

Guia ràpida
Keyestudio UNO: com treballar amb servomotors
En aquesta guia ràpida trobareu les instruccions per treballar amb servomotors com els que trobeu als conjunts de primària i de secundària bàsic.
Material necessari
- Placa Keyestudio UNO
- Servomotor (KS0194)
- Polsador (KS0029)
- Ordinador. Abans de començar a fer servir la placa Keyestudio UNO, cal comprovar que el nostre dispositiu tingui instal·lats els controladors necessaris. Trobareu tota la informació en aquesta fitxa.
1. Executeu el programa AB-Connector. Recordeu que cal que estigui en execució tota l’estona mentre treballeu amb ArduinoBlocks.
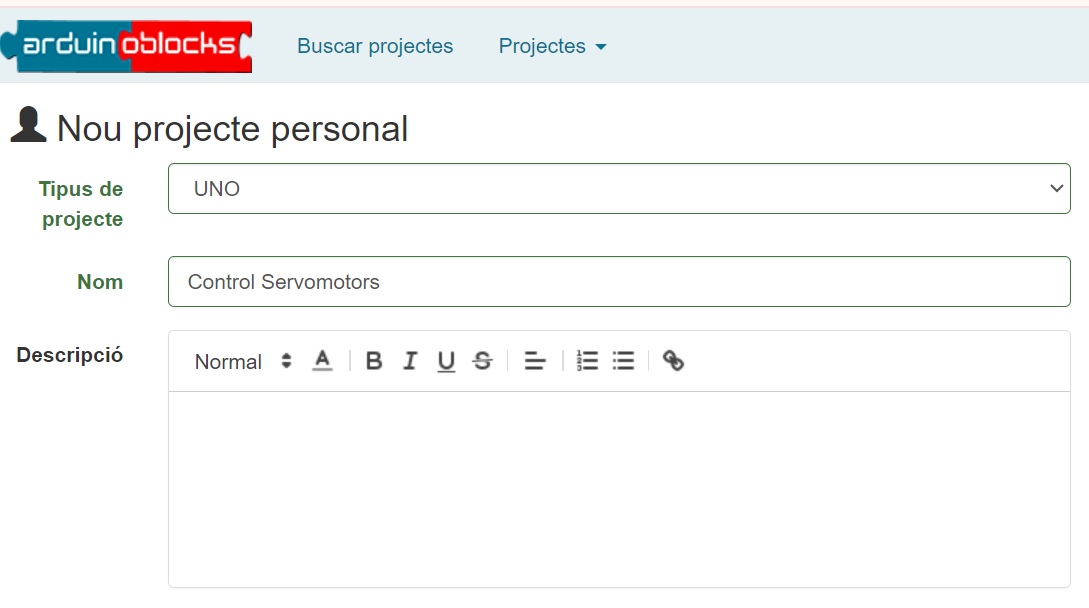
2. Aneu a ArduinoBlocks, inicieu sessió i comenceu un nou projecte del tipus “UNO”
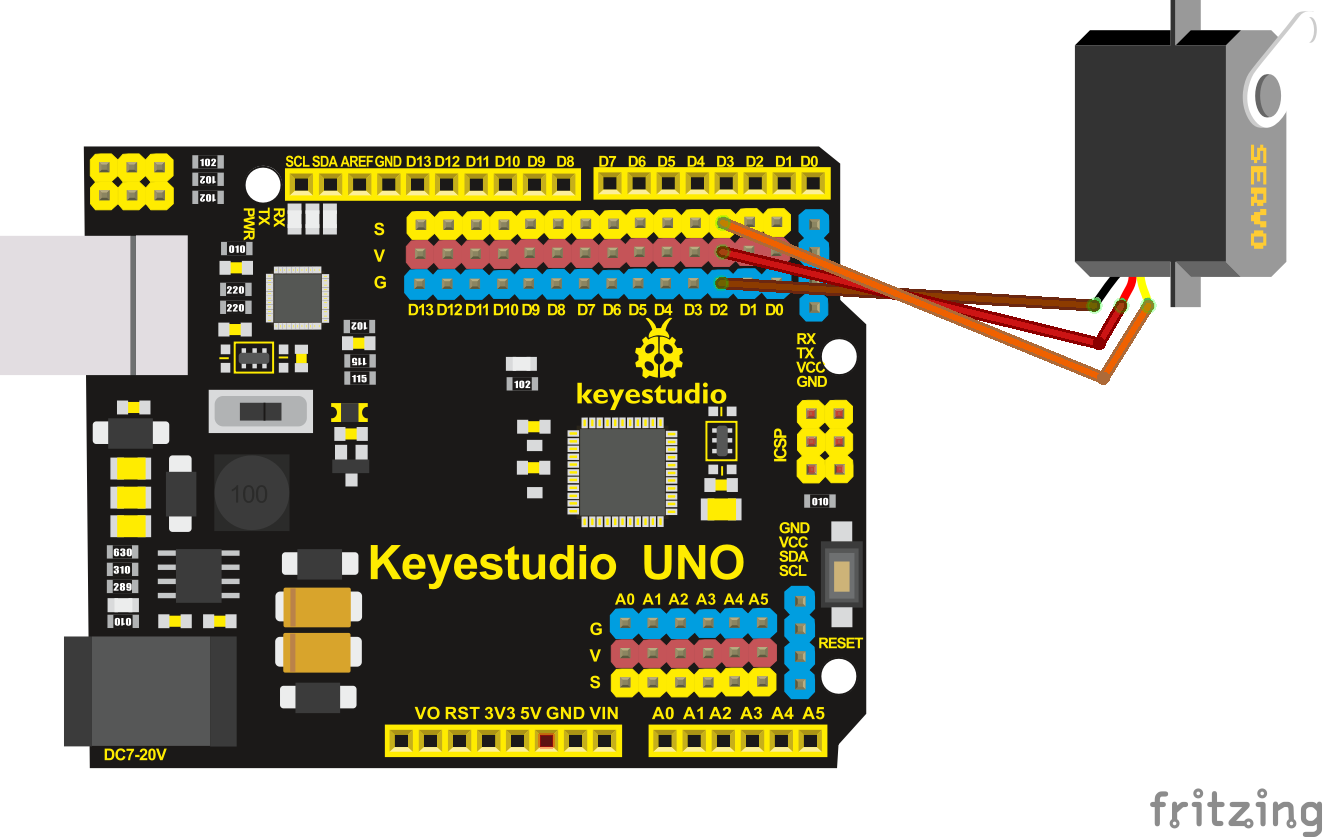
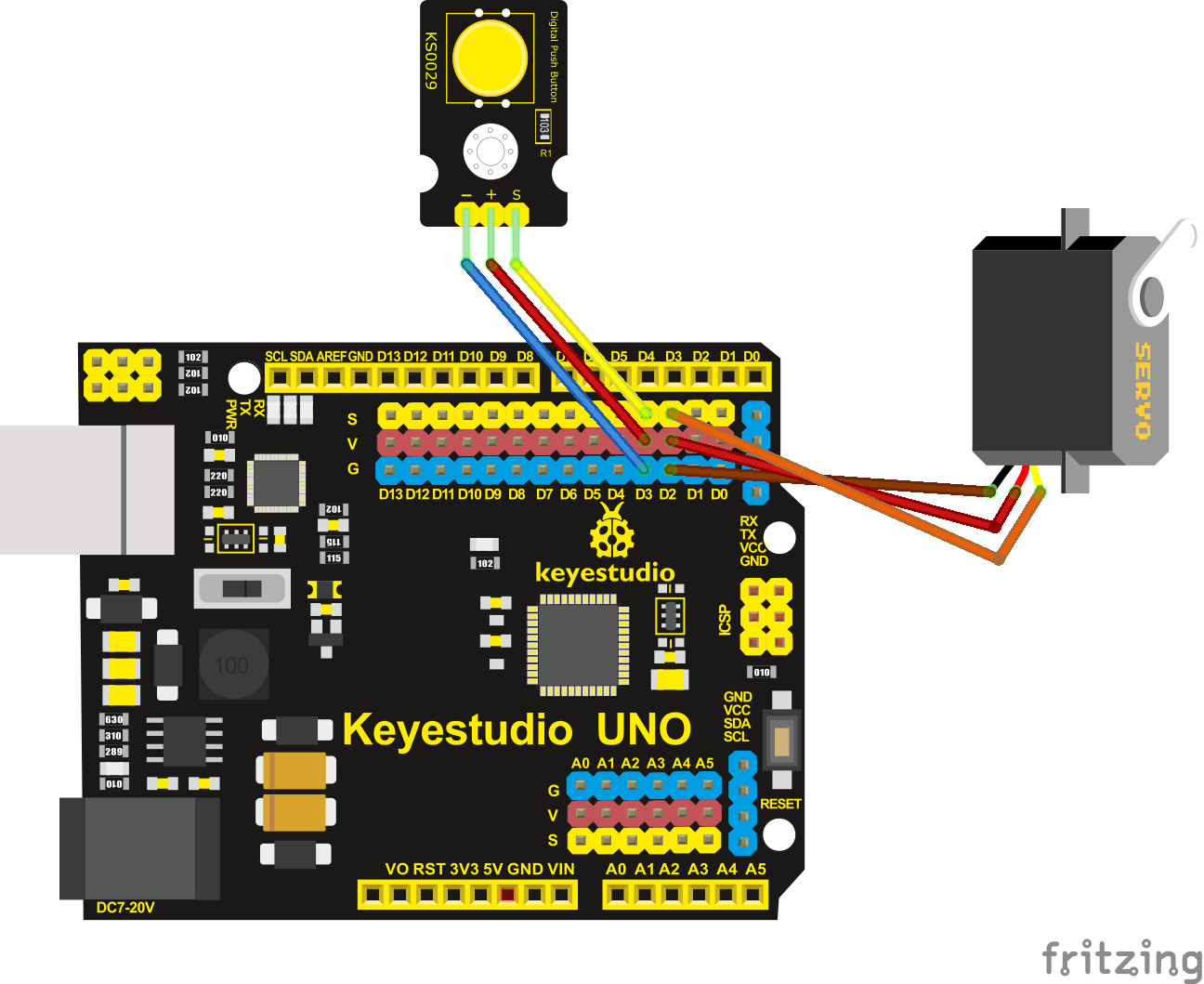
3. Connecteu el servomotor a algun dels pins digital de la placa (a l’exemple utilitzarem el pin D2), tenint en compte que el cable marró del servomotor correspon a la G -terra- (color blau de la placa), el cable vermell del servomotor correspon a la V -voltatge- (color vermell de la placa) i el cable taronja del servomotor correspon a l’S -senyal- (color groc de la placa)
