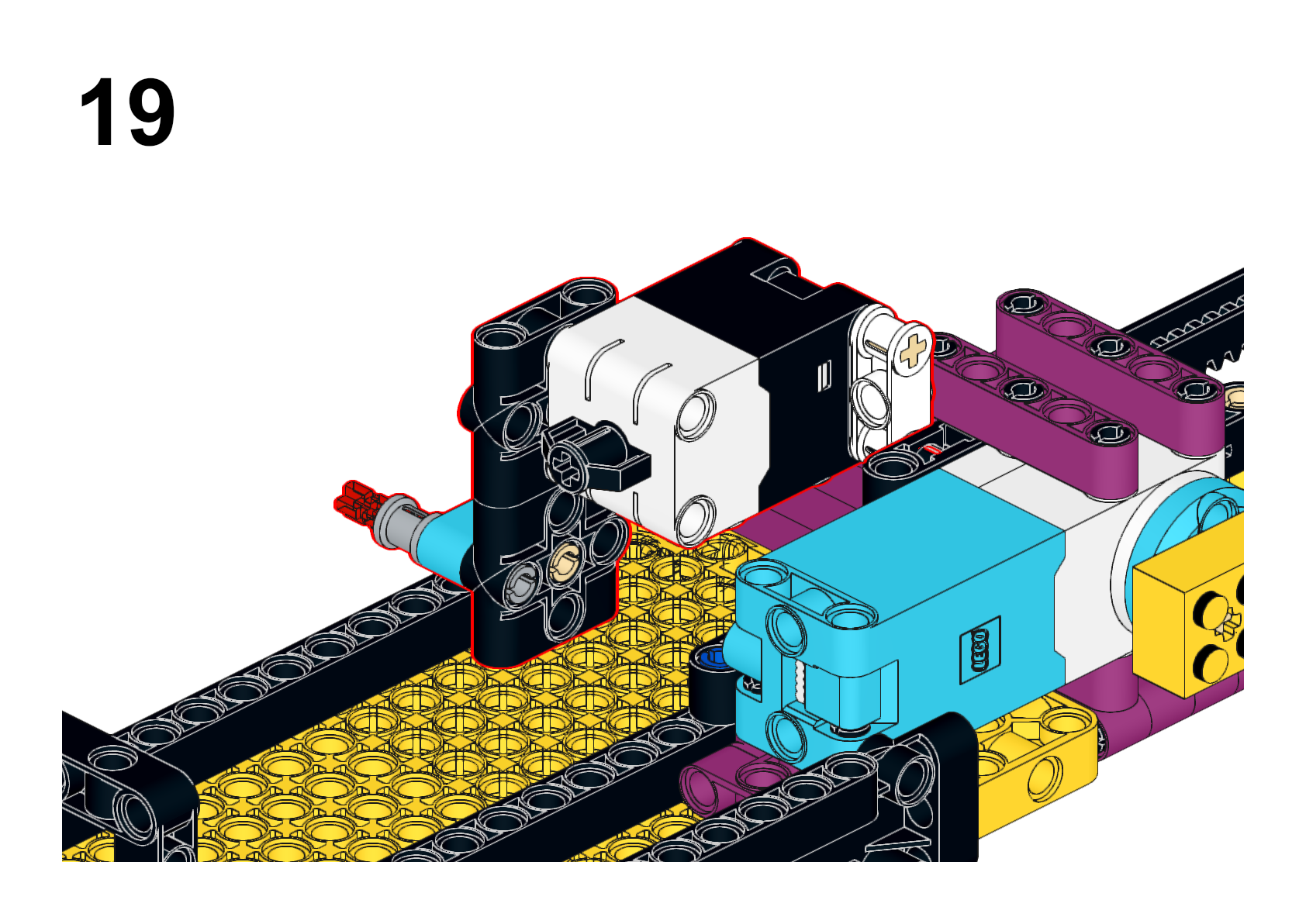
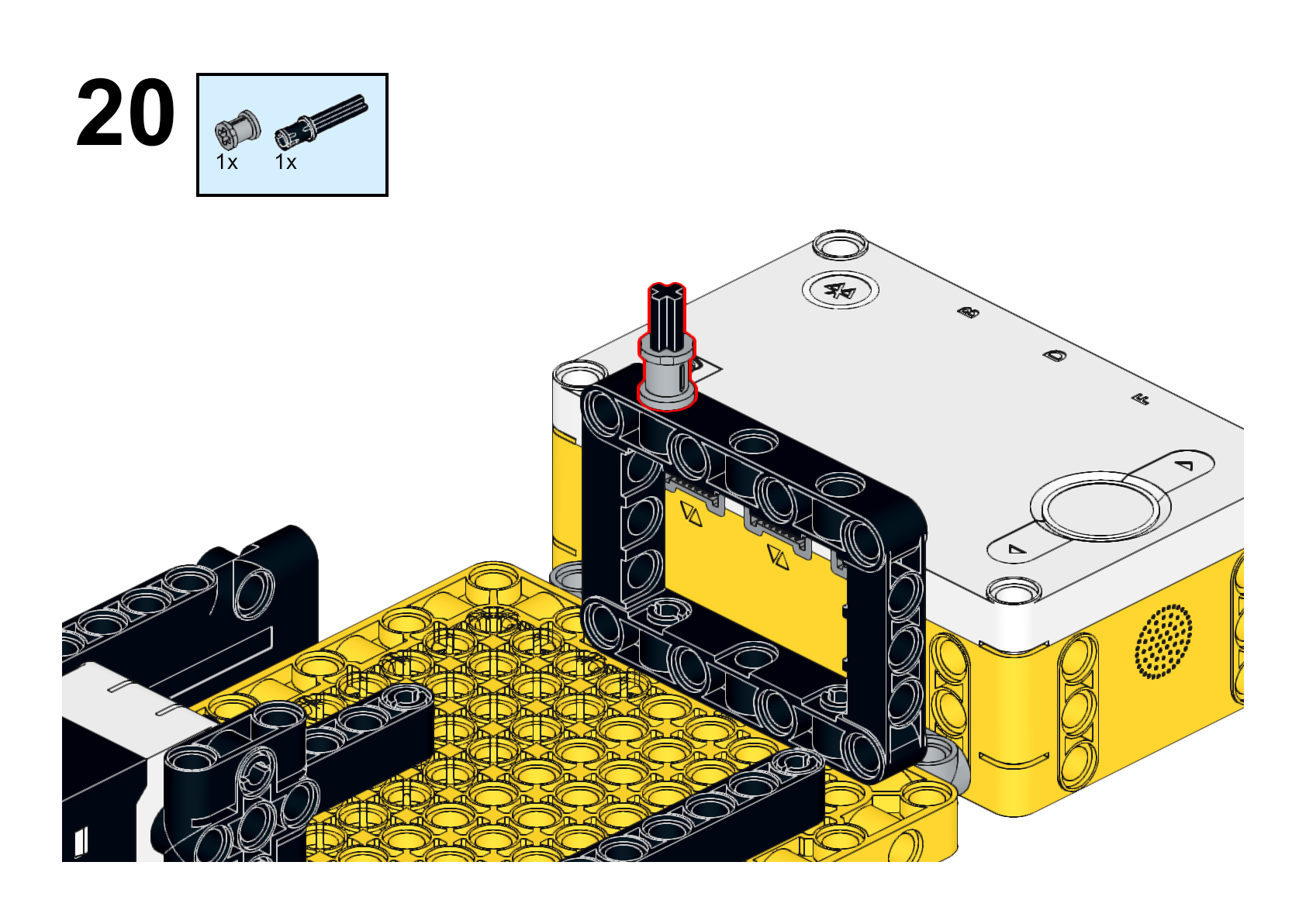
🔸 Construcció del fruitòmetre
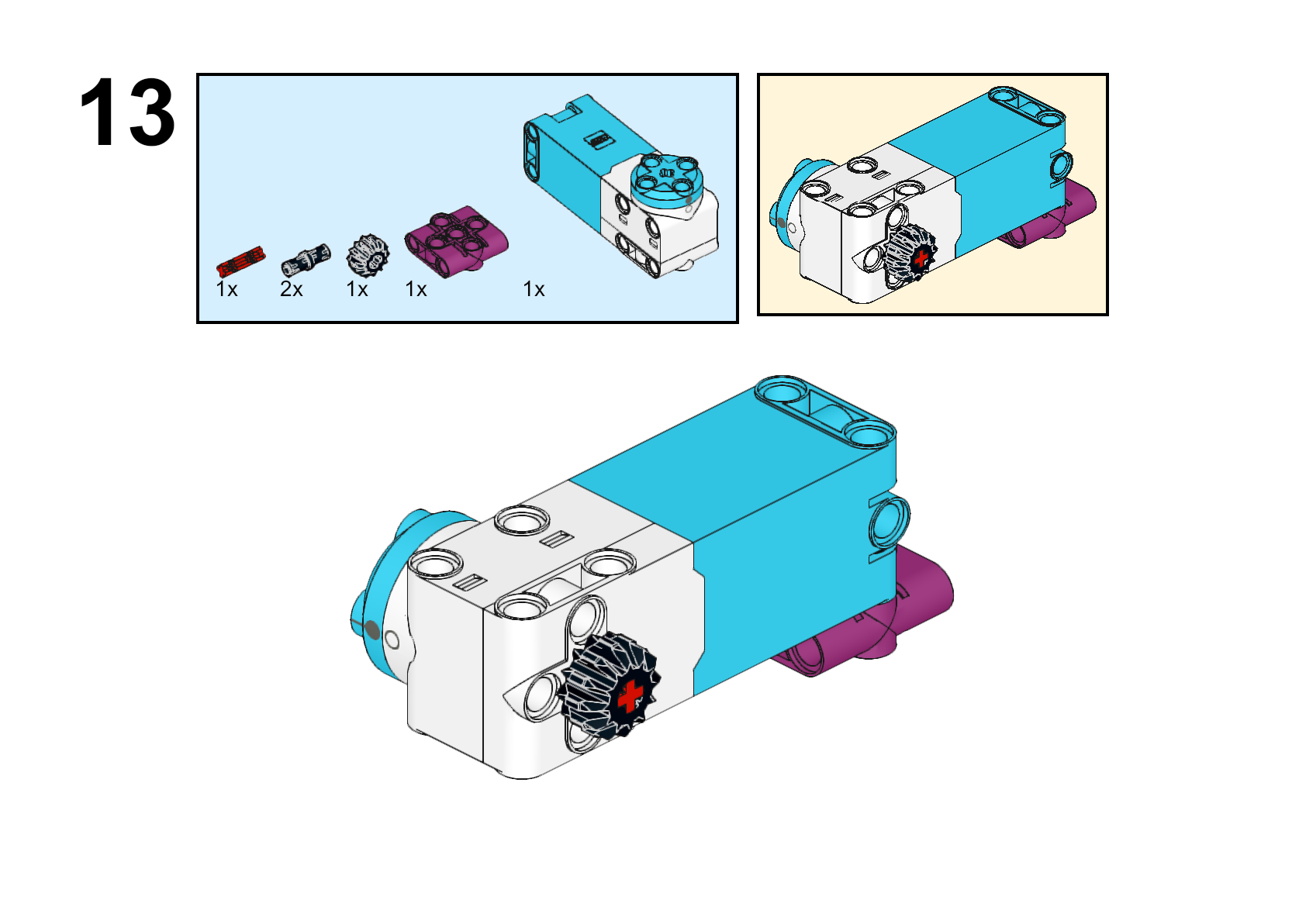
