


Amb l’ajuda del vostre robot i després d’enviar la seqüència correcta de colors, heu aconseguit desactivar l’escut protector del planeta Xeldon, acostant-vos així al laboratori on tenen retinguda la Dra. Snippet. Però ara us heu trobat amb un nou obstacle: un laberint ple de trampes i perills!
Per sort, heu demostrat tenir molts recursos, així que segur que trobareu la manera d’introduir el robot al laberint perquè pugui superar tots els obstacles, arribar a l’altra banda i tocar el botó que desactiva els perills. Un cop hàgiu pitjat el botó, podreu passar sense cap risc.
La Dra. Gina Snippet us espera… Som-hi!
 Escolliu el vostre robot
Escolliu el vostre robot


Sensors de distància amb infraroigs
Per començar, mireu de respondre aquestes preguntes:
🔎 El robot té sensors de distància per infraroig?
🔎 Si en té, on són?
🔎 Com es programen?


Què necessiteu?
La missió la fareu preferiblement a terra. Necessitareu:
✅ El robot Dash.
✅ Cinta adhesiva americana, o similar, de color negre.
✅ Peces de construcció tipus Lego Duplo o peces Kapla.
Preparació de la missió
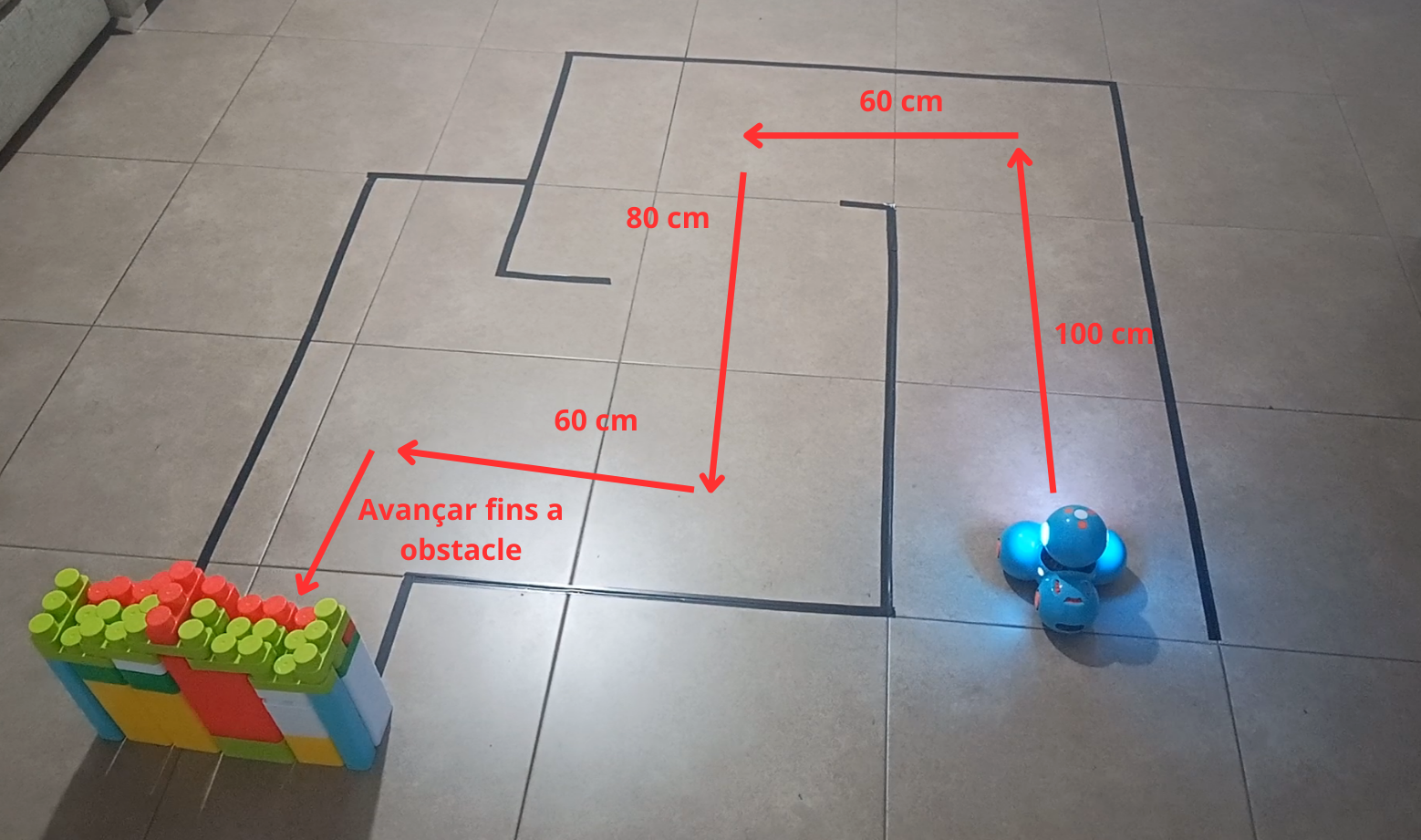
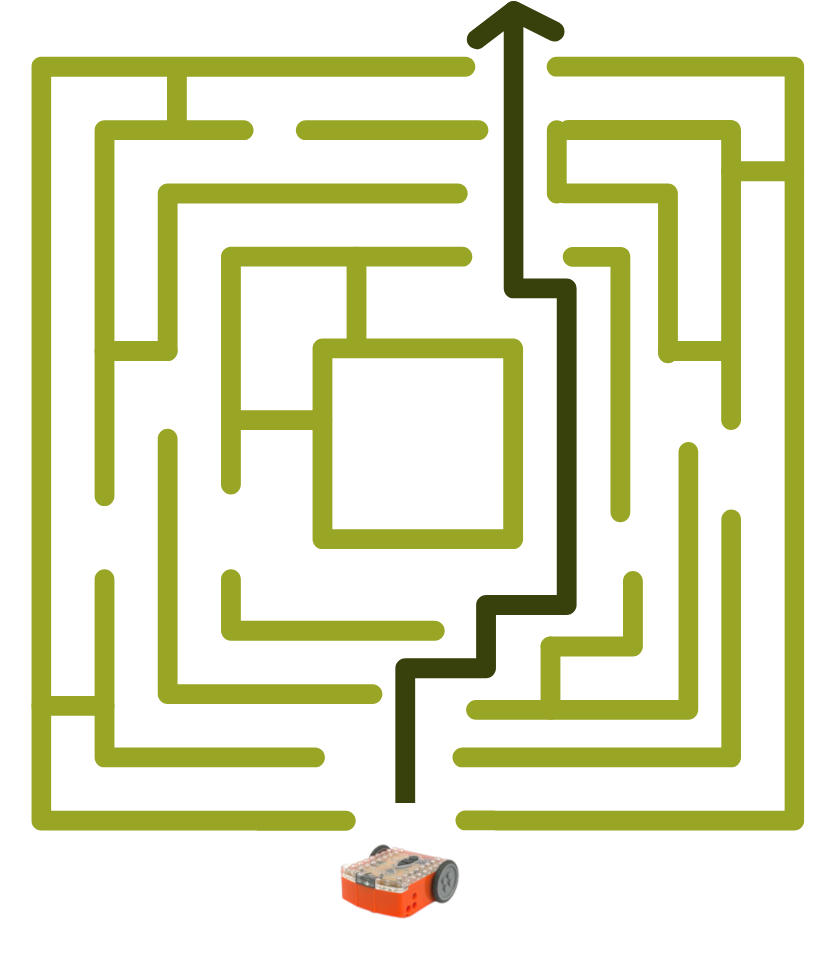
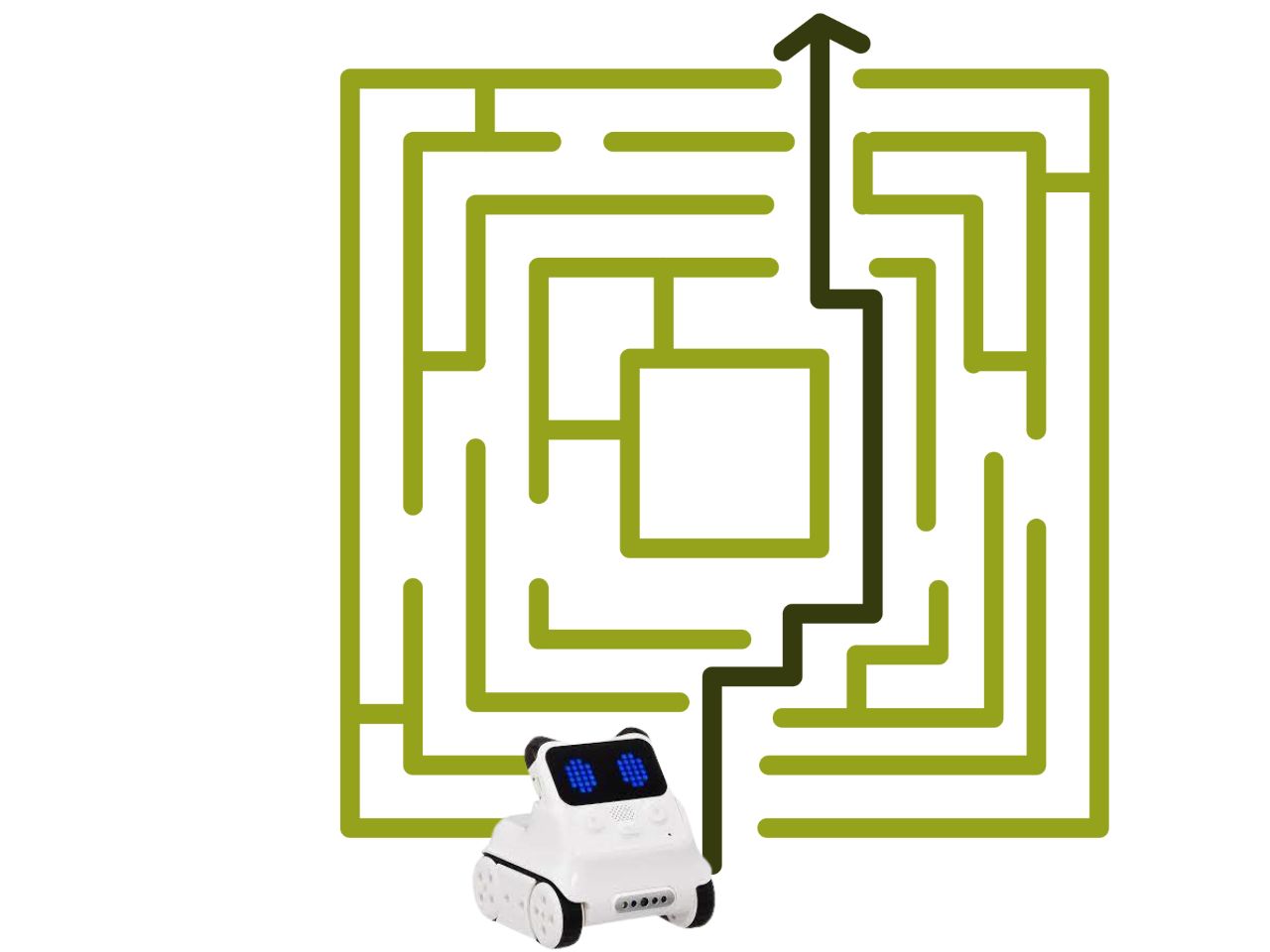
Programareu el robot Dash perquè pugui sortir del laberint. Haureu de tenir en compte les distàncies dels passadissos del laberint i els girs que haurà de fer el robot.
Hem preparat dos laberints:
- En el primer, en el que a la sortida hi ha un arc.
- En el segon, en el que a la sortida hi ha un arc amb una paret.
El robot Dash haurà de completar el laberint i quan ho hagi fet dirà “Bien!”, encendrà els llums de color verd, i farà un ball de celebració.
A continuació, podeu veure dos vídeos demostratius del repte.
En el primer, el robot Dash, en arribar a la meta, es troba un arc, i l’últim desplaçament que fa és de 60 cm.
En canvi, en el segon vídeo, en arribar a la meta el robot es troba un arc amb una paret. El Dash avançarà endavant fins que trobi l’obstacle, utilitzarà el seu sensor de distància i després farà les accions de celebració per haver superat el laberint.
Programació del robot
El robot Dash es pot programar perquè avanci cap endavant en centímetres, en trams de 10 en 10 centímetres i a diferents velocitats (molt lent, lent, normal, ràpid i molt ràpid).
També es pot programar perquè giri a la dreta i a l’esquerra un cert nombre de graus.

