PRI
Tercer cicle
(5è-6è)
Descripció de l’activitat
Per tal de fomentar la conservació i protecció dels diferents ecosistemes terrestres, com ara els boscos i les platges, proposem construir un prototip amb Lego Spike Prime, es crearà un vehicle amb pinces capaç de recollir la brossa i les deixalles d’aquests espais.
Material necessari
- Lego Spike Prime.
- Cartolines de diferents colors.
- Materials per simular residus (per exemple, una ampolla de plàstic).
Orientacions pedagògiques
És convenient que l’alumnat ja conegui els materials constructius LEGO. Si no és així, cal preveure que l’activitat pot necessitar més temps per ser completada.
Es recomana treballar en grups de 3-4 alumnes, amb els espais ben definits i delimitats.
Si l’activitat no s’acaba en una sessió, convindrà preveure on guardar les propostes sense acabar.
Convé reservar una estona en finalitzar la sessió perquè es pugui recollir de forma ordenada, i guardar els diferents components al seu lloc.
Elements de programació
- Seqüències bàsiques
- Bucles
- Condicionals
- Variables
- Programació per blocs (vertical)
Eix | Àrea | Matèria
PRI – Coneixement del Medi Natural, Social i Cultural
Competències específiques
CE06 – Analitzar críticament les causes i conseqüències de la intervenció humana en l’entorn integrant els vessants social, econòmic, cultural, tecnològic i ambiental definits en els objectius de desenvolupament sostenible, per tal de promoure la capacitat d’afrontar els problemes, aportar solucions i actuar de manera individual i col·laborativa en la seva resolució, posant en pràctica hàbits de vida i de consum responsable i sostenible.
Sabers
Valoració d’actuacions que contribueixen a la consecució dels objectius de desenvolupament sostenible en l’orientació que donem al nostre estil de vida.
![]()
![]()
![]()
![]()
En aquesta activitat construireu amb Lego Spike Prime un prototip de vehicle que pugui recollir la brossa de diferents ecosistemes terrestres

Primer de tot, podeu buscar notícies i informació sobre la brutícia als boscos i a les platges, i la importància de reduir els residus generats en aquests espais per tal de protegir la biodiversitat.
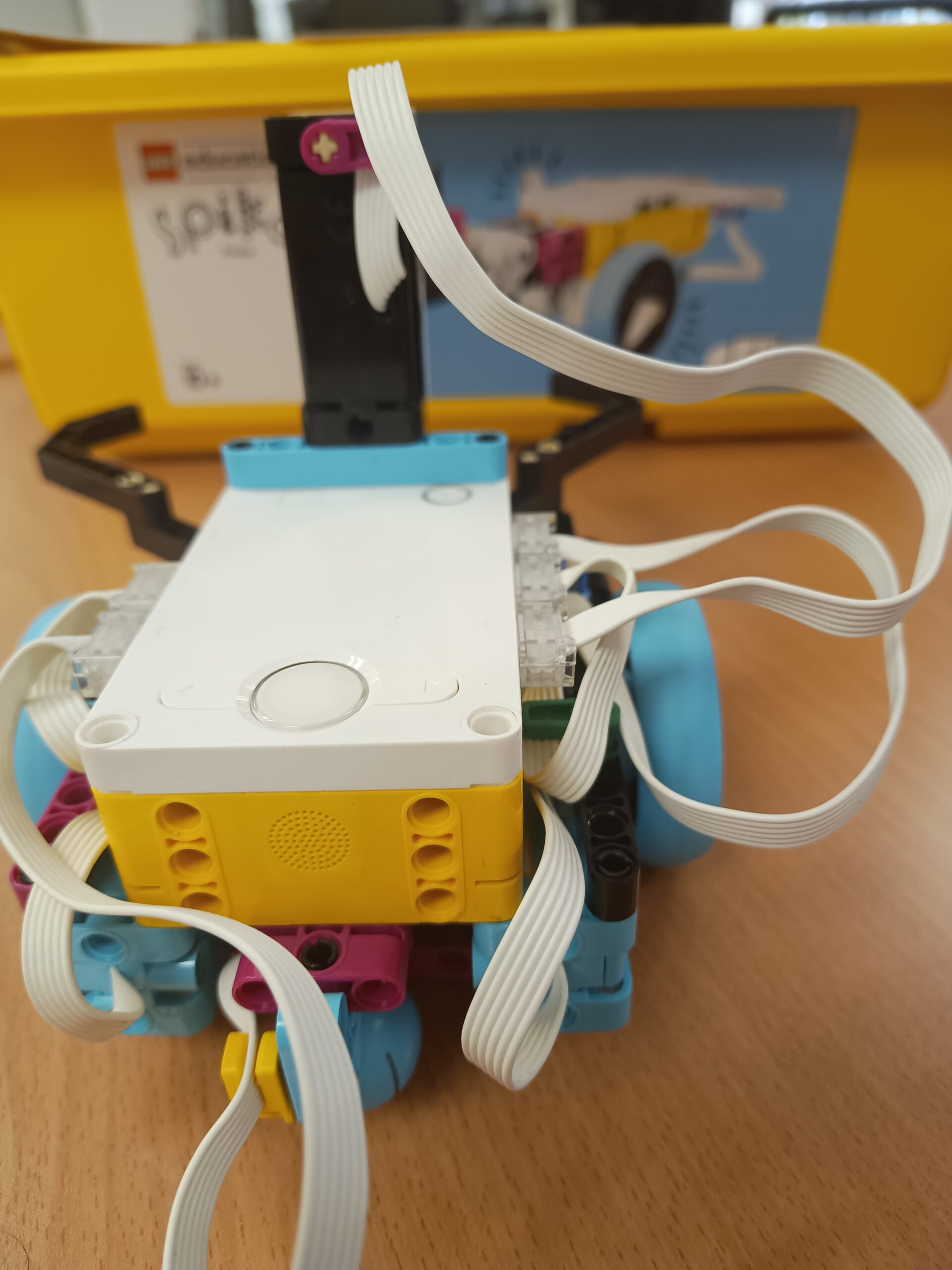
Construcció
1. Dureu a terme la següent base de conducció seguint les instruccions de muntatge de la pàgina web de lego.spike.education.