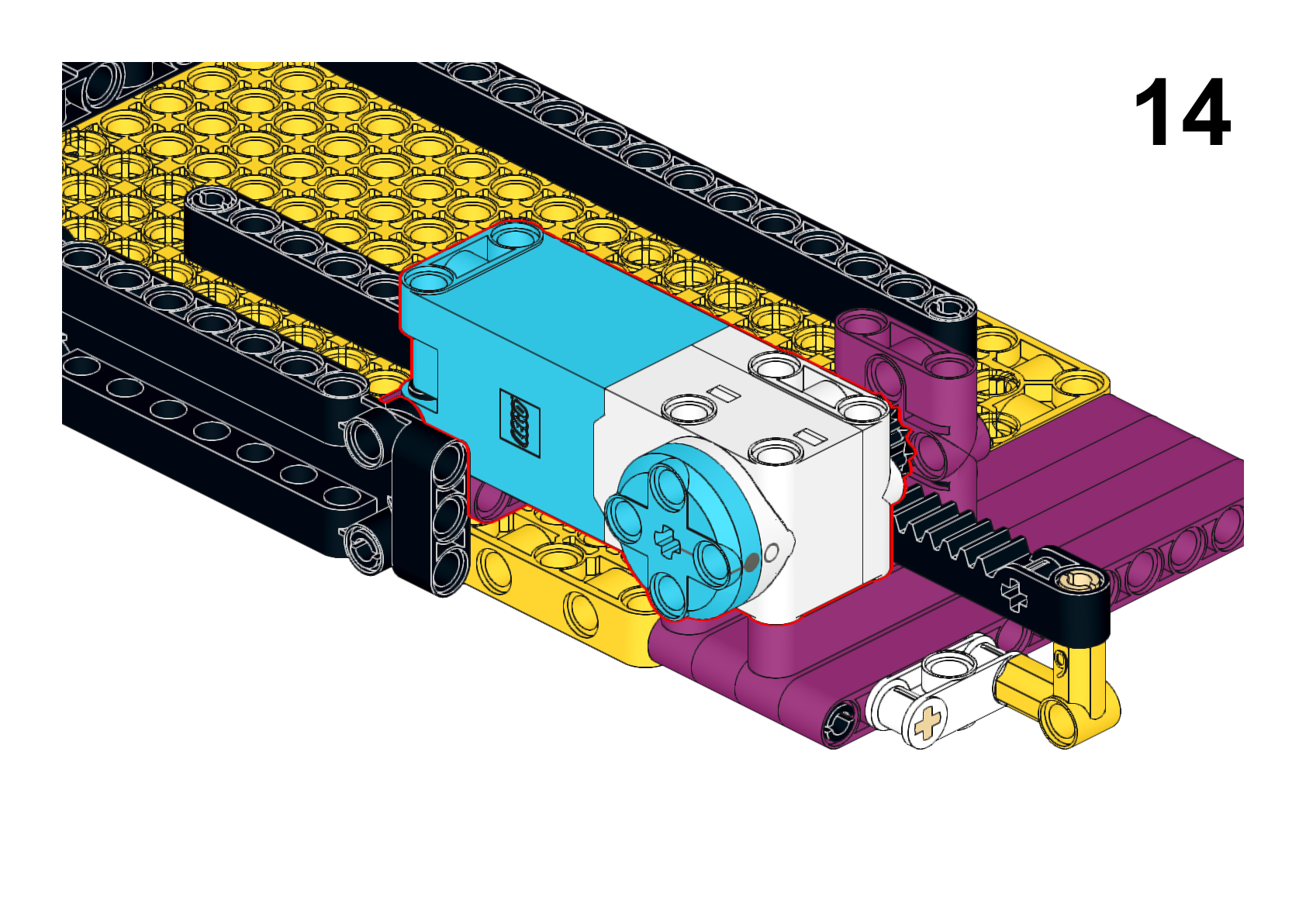
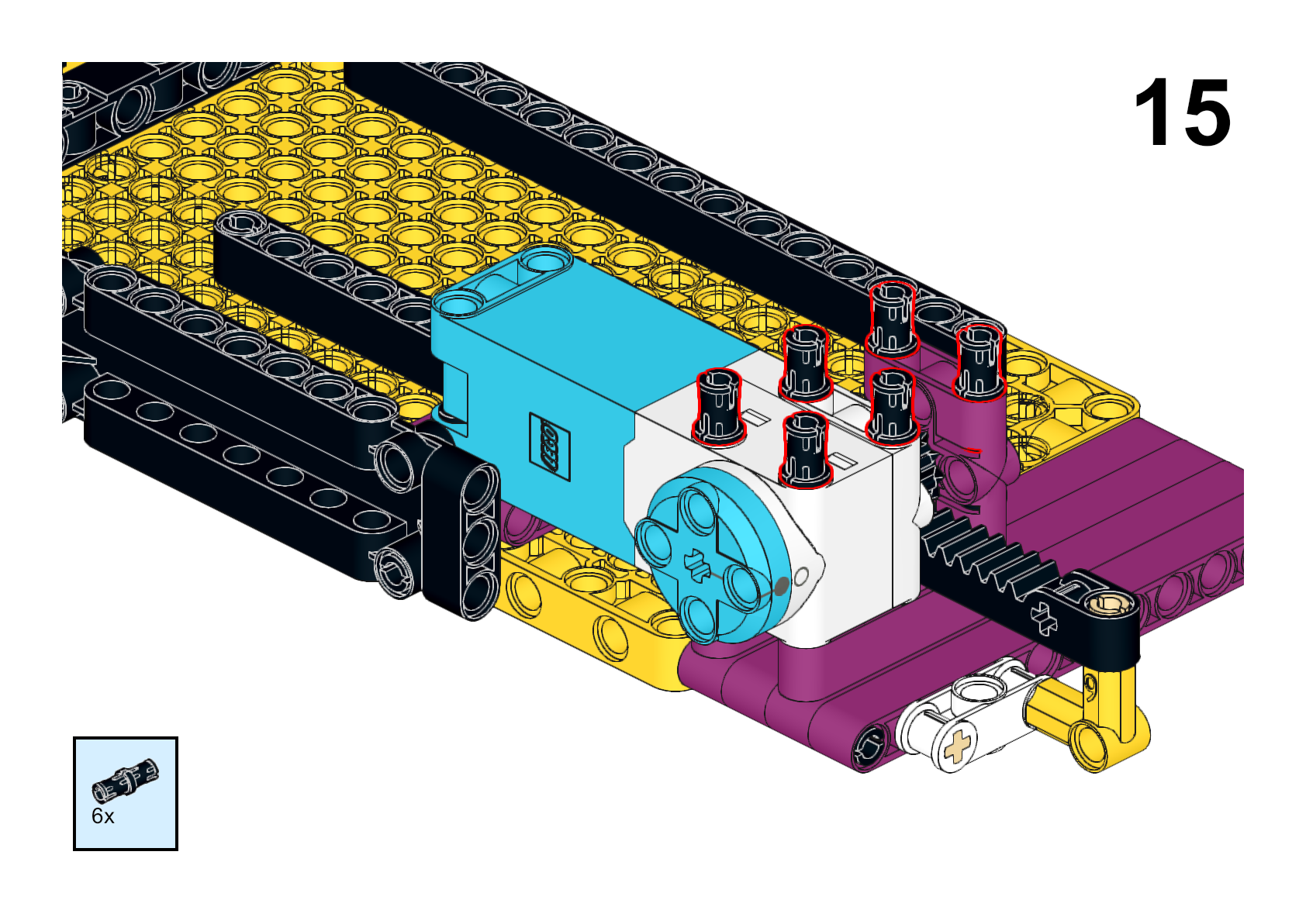
Pas a pas per fer un fruitòmetre
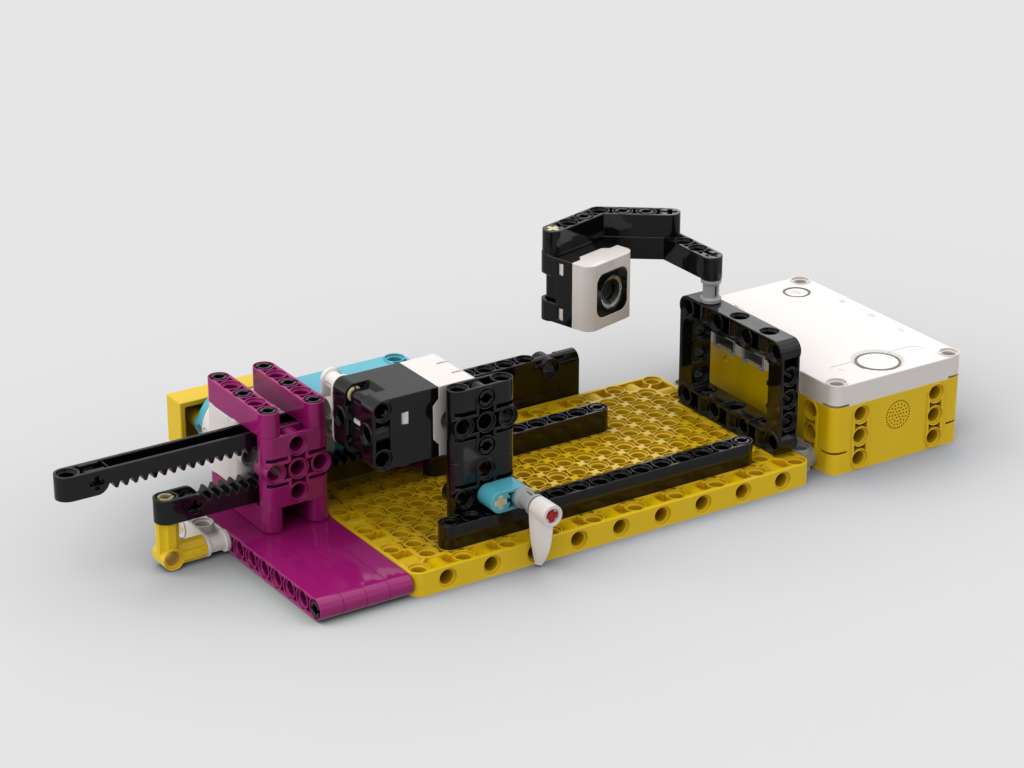