Programareu el Dash tenint en compte les distàncies i els girs del laberint.
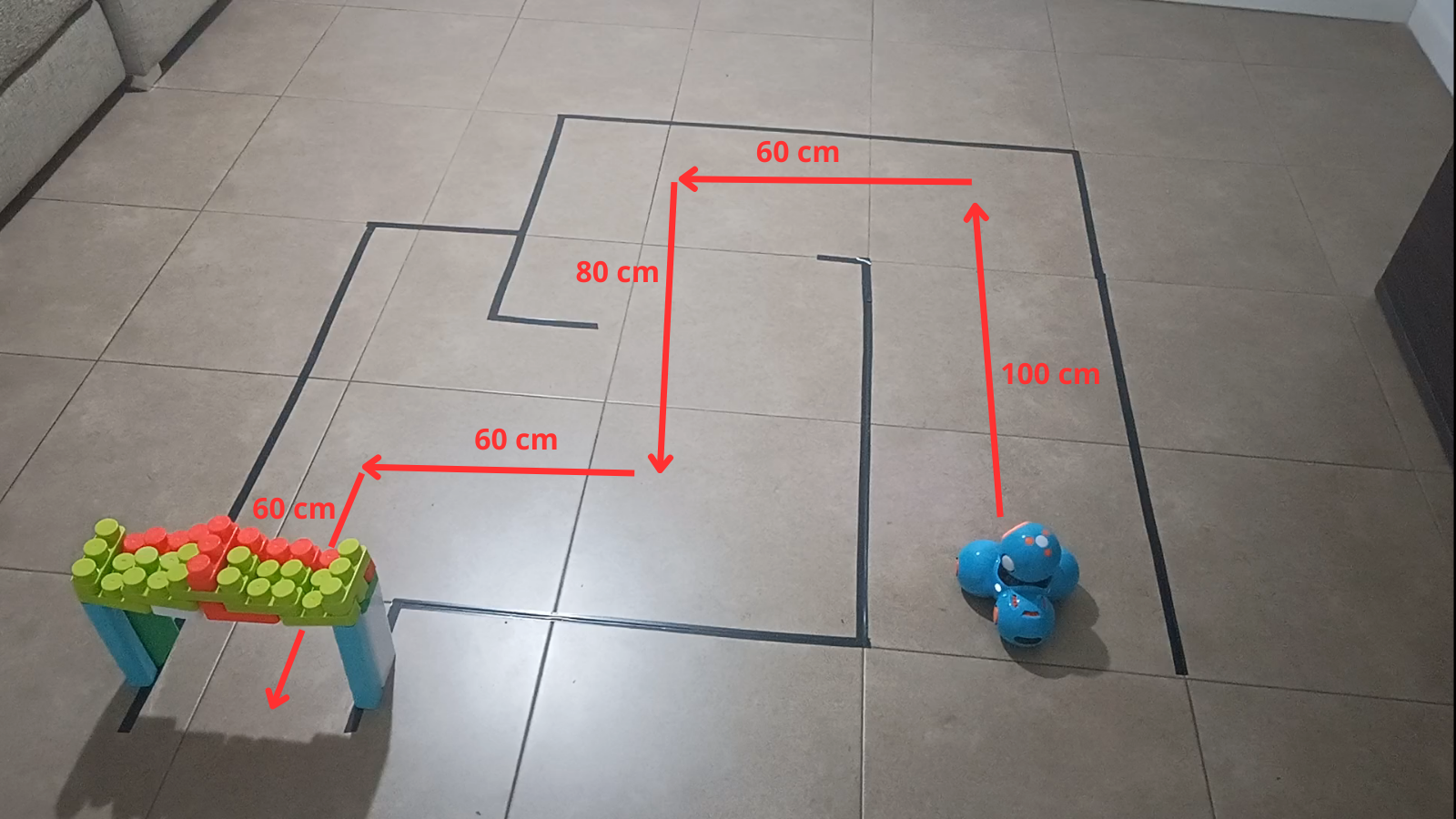
⚠ Compte! Les indicacions que us donem són en relació amb la programació per al model concret de laberint que us estem mostrant.
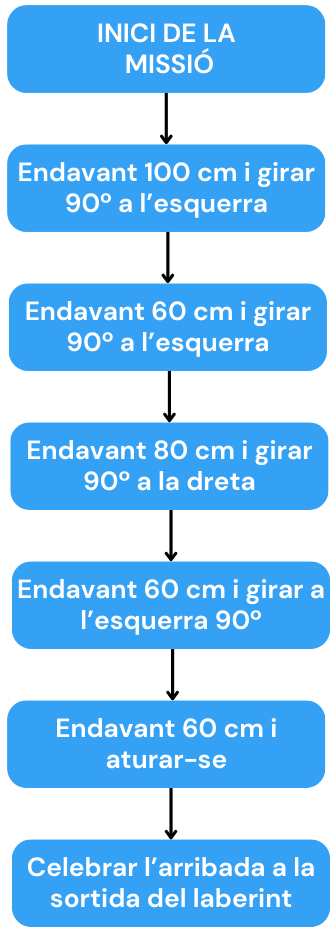
- Quan es premi el botó superior del Dash, fareu que el robot avanci 100 cm endavant i giri 90º a l’esquerra.

- Seguidament, feu que avanci 60 cm endavant i giri 90º a l’esquerra.
- Continueu fent que avanci 80 cm endavant i després giri 90º a la dreta.

- Feu que vagi 60 cm endavant i giri 90º a l’esquerra.
- Per acabar, programeu el robot perquè arribi a la meta.
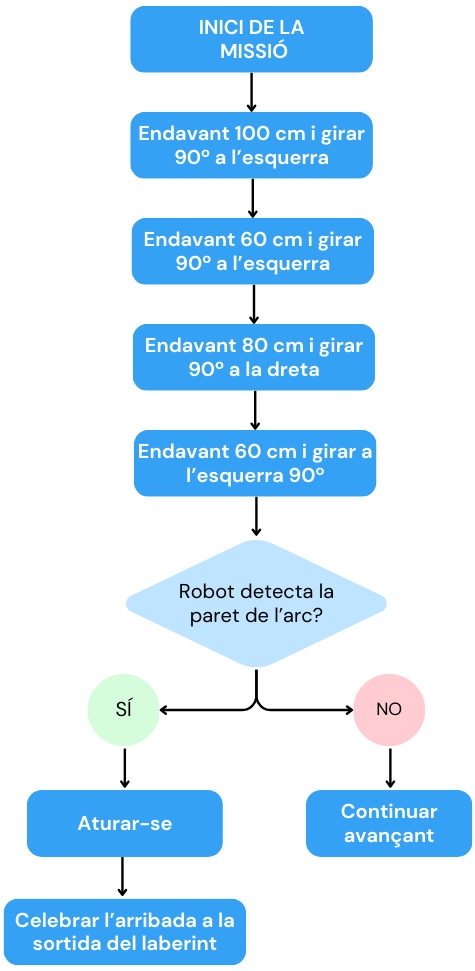
En el cas que l’arc tingui una paret, fareu que el Dash avanci fins que la detecti, si no, fareu que avanci 60 cm i s’aturi.
Arc a la sortida
Arc amb paret a la sortida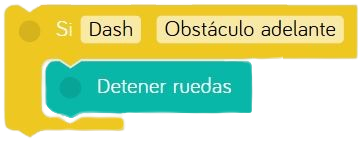
Finalment, el Dash celebrarà que ja ha arribat a la sortida del laberint.
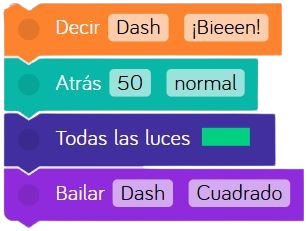
Diagrama de flux
Arc a la sortida
Arc amb paret a la sortida
Blocs recomanats
A continuació us donem algunes idees sobre els blocs de programació de Dash que podeu d’utilitzar:
👉🏾 Esdeveniments (per començar): 
👉🏾 Acció (per moure’s endavant): ![]()
👉🏾 Acció (per girar): ![]()
![]()
👉🏾 Llums: ![]()
![]()
👉🏾 Temps: ![]()
👉🏾 So: 
Recomanacions
🔸 Muntatge
- Abans de començar a programar, mesureu bé les distàncies entre les parets, per evitar que el robot hi topi o les arrossegui quan hi passi per sobre.
🔸 Millores o ampliacions del programa
- Afegiu altres efectes sonors en alguns dels passos de la missió.
- Feu que un grup pensi un laberint diferent i que després un altre grup hagi de fer que el seu robot superi el laberint.


Sensor de seguiment de línia
Per començar, mireu de respondre aquestes preguntes:
🔎 El robot té sensor de seguiment de línia?
🔎 Si en té, on és?
🔎 Com es programa?