2. En les instruccions de muntatge, fareu les següents modificacions:
- En el pas 15, en comptes d’utilitzar una barra negra de 15 forats, fareu servir una barra de color rosa de 12 forats.
- No fareu ni el pas 27 ni el pas 28. És a dir, no fareu servir ni la peça de color vermell ni l’engranatge de color negre.
3. Posareu el sensor de color a la barra de color negre del costat dret del vehicle. Podeu seguir les següents indicacions de muntatge.
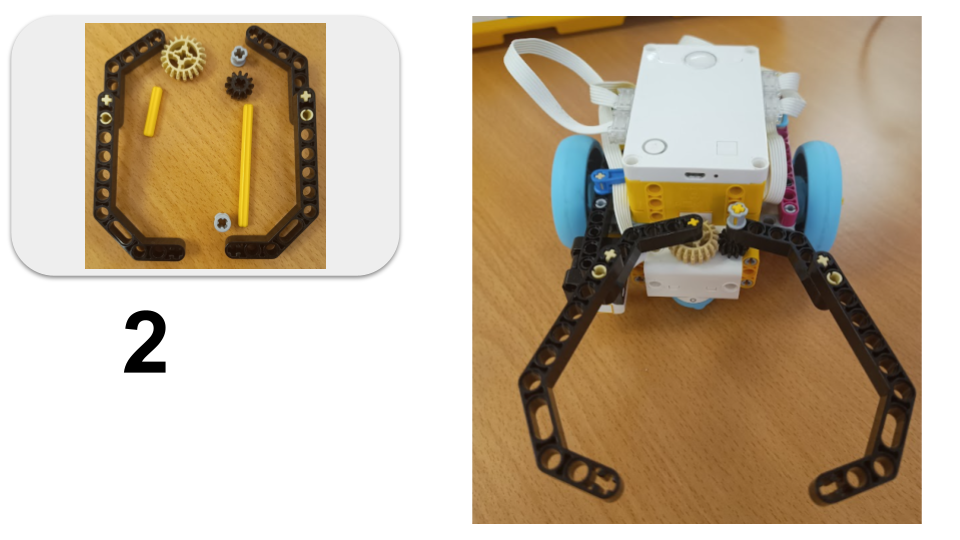
4. Posarem les pinces al robot.
- Construireu les pinces del robot.
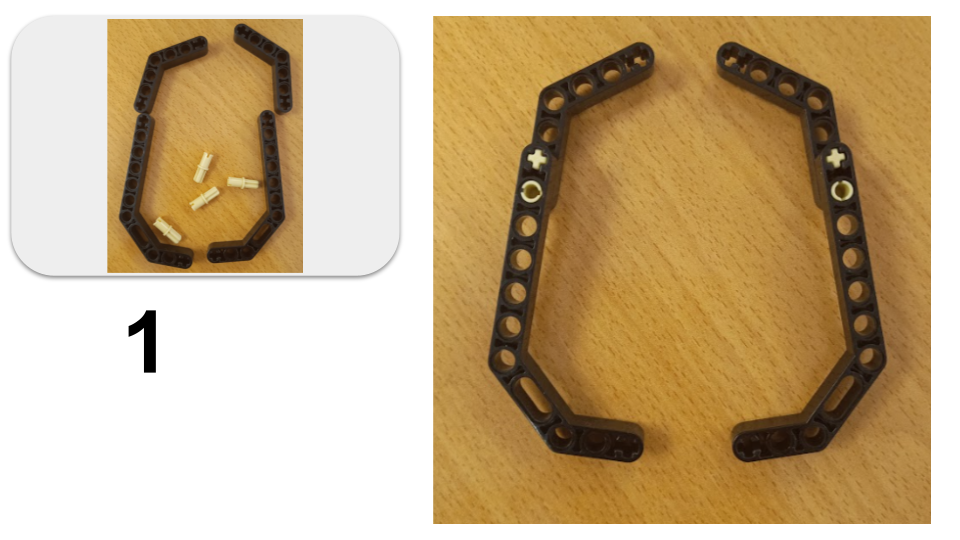
- Afegireu les pinces al robot.