Com sempre, el disseny del vostre dispositiu és lliure, però, com a exemple, us deixem una guia pas a pas per poder muntar un fruitòmetre com el de la imatge:
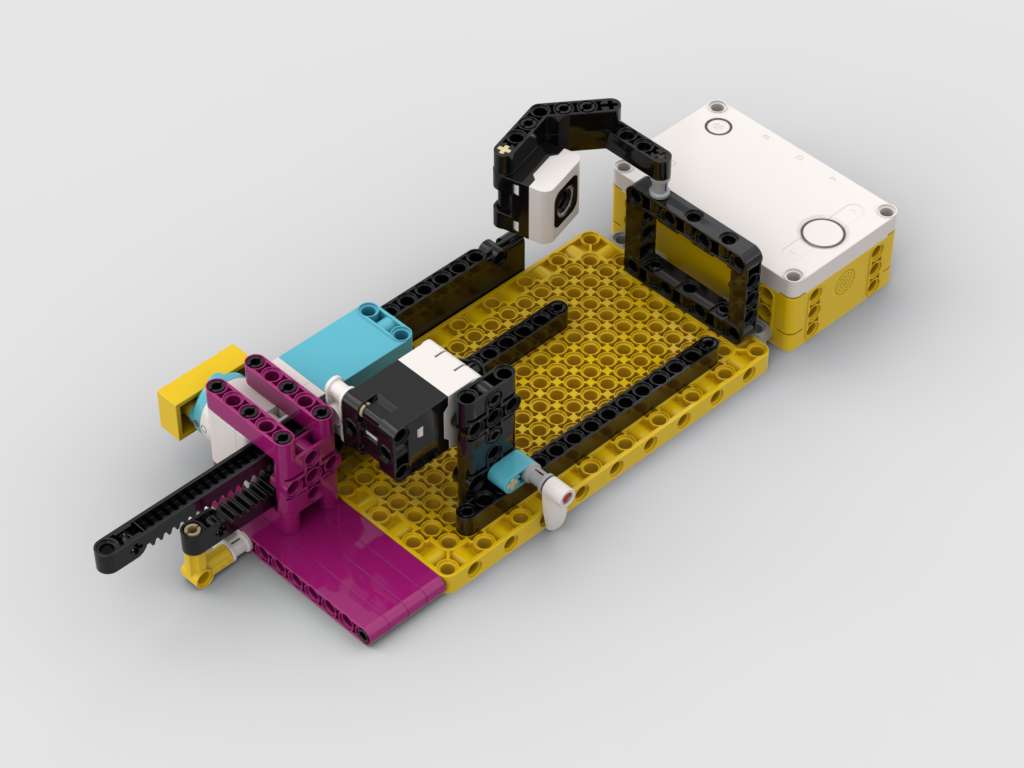
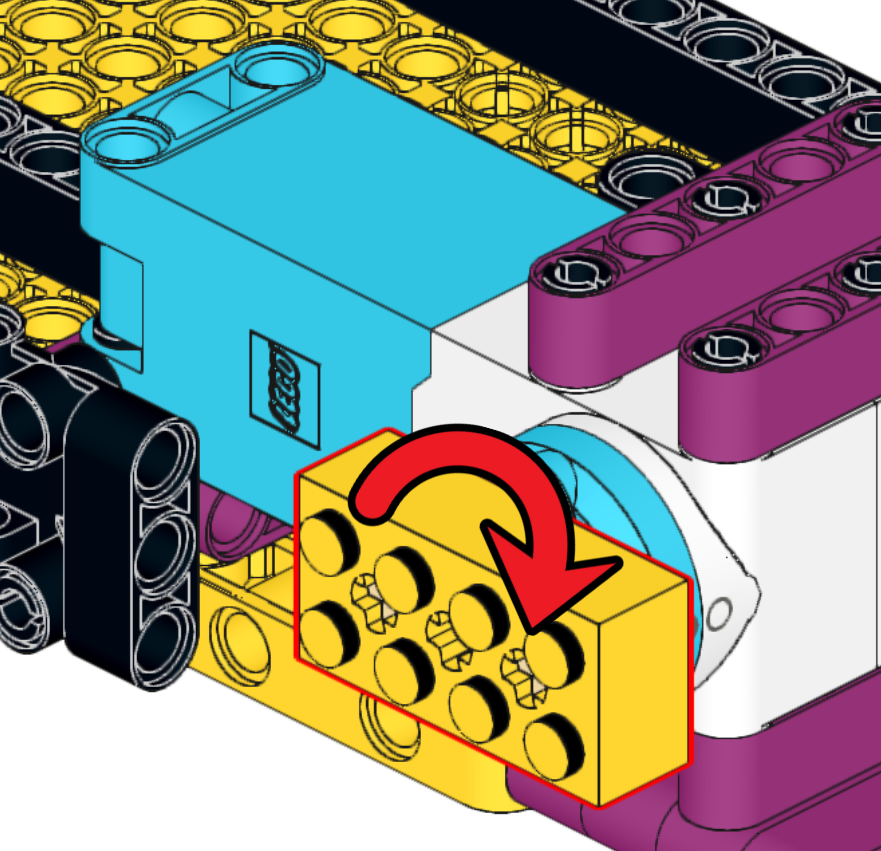
Pas a pas per muntar l’aparell:
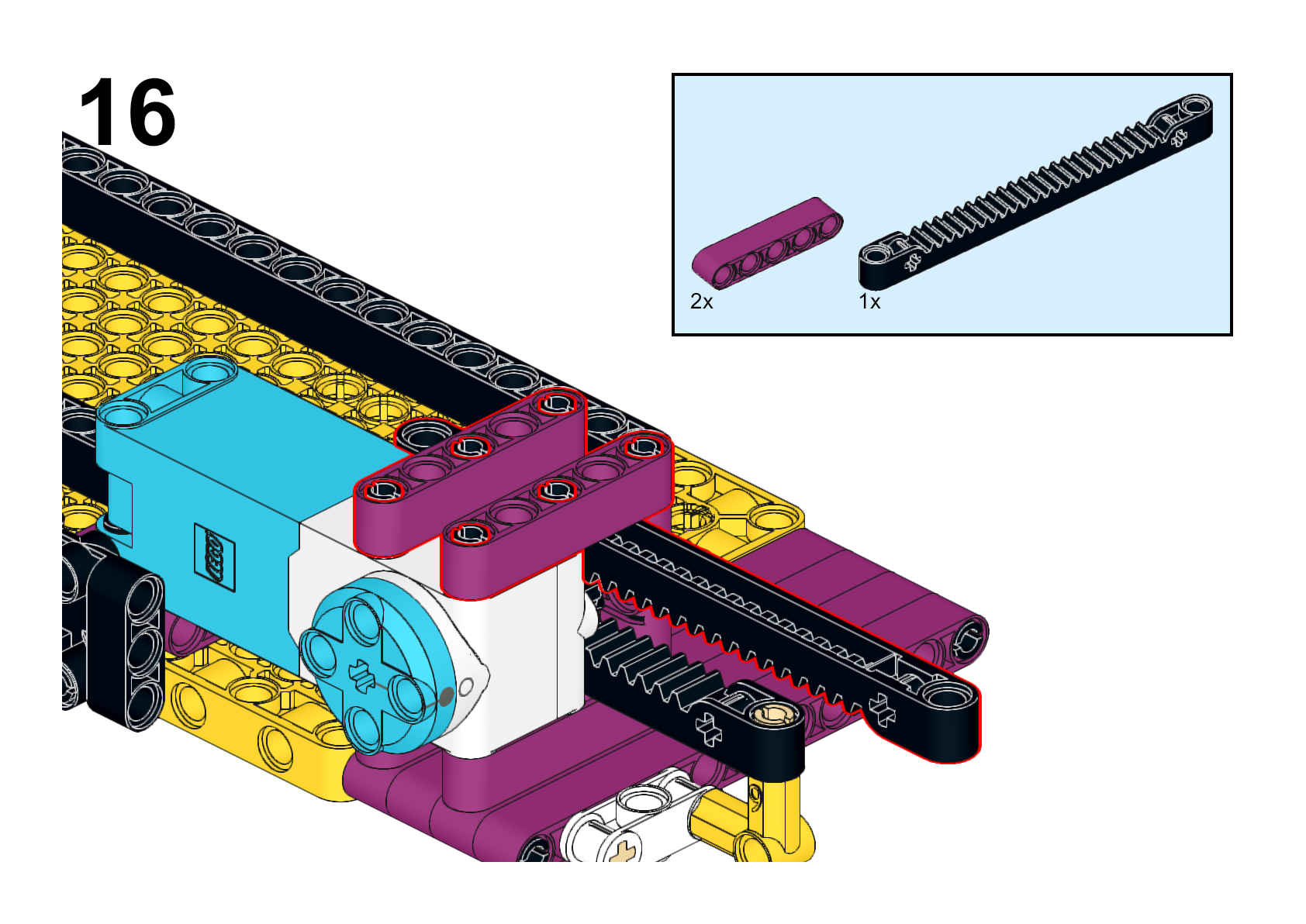
Per acabar, amb cinta adhesiva, enganxeu un regle al lateral on hi ha l’agulla acoblada al lliscador:
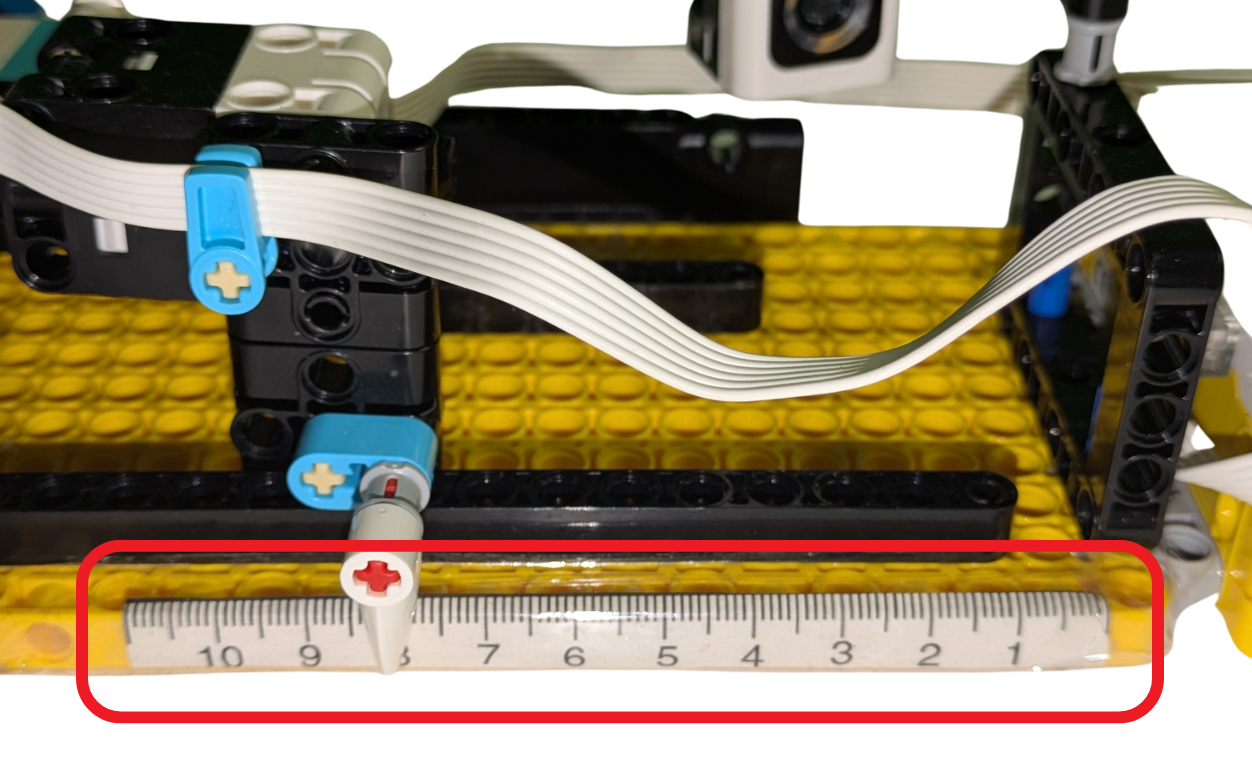
Descarregueu la plantilla amb el regle:
Recordeu que aquest és un repte lliure i podeu fer altres construccions. Sigueu creatius!