Què necessiteu?
La missió la fareu a terra amb el robot Edison. Necessitareu:
✅ El robot Edison.
✅ Cinta adhesiva americana, o similar, de color negre.
✅ Peces de construcció tipus Lego Duplo o peces Kapla.
✅ Cartolina per utilitzar com a superfície per on circuli l’Edison, i així evitar possibles lliscaments de les seves rodes.
Preparació de la missió
En les orientacions que trobareu a continuació s’ha utilitzat EdScratch. Us recomanem que instal·leu l’extensió EdScratchCatalà en el vostre navegador (Chrome o Edge).
Programareu el robot Edison perquè pugui sortir del laberint. Ho podeu dur a terme de dues maneres:
- Fent un càlcul de les distàncies dels passadissos del laberint i els girs que ha de fer el robot.
- Fent que el robot segueixi una línia de color negre fins a la sortida del laberint. El robot utilitzarà el sensor de seguiment de línia.
🔸Programació del robot
- Primer de tot, per tal d’anunciar que l’Edison començarà el laberint, fareu que emeti uns sons i faci un efecte de parpelleig amb els seus llums leds.
Seguidament, començareu a programar l’Edison tenint en compte les distàncies i els girs del laberint.
⚠ Compte! Les indicacions que us donem són amb relació a la programació prenent com a referència el model de laberint que us mostrem com a exemple. Si ho preferiu, podeu crear el vostre propi laberint!
⚠ Atenció! Els girs que ha de fer l’Edison han de ser de 90 graus, per això us recomanem que, per evitar el lliscament de les rodes, el situeu sobre una cartolina.
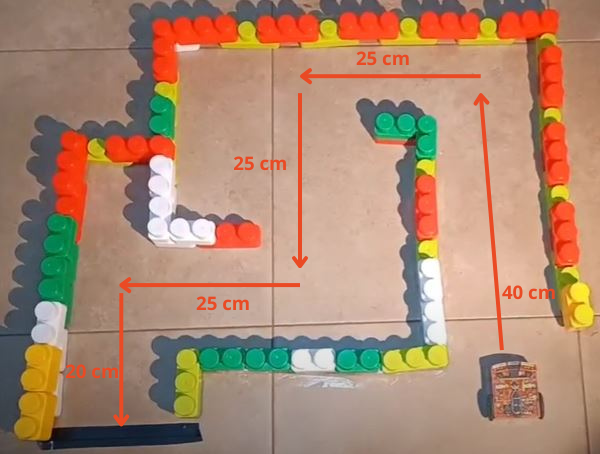
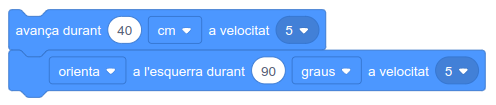
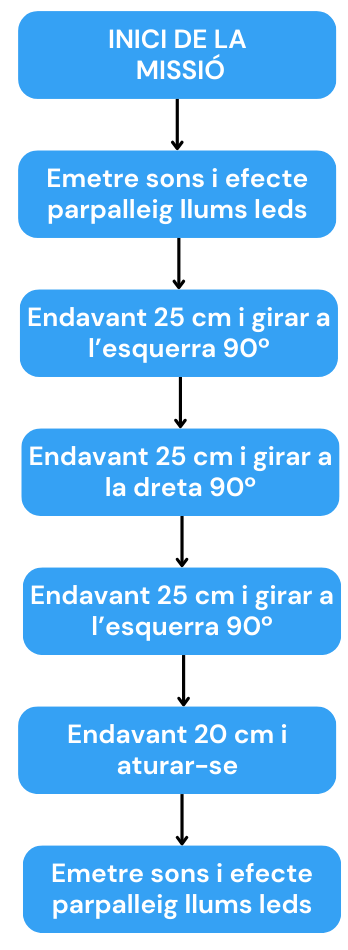
- Primer de tot, fareu que l’Edison vagi endavant 40 cm i giri 90º a l’esquerra.
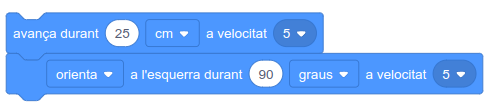
- Seguidament, que avanci 25 cm endavant i giri 90º a l’esquerra.
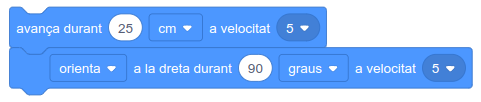
- Feu que avanci endavant 25 cm un altre cop i giri 90º a la dreta.
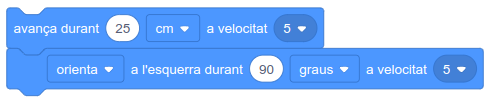
- Feu que torni a avançar 25 cm i giri 90º a l’esquerra.
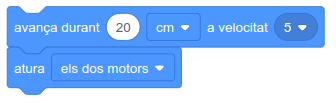
- Programeu l’Edison perquè avanci 20 cm i aturi els motors perquè ja haurà arribat a la sortida del laberint.
- Finalment, feu que l’Edison celebri que ha arribat a la sortida del laberint emetent sons i fent un efecte de parpelleig amb les seves llums leds.
🔸Diagrama de flux
🔸Blocs recomanats
👉🏾 Esdeveniments (en començar):

👉🏾 Moviment (per avançar):

👉🏾Moviment (per orientar el robot):

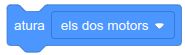
👉🏾 Moviment (per aturar els motors):
👉🏾 Leds (per activar o desactivar els leds):
👉🏾 So (per emetre el so “bip”):

👉🏾 Control (per repetir):

👉🏾 Control (per esperar):
🔸Programació del robot
Fareu que l’Edison, mitjançant el seu sensor de infraroig, segueixi una línia negra feta amb cinta adhesiva americana o similar.
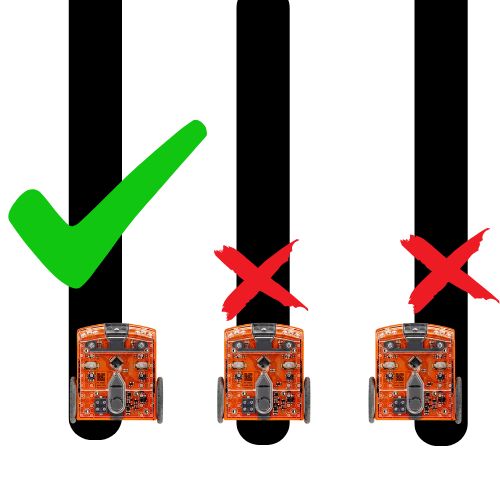
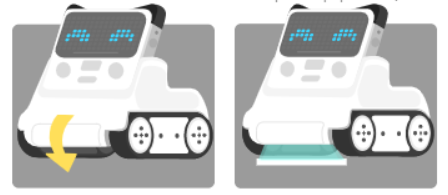
IMPORTANT: La cinta de color negre ha de tenir un gruix gran, com a mínim de 3 cm. Situeu el robot tal com es mostra a la imatge:

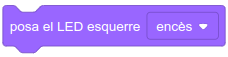
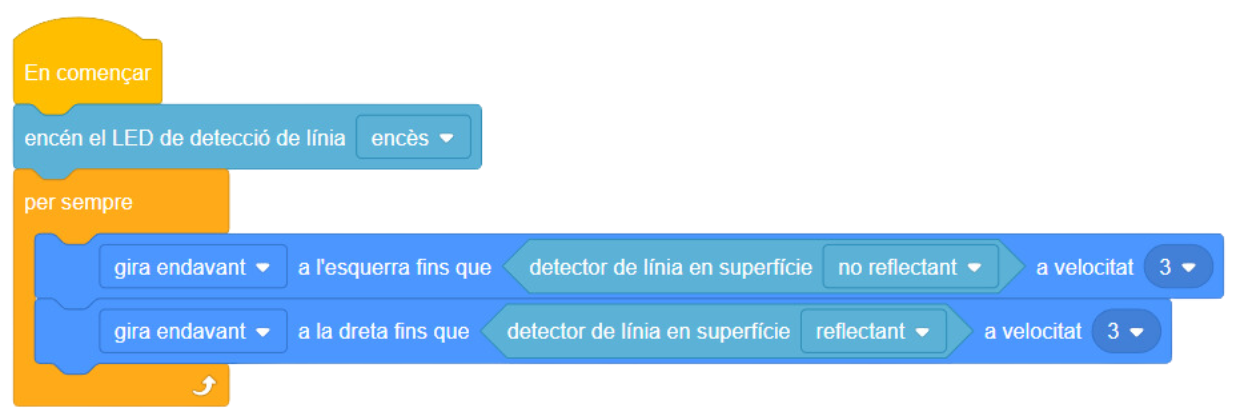
Primer de tot, en iniciar el programa, utilitzareu el bloc “encén el LED de detecció de línia encès” per activar el sensor.
Finalment, haureu de programar l’Edison de manera que, si es troba a la superfície blanca (fora de la línia de color negre) giri cap a l’esquerra fins a estar a sobre de la línia negra que ha de seguir.
En canvi, si l’Edison es troba a sobre de la línia de color negre, que giri cap a la dreta fins que es trobi damunt de la superfície blanca (fora de la de línia de color negre).
D’aquesta manera, com heu vist en el vídeo, l’Edison anirà girant a dreta i esquerra, comprovant constantment el color de la línia i anirà avançant cap endavant.
🔸Blocs recomanats
👉🏾 Esdeveniments (en començar):

👉🏾 Moviment (girar endavant cap a l’esquerra):

👉🏾 Moviment (girar endavant cap a la dreta):

👉🏾 Control (per repetir):

👉🏾 Sensors (activar el detector de línia):

👉🏾 Sensors (detector de línia en superfície reflectant / no reflectant):

Exemples i material de consulta
En aquesta activitat del catàleg de robòtica teniu un exemple de com programar el robot Edison:


Investigueu
Per començar, mireu de respondre aquestes preguntes:
🔎 El robot té sensor de color?
🔎 Si en té, on és?
🔎 Com es programa?
🔎 Com funciona?

Què necessiteu?
✅ El robot Codey Rocky.
✅ Cartolina blanca.
✅ Cinta adhesiva americana de color negre o similar.
✅ Regle per mesurar.
🔸Preparació de la missió
Programeu el robot perquè segueixi la línia de color negre. Per fer-ho, podeu fer servir el sensor de color, però també podeu optar per resoldre el repte movent el robot una distància determinada. Trieu l’opció que vulgueu:
Per fer avançar el robot dins del laberint, podeu utilitzar el sensor de color. Us suggerim que construïu un recorregut en forma de camí de color negre dins del vostre laberint, perquè el robot el pugui seguir. Feu servir cinta de color negre per traçar-lo. Tingueu en compte que el robot fa 10 x10 cm i cal deixar espai perquè giri!
El sensor de color del Codey Rocky es troba a la part frontal inferior del robot i és orientable. Orienteu-lo cap avall perquè pugui llegir bé la línia de color negre sobre el fons blanc del vostre camí.
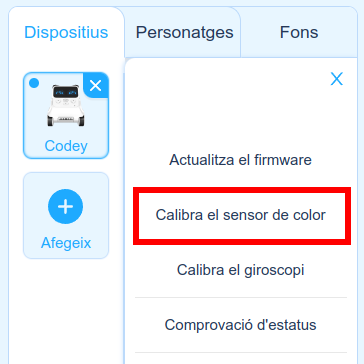
Si el sensor de color del robot detecta amb dificultat el color negre, podeu calibrar-lo. Recordeu que, tant durant la programació com en la calibració, el robot ha d’estar connectat a l’ordinador mitjançant el cable USB i mLink en funcionament.