5. Posareu el sensor d’ultrasò al robot.
- Primer col·locareu la barra on anirà el sensor d’ultrasò.
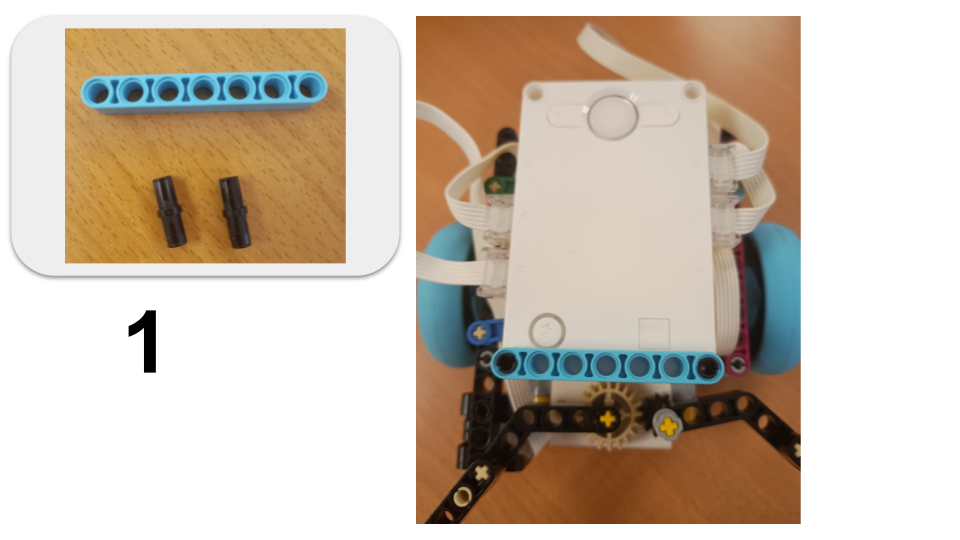
- Seguidament, col·locareu el sensor a la barra.
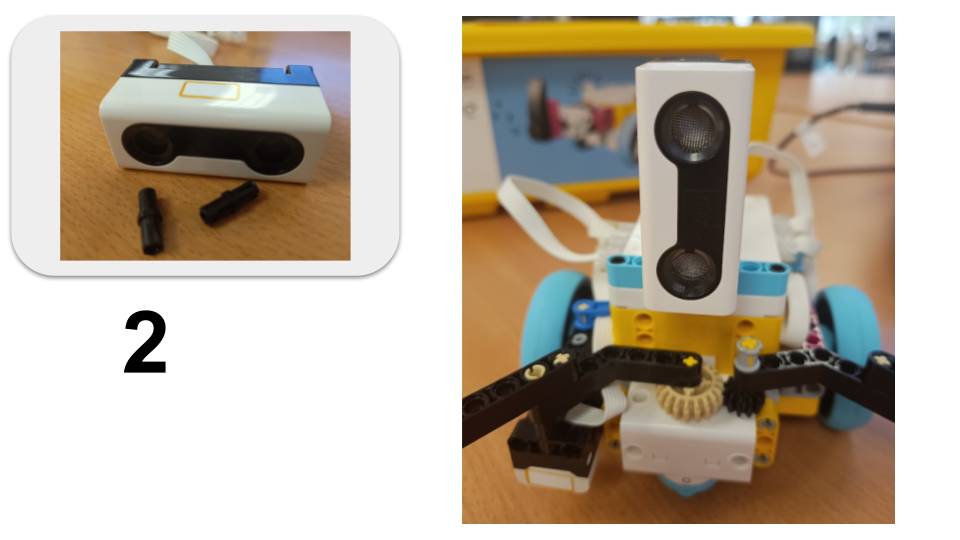
- Finalment, connecteu el cable del sensor d’ultrasò i col·loqueu una pinça per subjectar el cable del sensor.