🔸 Programació del fruitòmetre
El dispositiu que construïu ha de fer el següent:
Quan s’inicia el programa:
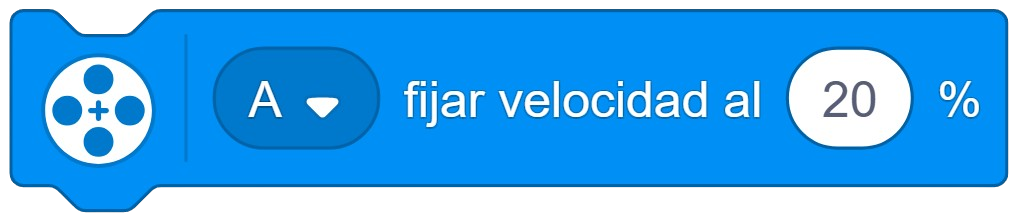
– El sensor de força i el motor han d’estar al punt més allunyat del seu recorregut. Per facilitar el funcionament, fixeu la velocitat del motor a un valor baix (sobre un 20%).
– La pantalla dins de l’entorn de programació LEGO Education SPIKE no ha de mostrar cap missatge.

– La llum central del hub ha de tenir color blanc.
El funcionament del dispositu ha de ser el seguent:
1. Quan es prem el botó dret del hub:
– El motor comença a girar, fent moure el sensor de força cap a la dreta (o cap on hi hagi la fruita, si feu un altre model).

– A la matriu de leds del hub hi apareix una fletxa que marca la direcció del moviment.
– Quan el sensor de força detecta la fruita, el motor s’atura.

– La matriu de leds s’encén completament.
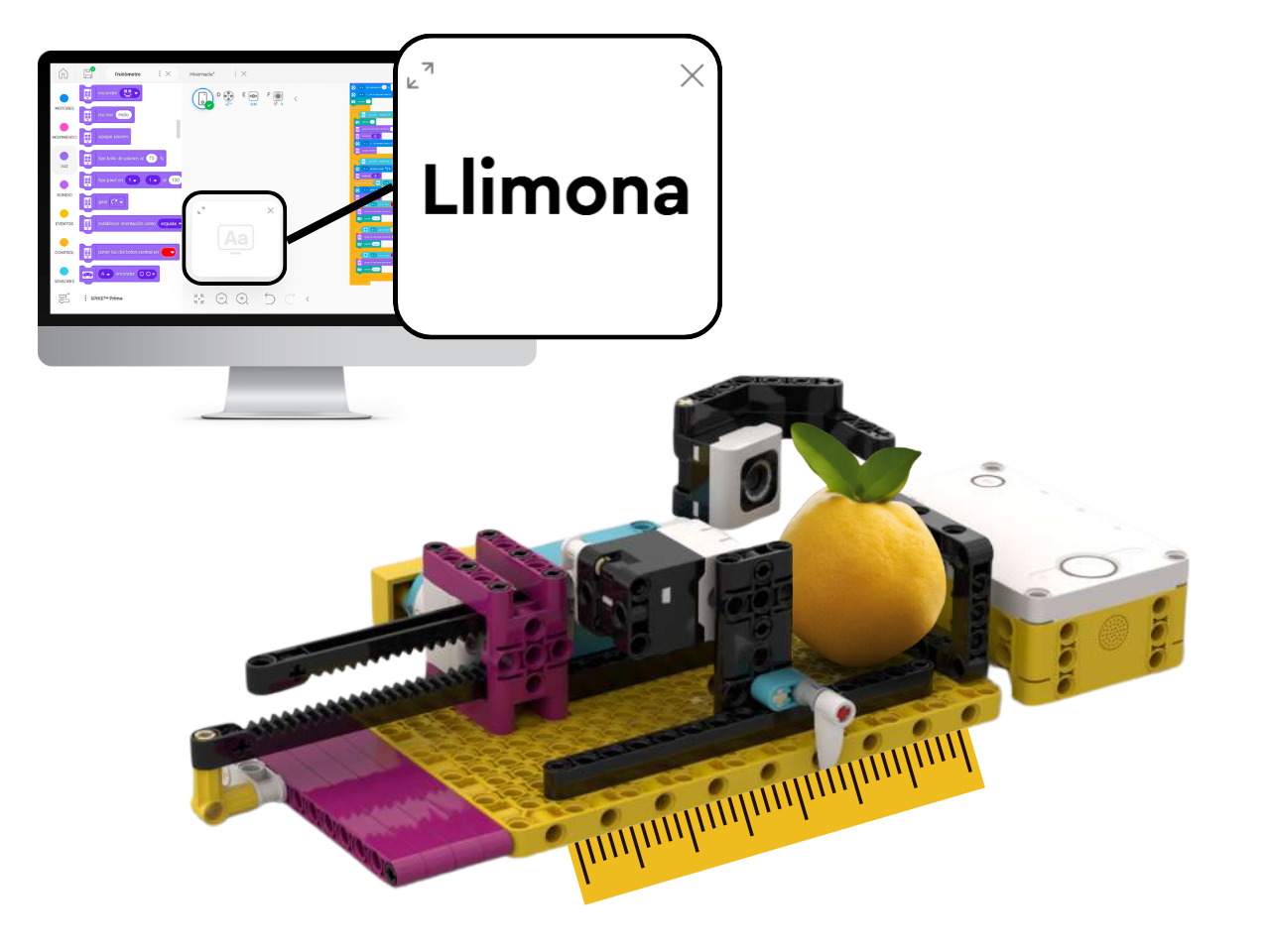
– A la pantalla de l’entorn de programació de LEGO Education Spike hi apareix el nom de la fruita (detectada segons el seu color).