🔸Programació del robot
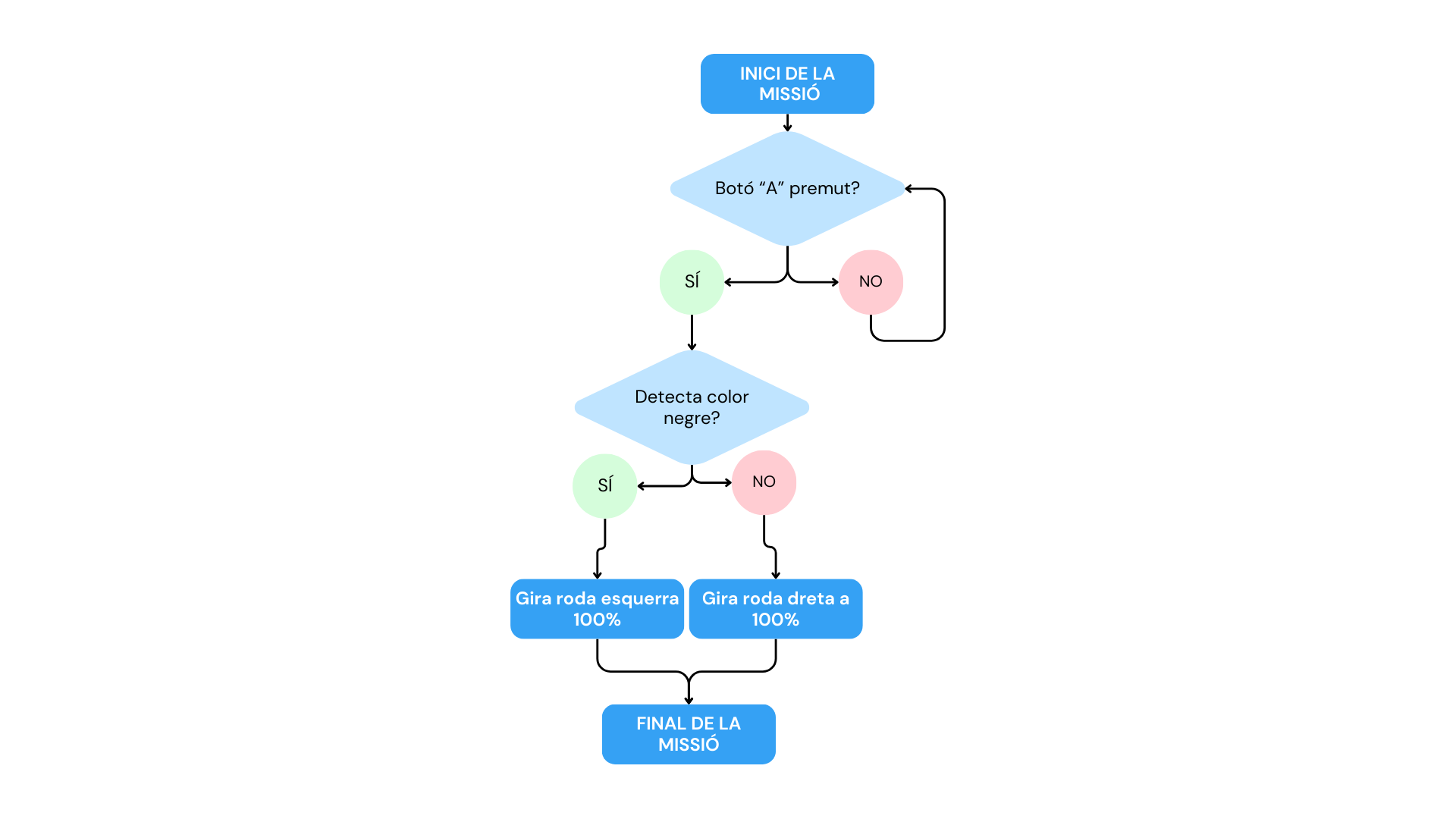
Programeu el robot perquè detecti la línia negra.
Programeu la següent seqüència:
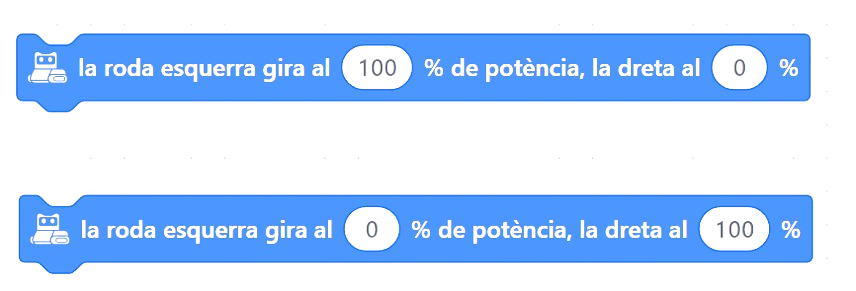
- Si el sensor detecta color negre, feu que giri el motor esquerre cap endavant (amb el motor dret aturat).
- Si detecta color blanc, es mogui el motor dret cap endavant (amb el motor esquerre aturat).
- Amb aquesta programació, el robot anirà movent-se i corregint la trajectòria constantment, per no sortir de la línia negra.
⚠ Alerta! No feu recorreguts massa “rectangulars”, intenteu traçar circuits arrodonits per evitar que el robot hagi de fer girs molt bruscos.
🔸Diagrama de flux
🔸Blocs recomanats
A continuació, us oferim algunes propostes sobre els blocs de programació de mBlock que podeu utilitzar:
👉🏾 Esdeveniments:

👉🏾 Acció :


👉🏾 Control :

Control (bucle per sempre) : 
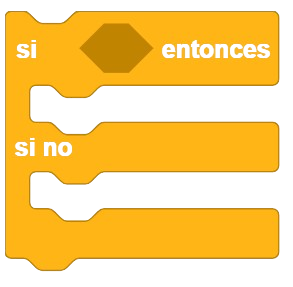
Control (condicional): 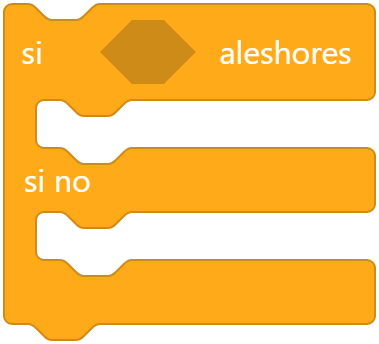
👉🏾 Sensor de color:
![]()
👉🏾 Aspecte:

🔸Programació del robot
El robot Codey Rocky pot moure’s endavant i endarrere. Podem programar que es mogui en una direcció durant uns segons. Haureu d’investigar quants centímetres avança el robot cada segon per poder fer-lo avançar pel laberint.
Per exemple: si fem servir aquest bloc de programació, al 70% de potència, durant 1 segon de temps, quants centímetres avançarà el robot?

En aquest repte, haureu de dissenyar el vostre propi laberint i fer que el robot es desplaci, giri i avanci, aconseguint arribar al final.
Per exemple, podeu fer un laberint com el de la imatge: Però no cal que sigui aquest, el podeu simplificar!
En aquest exemple s’ha dibuixat el laberint sobre una cartolina blanca i s’han mesurat les distàncies que ha de recórrer el robot per després programar-lo. Les rodes del Codey Rocky poden relliscar. Us aconsellem que feu fer servir el robot sobre superfícies poc lliscants, com ara cartolines.
Cal tenir en compte que el robot té unes mides de 10 x 10 centímetres. Per tant, haureu de fer el laberint prou ample perquè pugui avançar i tenir espai per fer els girs (recomanem entre 15 i 20 cm).
Millores del programa:
Podeu fer servir les targetes de color per indicar el final del laberint.
Podeu simular que el robot prem un polsador al final, que desactiva els perills del laberint.
Material de consulta


El sensor de color
Per començar, mireu de respondre aquestes preguntes:
🔎 El robot té sensors de colors?
🔎 Com funcionen aquests sensors?
🔎 Com es programen?

Què necessiteu?
La missió la fareu a terra, amb el robot mBot2. Poseu a terra:
✅ El robot mBot 2.
✅ Un circuit que simuli el laberint que ha de superar el robot, marcat amb color negre.
Cal tenir en compte el gruix de la línia que ha de seguir el robot, i fer servir una pintura negra mate per dibuixar-ho. Per fer les proves inicials podeu fer servir el circuit que incorpora el kit del robot.
Programació del robot
Els sensors de color poden detectar la intensitat de la llum i els colors. El Mbot2 incorpora el sensor Quad RGB, format per quatre sensors de color capaços de detectar colors. Al repte 2 l’has fet servir. Aquest mateix sensor el podem fer servir per detectar el color negre.
En aquest repte haureu de dibuixar un camí de color negre sobre un fons blanc, que faci circular al robot per dins del laberint.
Els sensors RGB es troben a la part inferior davantera del robot i s’anomenen L1, L2, R1 i R2 (L per a la part esquerra i R per a la dreta). Cliqueu al desplegable per tenir més informació d’aquest sensor.
El sensor de color RGB (Sensor Quad RGB)
El xassís del mBot 2 incorpora quatre sensors de color (anomenats sensors Quad RGB). Els quatre sensors són a la part inferior. A la part superior trobareu els noms de cadascun d’ells, per poder identificar i programar els sensors d’una manera específica. Observeu les següents imatges.


Per programar el sensor haurem de fer servir una estructura condicional.
En primer lloc, veurem que pot detectar el robot quan estigui a sobre del laberint i quin moviment haurem de programar perquè no surti del circuit.
Farem servir el bloc de sensor rgb quad amb estatus “línia”. Amb aquest bloc programem els dos sensors situats al centre del robot: L1(esquerre) i R1(dret).