Programació
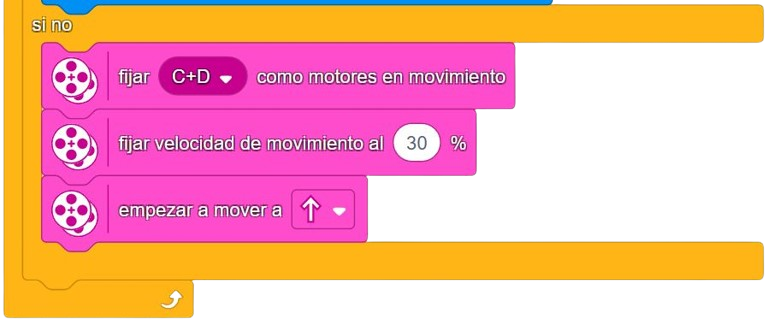
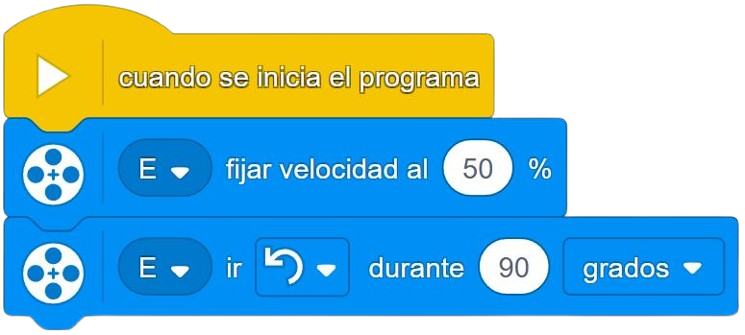
1. Primer de tot, a l’inici del programa, fixareu la velocitat de les pinces al 50% i fareu que estiguin obertes.
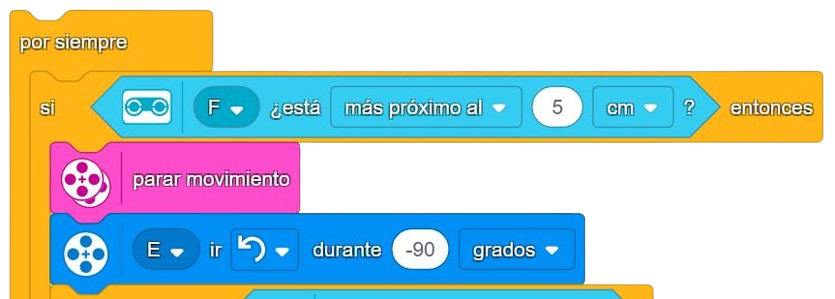
2. Feu que si el robot detecta un residu proper, deixi d’avançar i tanqui les seves pinces per tal d’agafar-lo.
3. Programeu que el robot fins que no trobi la zona per dipositar els residus, mantingui les pinces tancades i es desplaci cap endavant.
* En la nostra proposta de programació, la zona de disposició dels residus, serà una superfície de color negre que el robot detectarà amb el sensor de color.
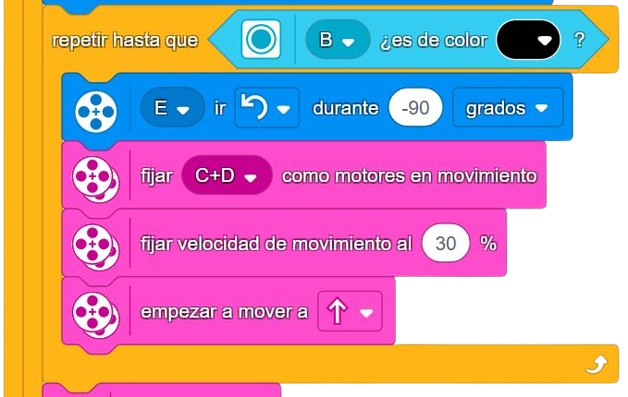
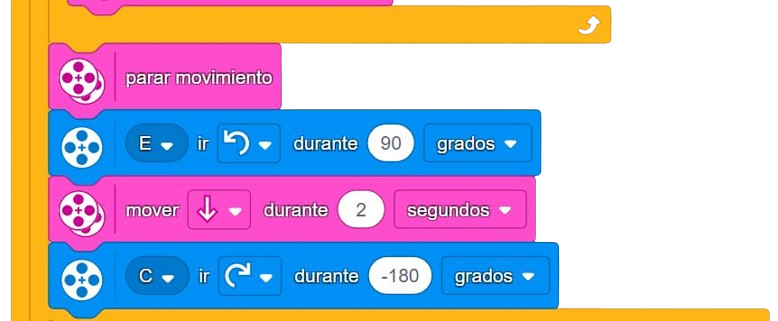
4. Llavors, una vegada el robot hagi trobat la zona per dipositar el residu, fareu que s’aturi, obri les pinces perquè deixi el residu i se’n vagi a la cerca de més residus
6. En canvi, si el robot no detecta cap residu, fareu que es desplaci fins que en detecti algun.