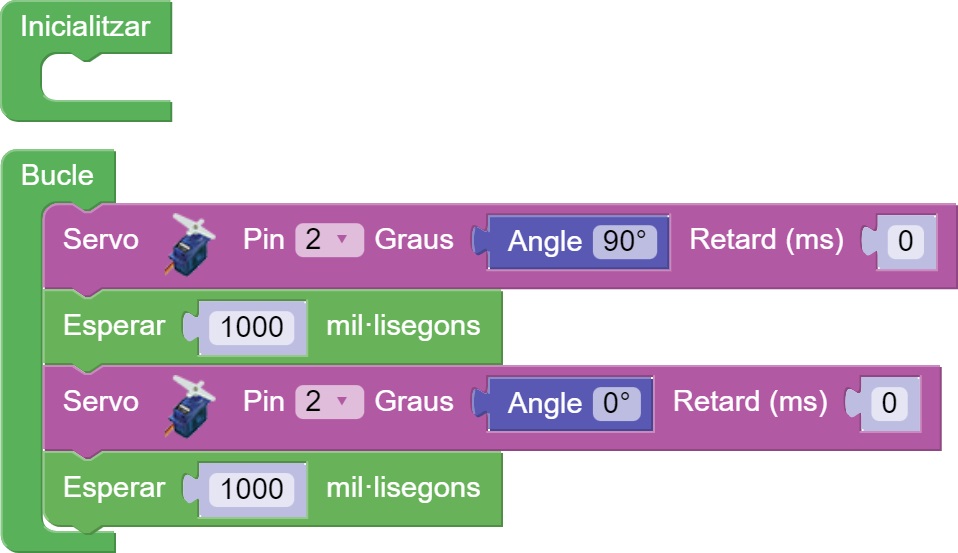
4. A continuació, de la categoria “Motors / Servo” seleccioneu el bloc “Servo” i poseu-lo al bloc “Bucle”. Seleccioneu el pin on teniu connectat el servomotor i indiqueu l’angle de gir i si voleu que tingui algun retard abans de fer-lo.

5. En aquest exemple, per veure el servomotor en funcionament, fareu que el servomotor giri un angle de 90º, passat un segon tornarà a la seva posició inicial (0º) i passat un altre segon tornarà a girar 90º. Això ho farà de manera contínua: A dins del bloc “Bucle” col·loqueu el bloc servo amb un gir de 90º. A continuació, de la categoria “Temps”, poseu un bloc d’espera de 1000 mil·lisegons, seguit d’un bloc de gir del servo a 0º i d’una nova espera d’un segon, tal com es mostra a la imatge:
6. Feu clic al botó puja situat a dalt a la dreta, seleccionant el port correcte.

7. D’aquesta manera, esteu treballant amb el servomotor amb girs amb angles definits. Si voleu que l’angle de gir depengui d’algun altre paràmetre, podeu crear una variable i fer que l’angle de gir depengui del valor