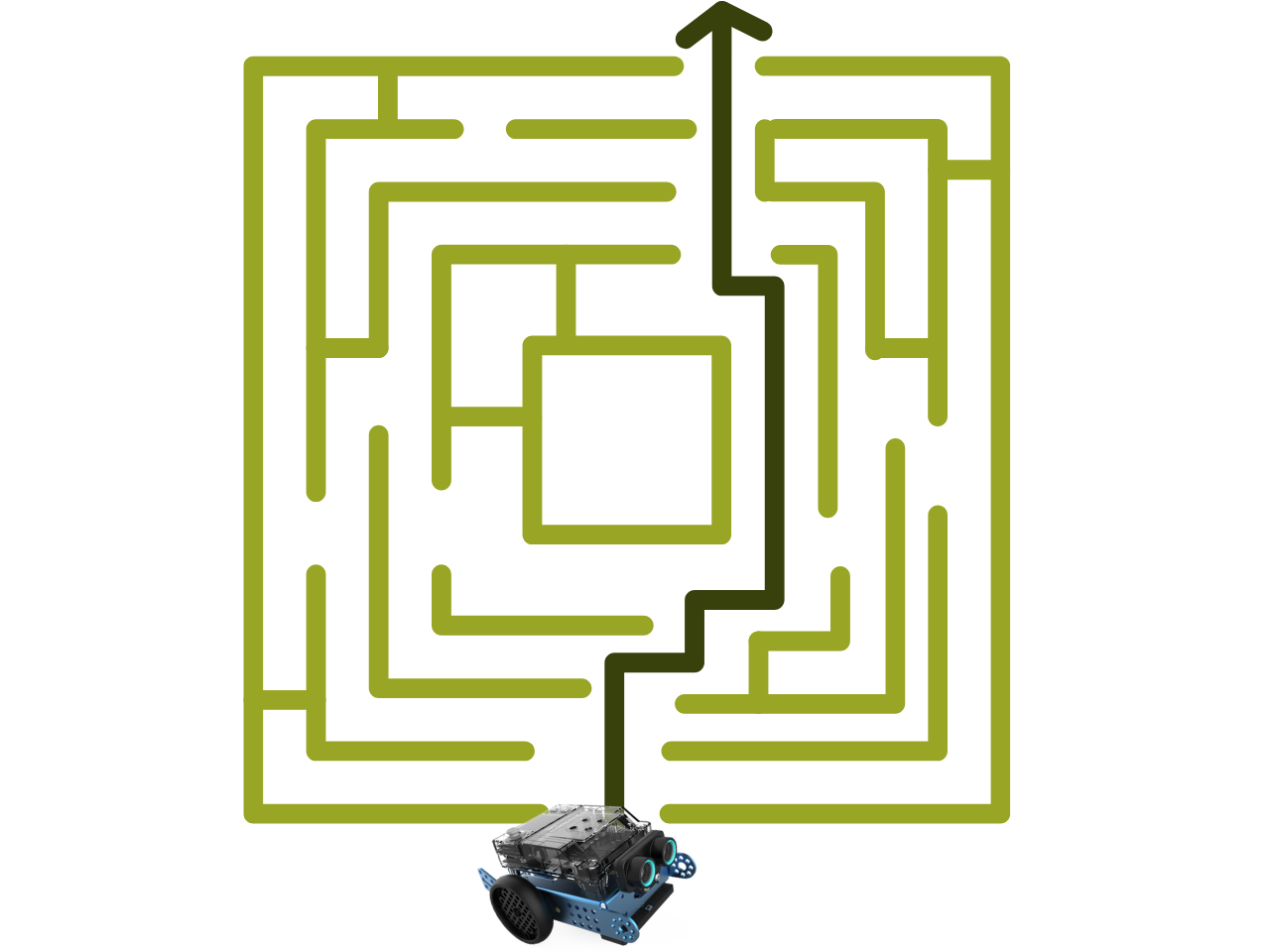
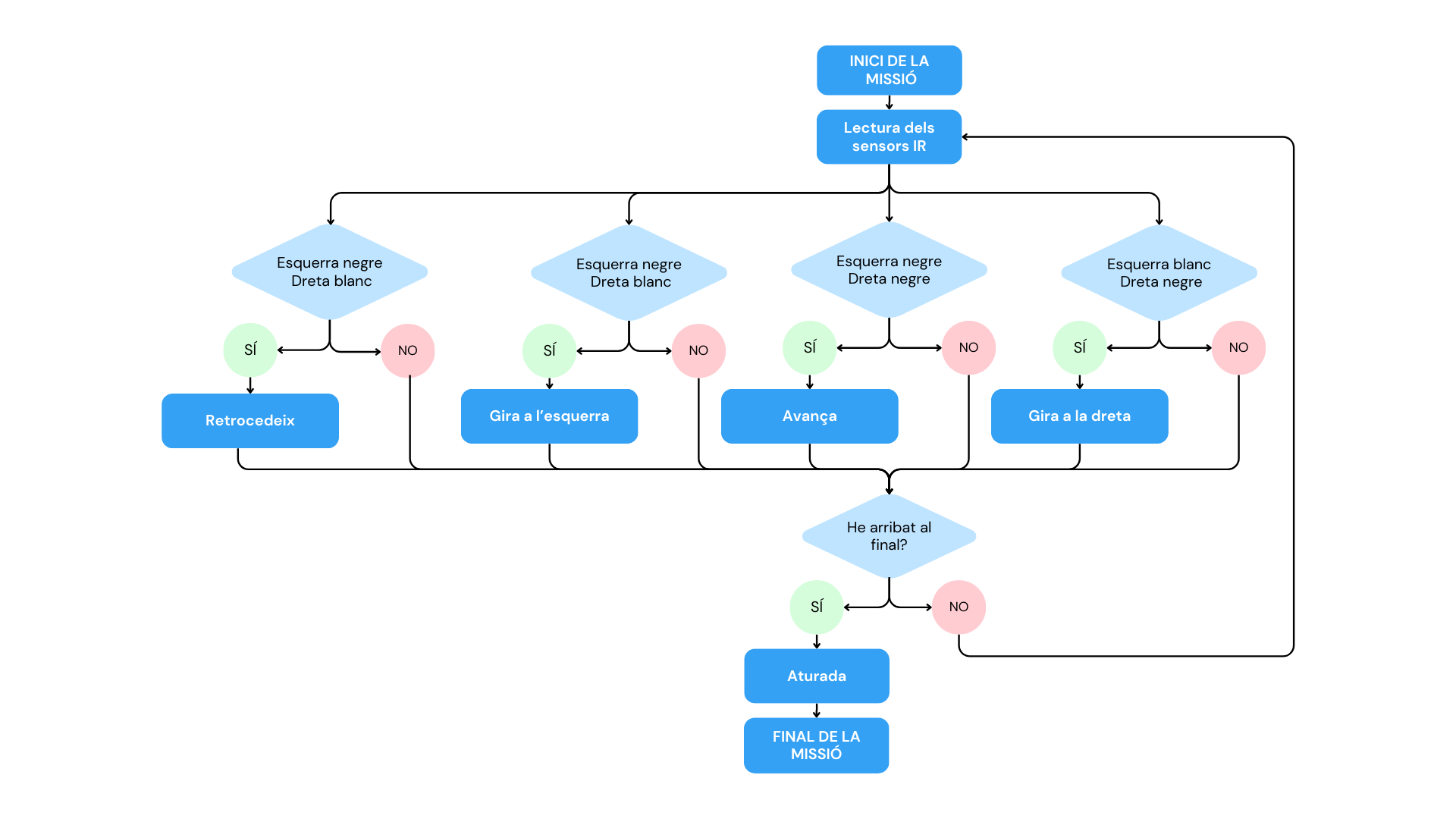
Per programar l’avançament del robot, i fer que segueixi la línia negra, haurem de programar que quan els sensors detectin el color blanc, corregeixin la seva trajectòria per tornar al camí. Farem servir els dos sensors centrals, anomenats L1 (esquerre) i R1 (dret). Si aquests sensors detecten el color negre, el seu valor serà “1” i si detecten color blanc, el valor dels sensors serà “0”. Tindrem, per tant, 3 situacions possibles:
- Si tots dos sensors detecten color negre: el robot està sobre el camí! Haurem de donar la instrucció al robot perquè avanci en línia recta.
- Si tots dos sensors detecten color blanc, el robot ha sortit totalment del camí! Haurem de fer que el robot es mogui marxa enrere per tornar a trobar la línia negra.
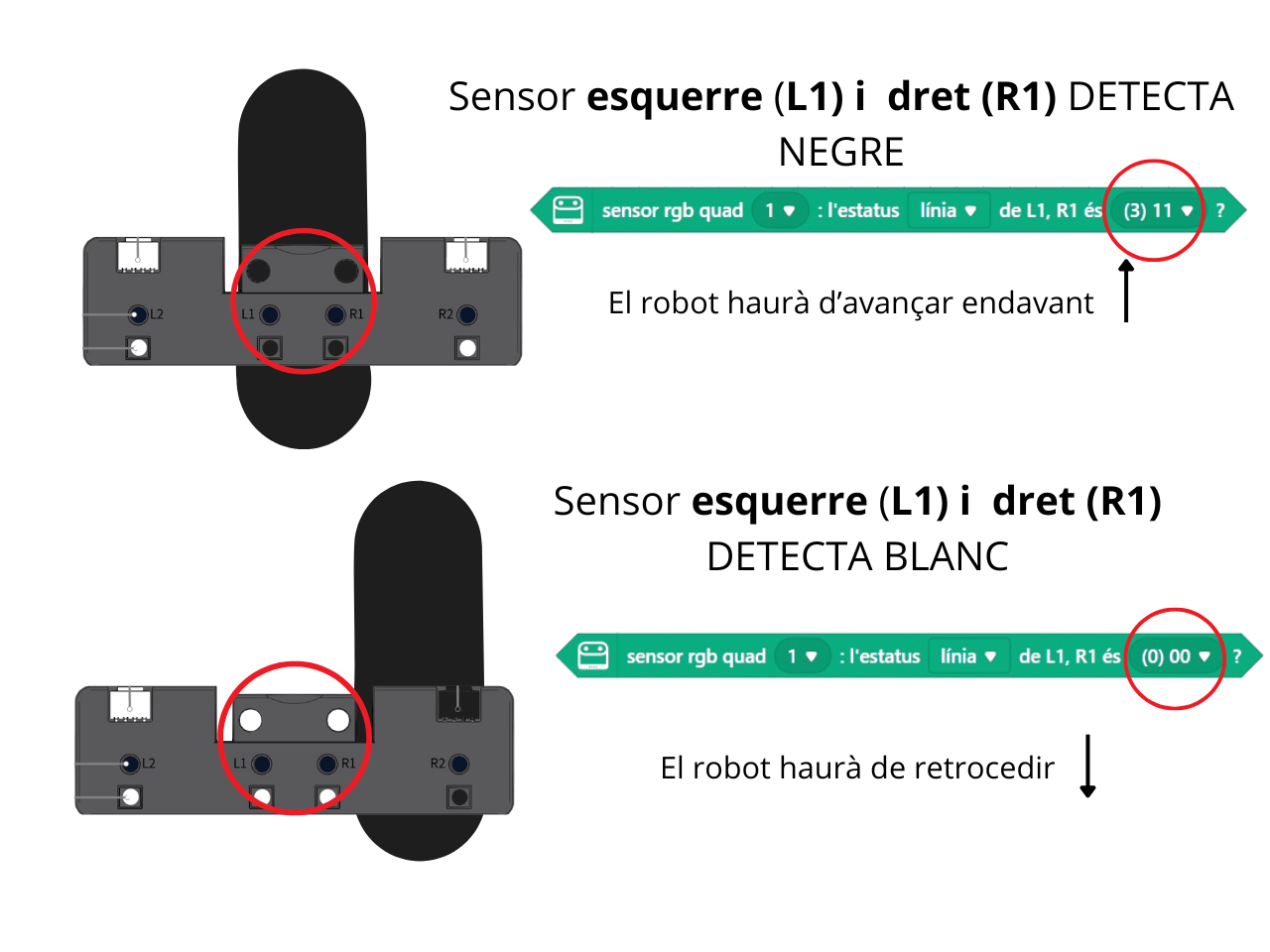
- Si el sensor esquerre detecta color blanc i el sensor dret detecta color negre, el robot està sortint del camí per l’esquerra! Perquè no es desviï de la trajectòria, haurem de donar la instrucció que el robot giri a la dreta i així tornar-lo al camí.
- El contrari del cas anterior; si el sensor dret detecta color blanc, i el sensor esquerre detecta color negre, el robot està sortint del camí per la dreta. Haurem de donar la instrucció que el robot giri a l’esquerra, per fer-lo tornar al camí.
En les següents imatges es representen aquests quatre casos i els blocs que heu de fer servir per programar els sensors:
Blocs recomanats
👉🏾 Control (Bloc condicional): 
👉🏾 Control (bucle de repetició per sempre): 
👉🏾 Sensor Quad RGB (condició de detecció de color):

👉🏾 Xassís mBot2 (Moviment):