2. Quan es prem el botó esquerre del hub:
– El motor gira, fent moure el sensor de força cap a la seva posició inicial.

– A la matriu de leds del hub hi apareix una fletxa que marca la direcció del moviment.
🤔 Com fem que el sensor de força torni a la seva posició inicial?
💡 Utilitzant la peça rectangular que heu col·locat unida a l’eix del motor, feu girar manualment el motor fins a la posició que voleu que sigui la inicial:
Quan el motor estigui a la posició inicial, fixeu-vos quin és el valor de l’angle del motor:
Poseu aquest valor al bloc de Motors “ir … a la posición …”:

Feu les vostres fruites xeldonianes
Com heu vist, el fruitòmetre identifica les fruites a partir del seu color. Us proposem que dissenyeu i elaboreu quatre fruites xeldonianes diferents, tenint en compte que el sensor de color pot detectar només els següents colors:

Per construir les fruites podeu utilitzar el material que vulgueu: pintura, plastilina, globus… Només és important que els quatre colors i les mides siguin diferents, això us donarà més joc quan proveu el fruitòmetre. També us podeu inventar el nom i les seves característiques (quin gust té, quan s’ha de plantar, quan s’ha de collir, quan s’han de regar, si s’han de posar al sol o a l’ombra, quina mida tenen, quines receptes es poden fer…). Podeu elaborar una fitxa per a cada fruita. Feu volar la vostra imaginació!
🔸 Blocs recomanats
A continuació, us donem algunes idees sobre els blocs de Spike LEGO Education que podeu d’utilitzar:
👉🏾 Esdeveniments (per començar):
👉🏾 Control (per sempre):

👉🏾 Control (Esperar fins que):
👉🏾 Control (Si… aleshores):
👉🏾 Sensor de color:
👉🏾 Sensor dels botons del hub:

👉🏾 Sensor de força:

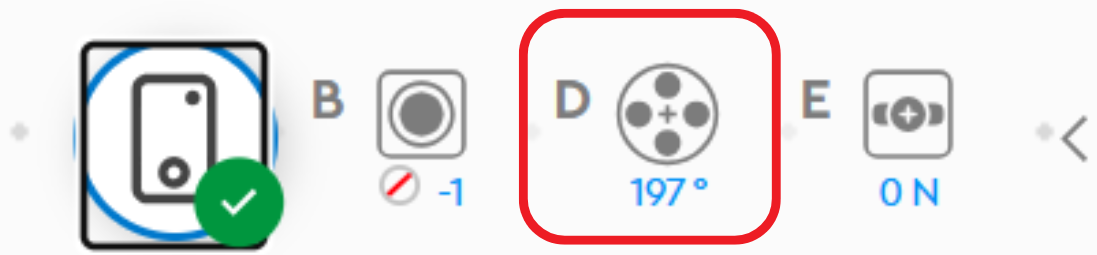
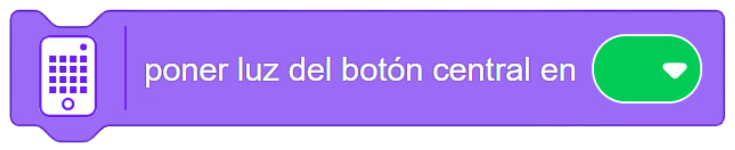
👉🏾 Llums (botó central del hub):
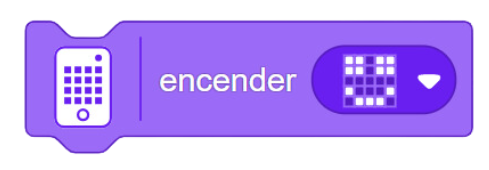
👉🏾 Llums (matriu de leds del hub):
👉🏾 Pantalla (escriure):

👉🏾 Motor (fixar velocitat):

👉🏾 Motor (tornar a la posició):

👉🏾 Motor (arrencar motor):

👉🏾 Motor (parar motor):