d’aquesta variable. Per exemple, si voleu que el servomotor giri 5º cada vegada que toqueu un polsador, podeu fer el següent: Connecteu un polsador (KS0029) a un pin de la placa (a l’exemple, el connectem al pin D3).
8. Des de la categoria “Variables”, creeu una variable del tipus nombre (a l’exemple l’anomenem “gir”). A continuació, situeu el bloc “Establir gir=0” dins del bloc “Inicialitzar”, d’aquesta manera, el valor inicial de la variable serà 0. Poseu un bloc de la categoria “Lògica” “Si…fer” al bloc “Bucle”. A continuació del “si”, col·loqueu el bloc “Polsador” que trobareu a la categoria “Sensors” i trieu el pin on el tingueu connectat (a l’exemple, el pin 3). A continuació del “fer” actualitzareu el valor de la variable “gir”, sumant-li 5º. Per fer-ho, de la categoria “Variables”, escolliu el bloc “Establir gir” i a continuació, de la categoria “Matemàtiques” trieu un bloc de suma i a dins poseu-hi la variable “gir” més 5. Per últim, feu que el servomotor giri segons el valor d’aquesta variable, tal com es mostra a la imatge:

9. Feu clic al botó “Puja” situat a dalt a la dreta, seleccionant el port correcte.