Diagrama de flux
Podem moure el robot pel laberint fent servir els blocs de moviment i mesurant les distàncies.
En aquest cas, per superar el repte haureu de construir, en primer lloc, el laberint i registrar les distàncies que s’ha de moure el robot.
A la següent imatge, podeu veure una proposta per un laberint. Podeu fer el vostre propi mesurant les distàncies que ha de recórrer el robot:
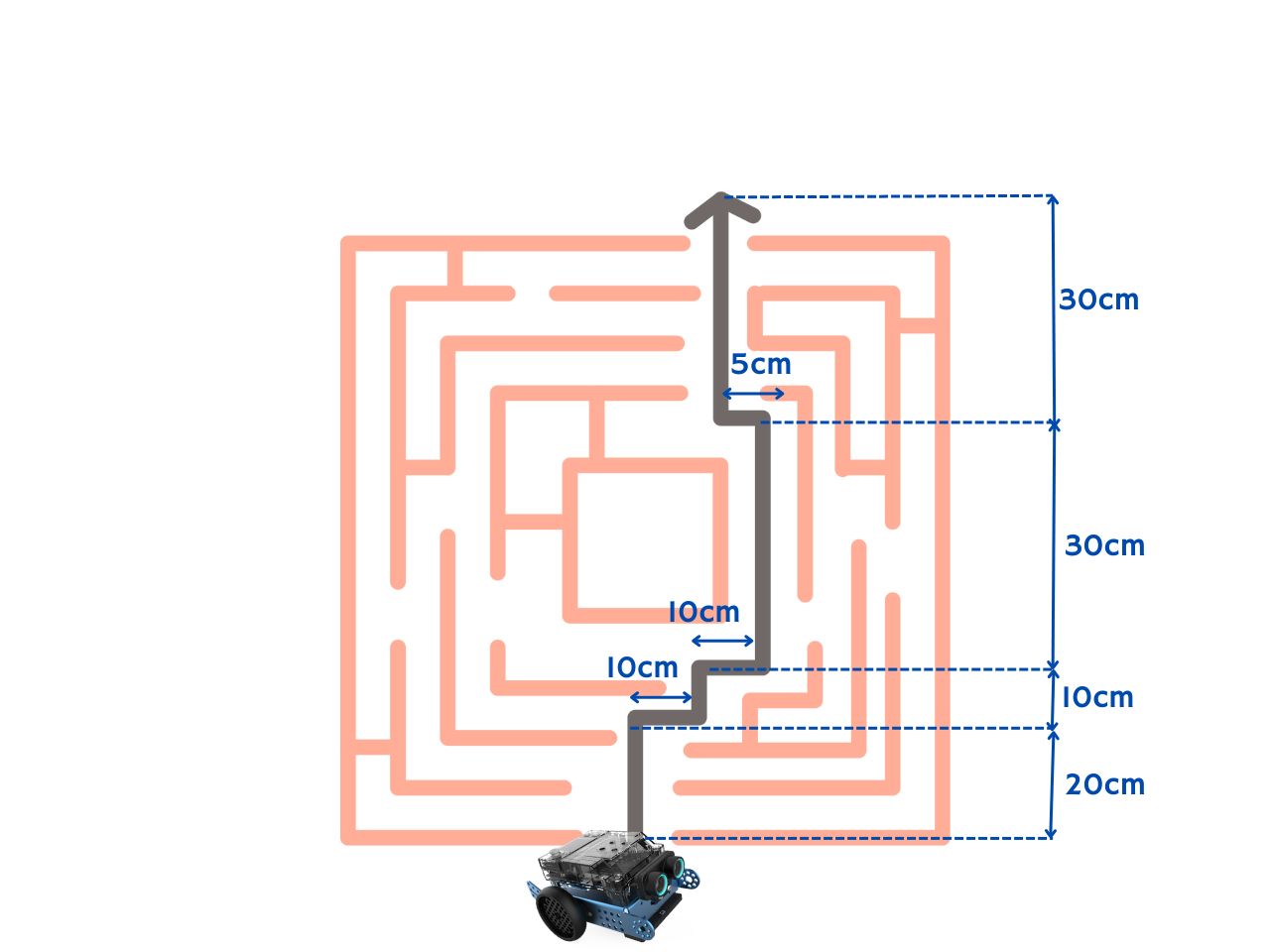
En l’exemple del dibuix, farem avançar el robot pel laberint, indicant la distància en centímetres que s’ha de moure. Un exemple per aquest laberint seria el següent:

Recomanacions
🔸Completeu el programa (opcional)
Afegiu més accions al vostre robot! Us donem algunes idees:
- Feu que el robot celebri l’èxit de la missió.
- Feu que el robot accioni un polsador en arribar al final del laberint, per desactivar els perills i deixar passar als nens.
- Afegiu efectes sonors.
Exemples i material de consulta


El sensor de color
El conjunt LEGO SPIKE Essential no té sensor d’infraroigs. En aquesta ocasió, el repte consisteix a dissenyar un dispositiu per seguir una línia negra. Com que no teniu un sensor d’infraroigs, ho fareu utilitzant el sensor de color.
Què necessiteu?
✅ Conjunt LEGO SPIKE Essential (hub, peces de construcció, sensor de color i matriu de leds).
✅ Cinta adhesiva de color negre.
Construcció del dispositiu
Haureu comprovat que el LEGO Spike Essential té un sensor de color que pot detectar 8 colors, però que també pot detectar la quantitat de llum reflectida per la superfície que té al davant. En aquest cas, utilitzarem aquesta funcionalitat.
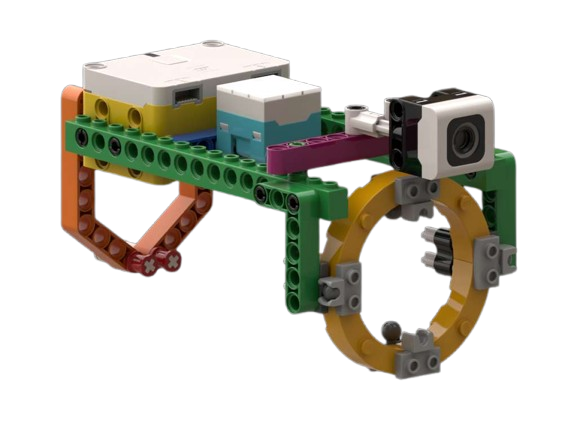
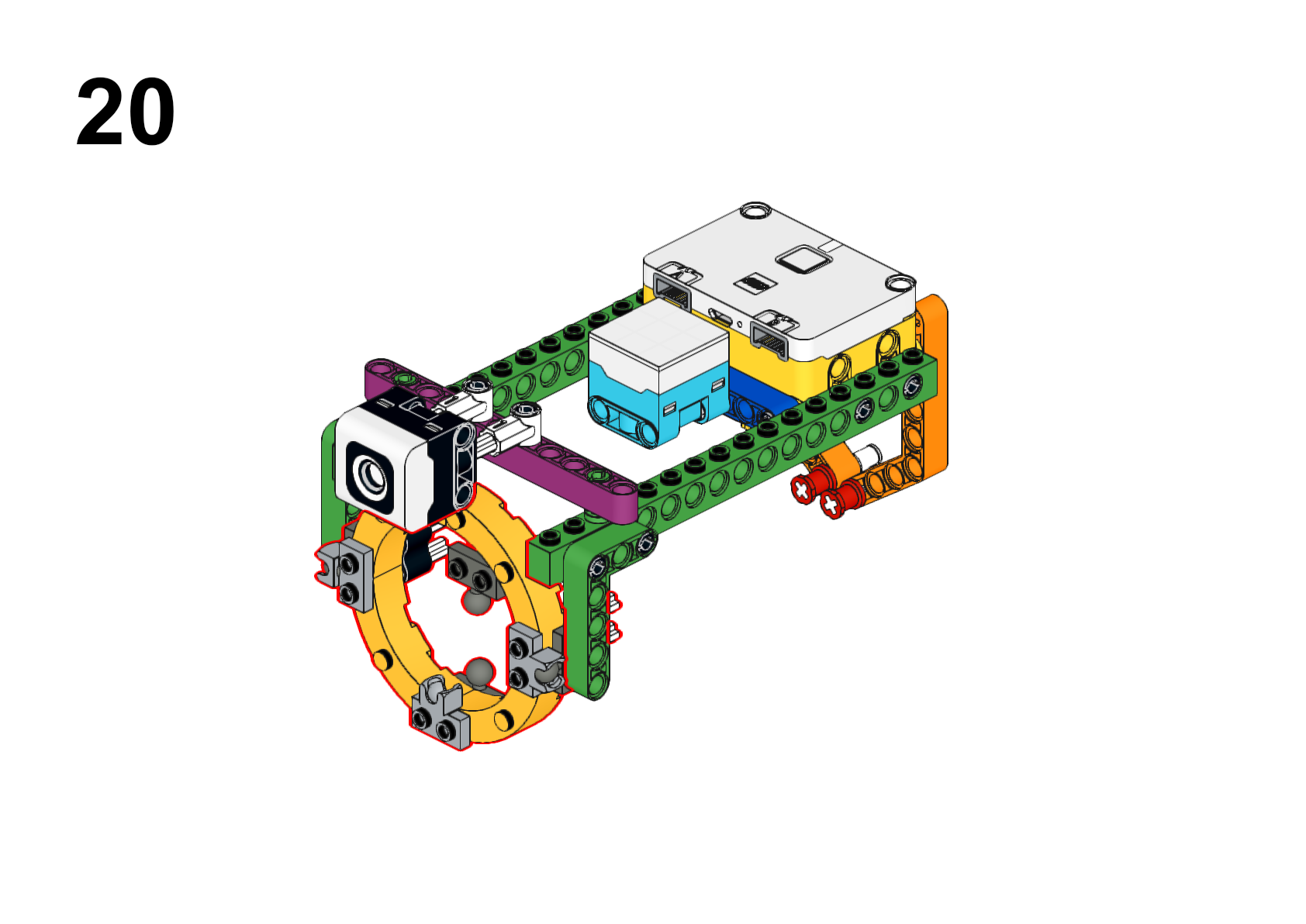
En aquest repte, construireu un dispositiu que us ajudi a seguir una línia de color negre dibuixada a una paret. Us oferim un exemple d’un braçalet.

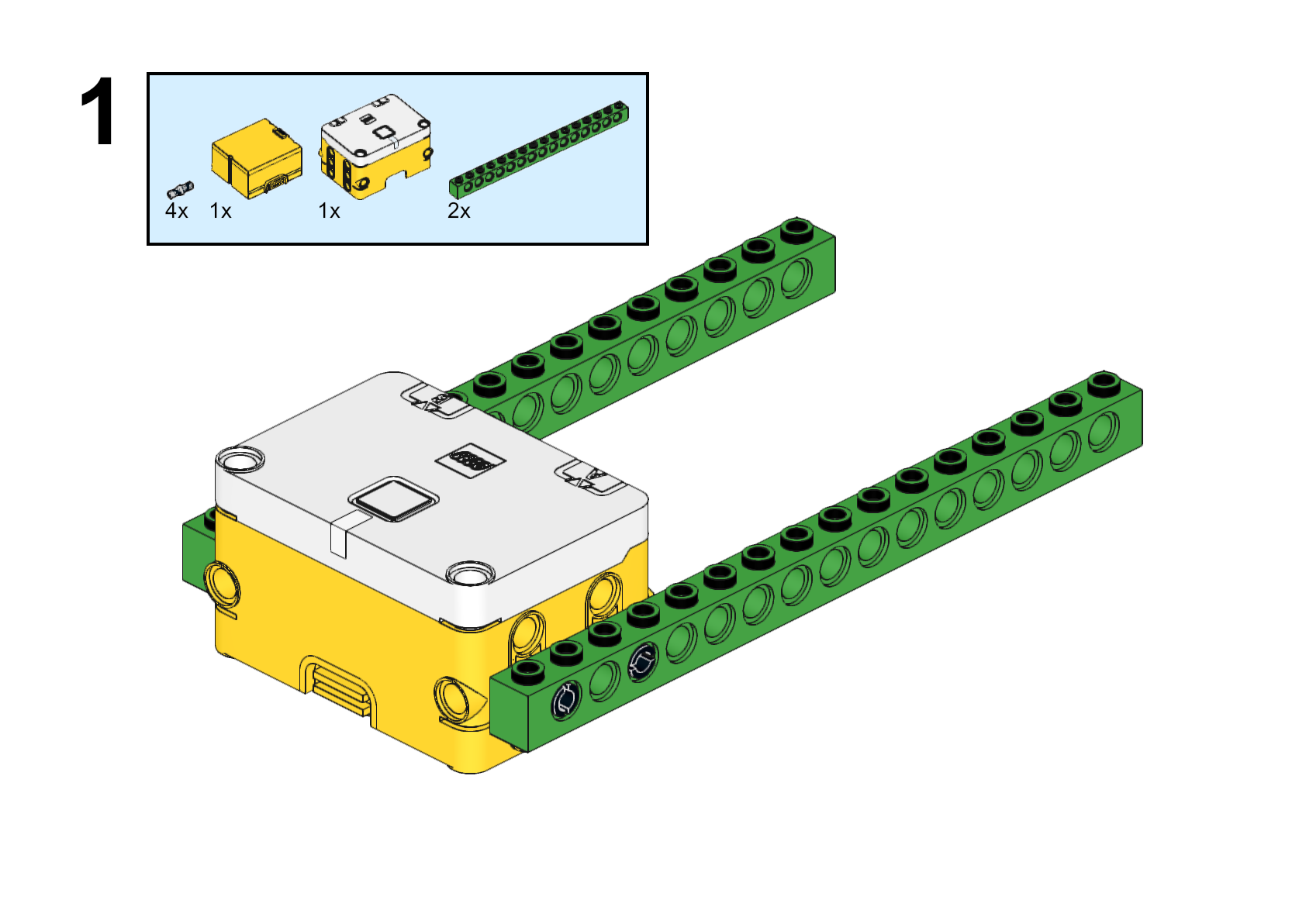
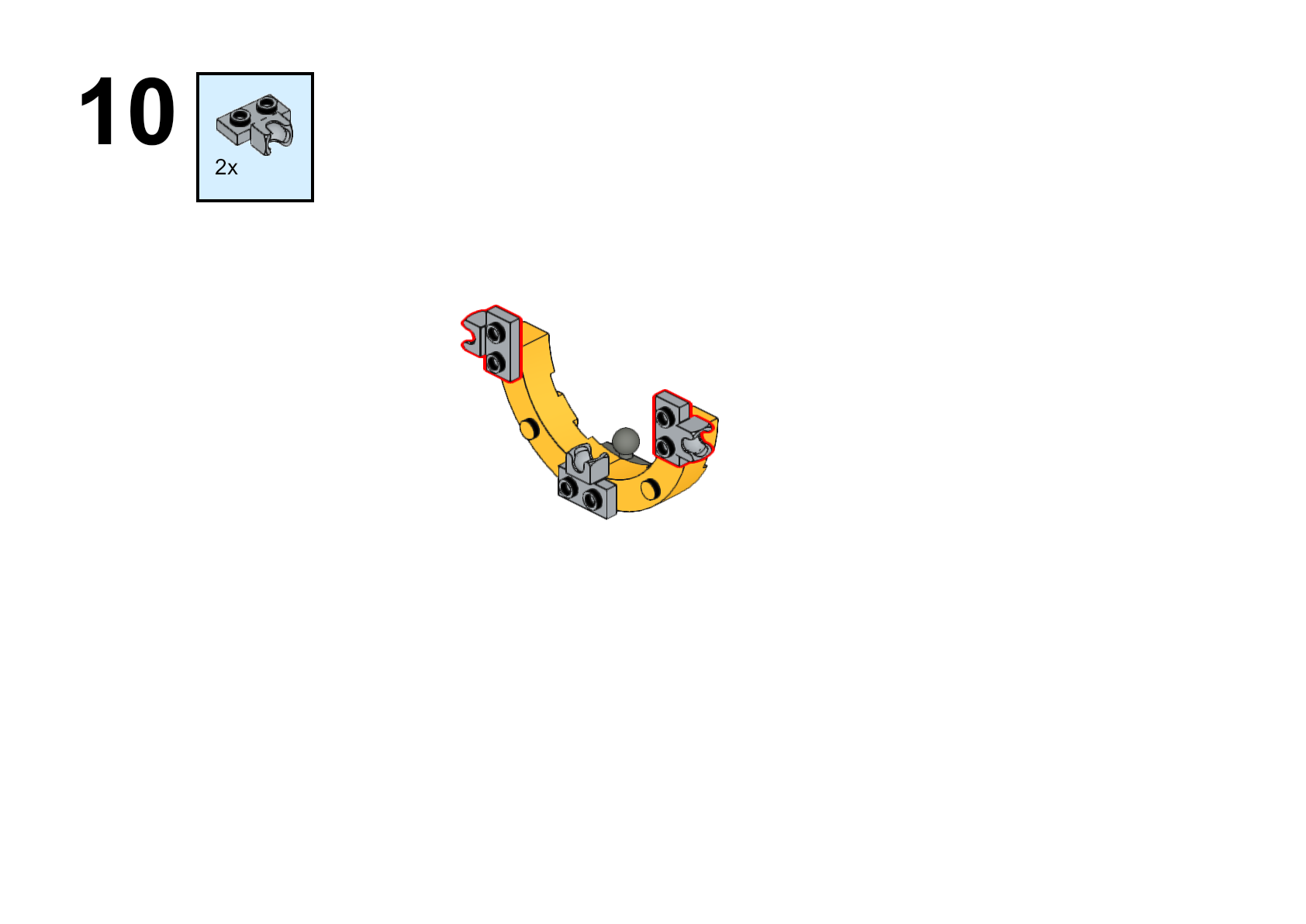
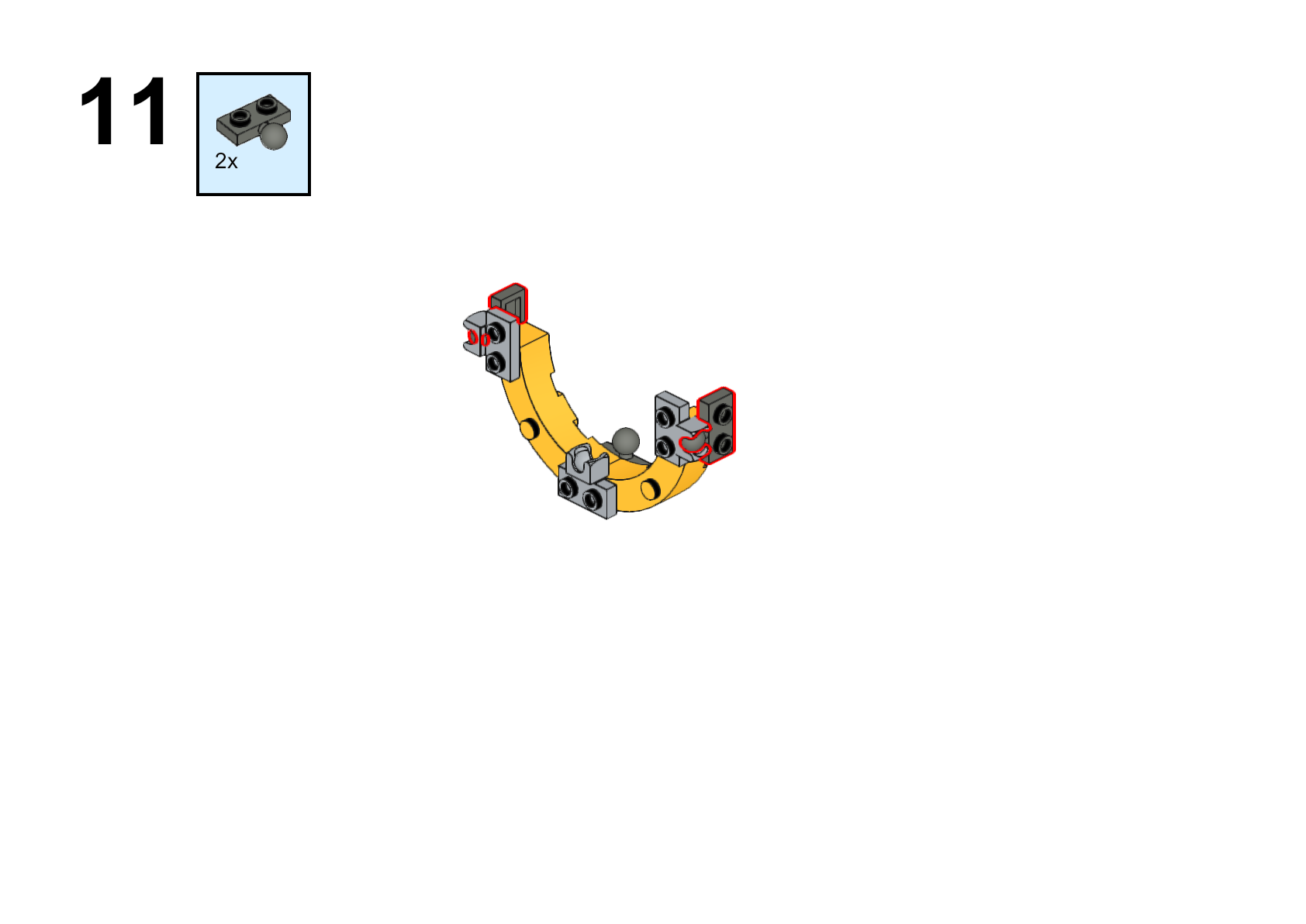
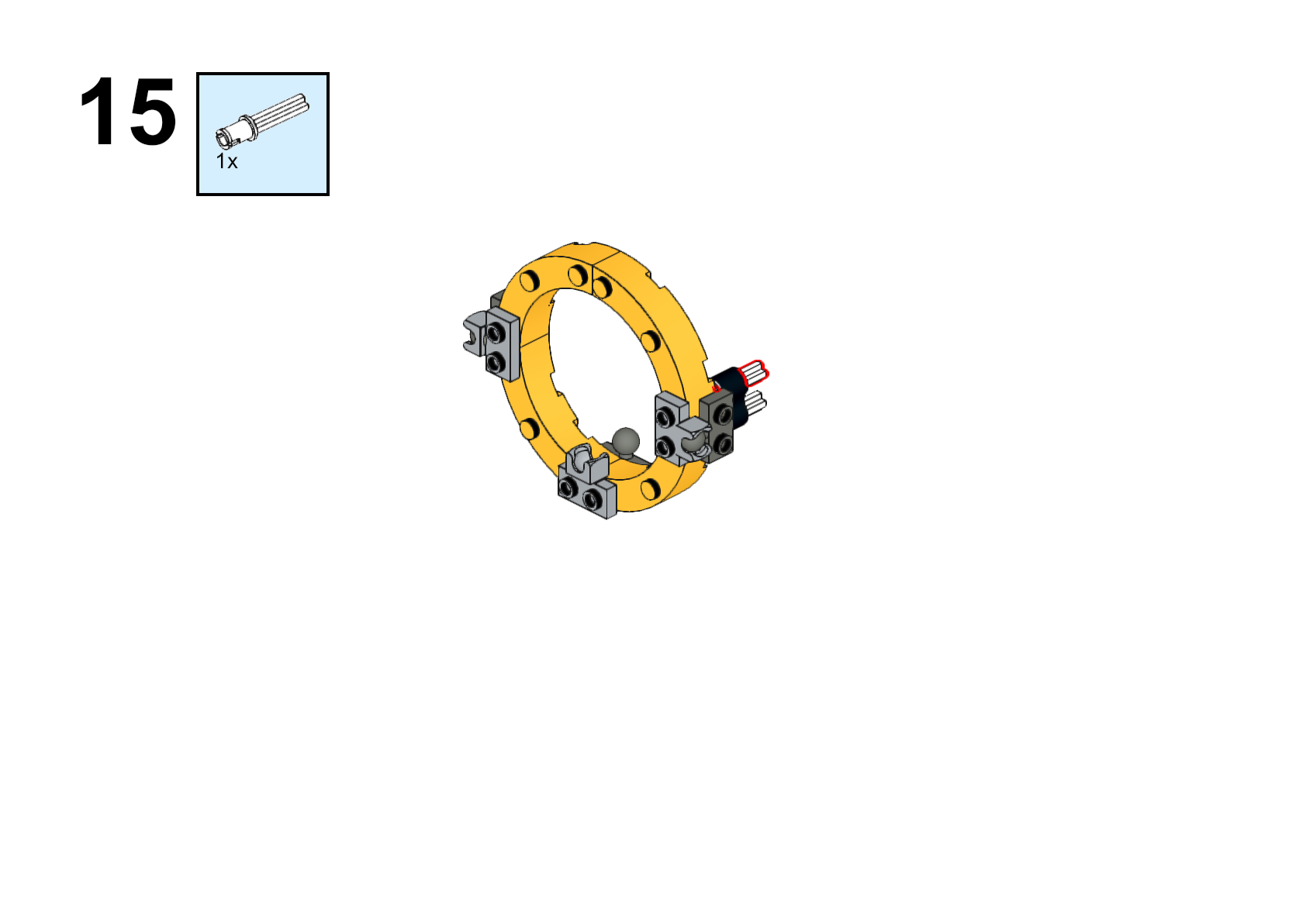
Pas a pas per fer un braçalet
El disseny del vostre braçalet, o qualsevol altra solució que vulgueu, és lliure, però, com a exemple, us deixem una guia pas a pas per poder muntar un braçalet com el de la imatge:
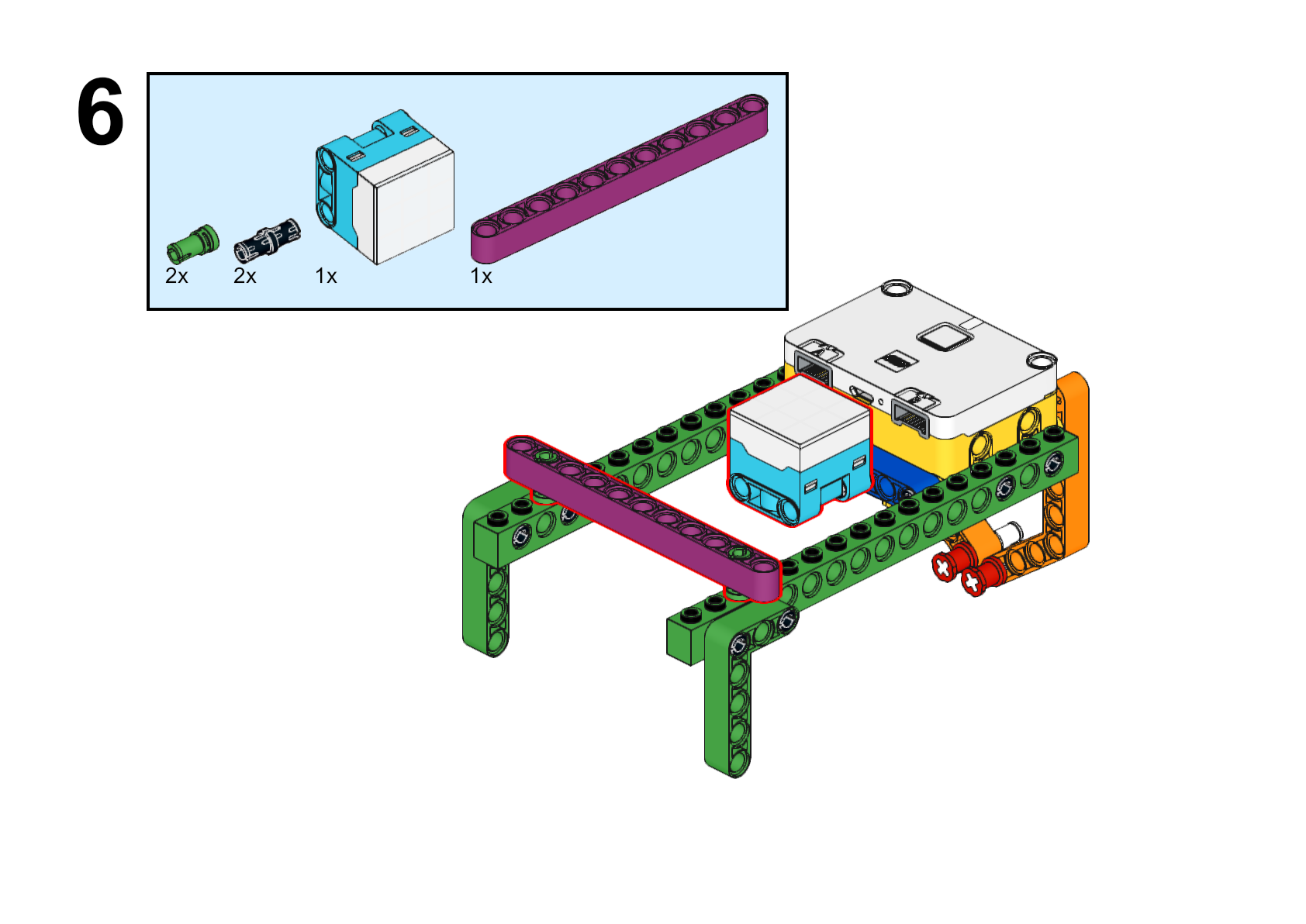
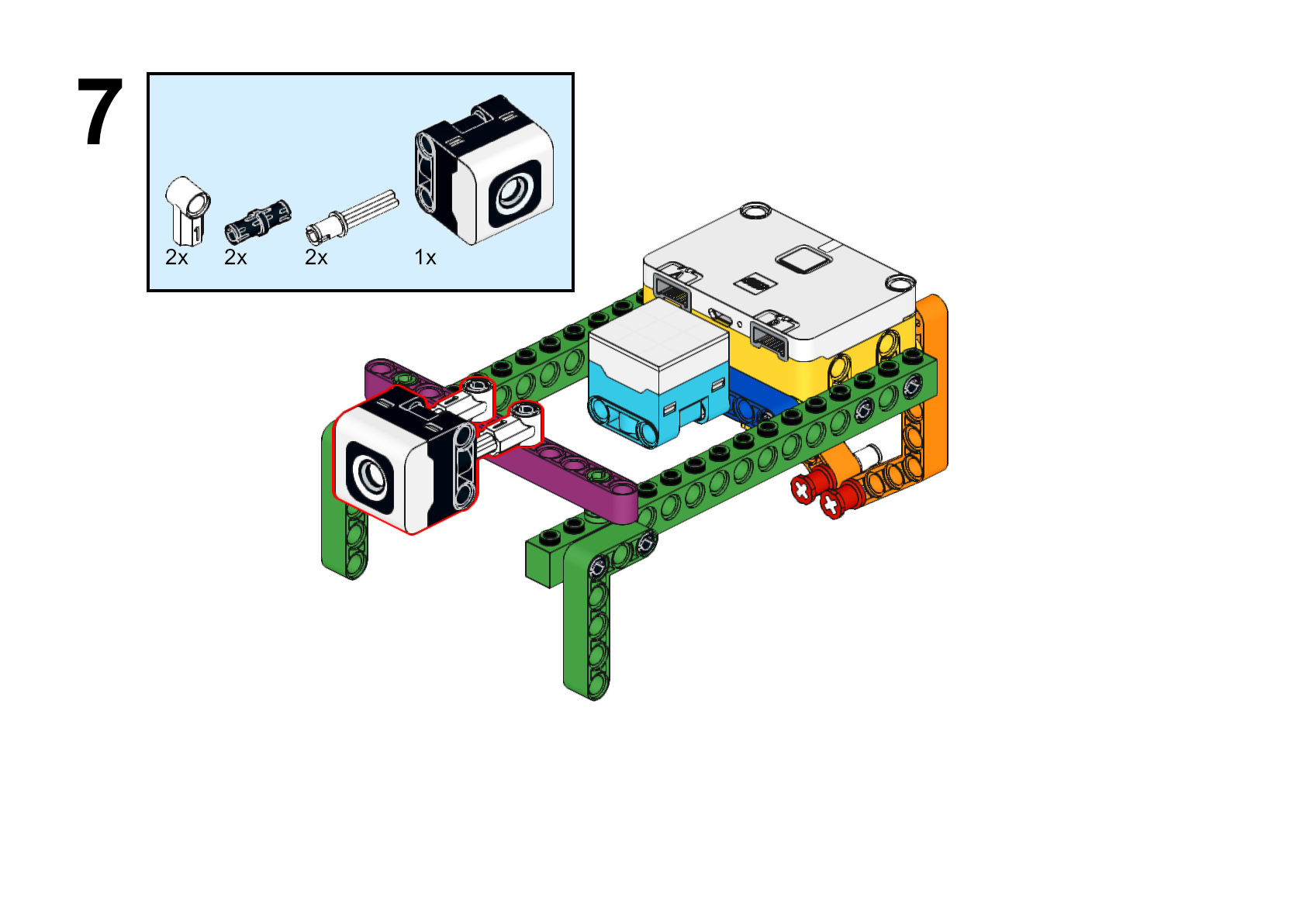
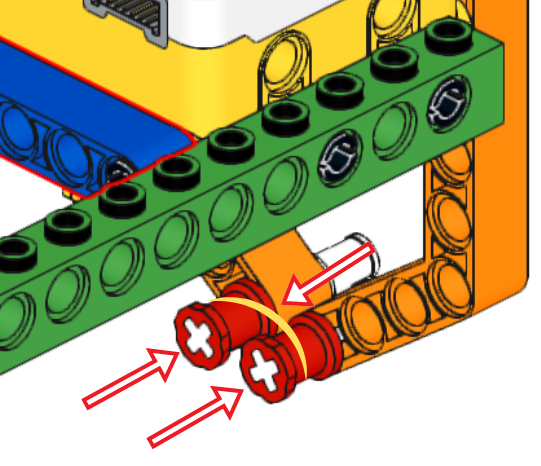
A sota del sensor de color hi col·locarem un anell per poder passar els dits i controlar millor cap a on apunta el sensor de color:
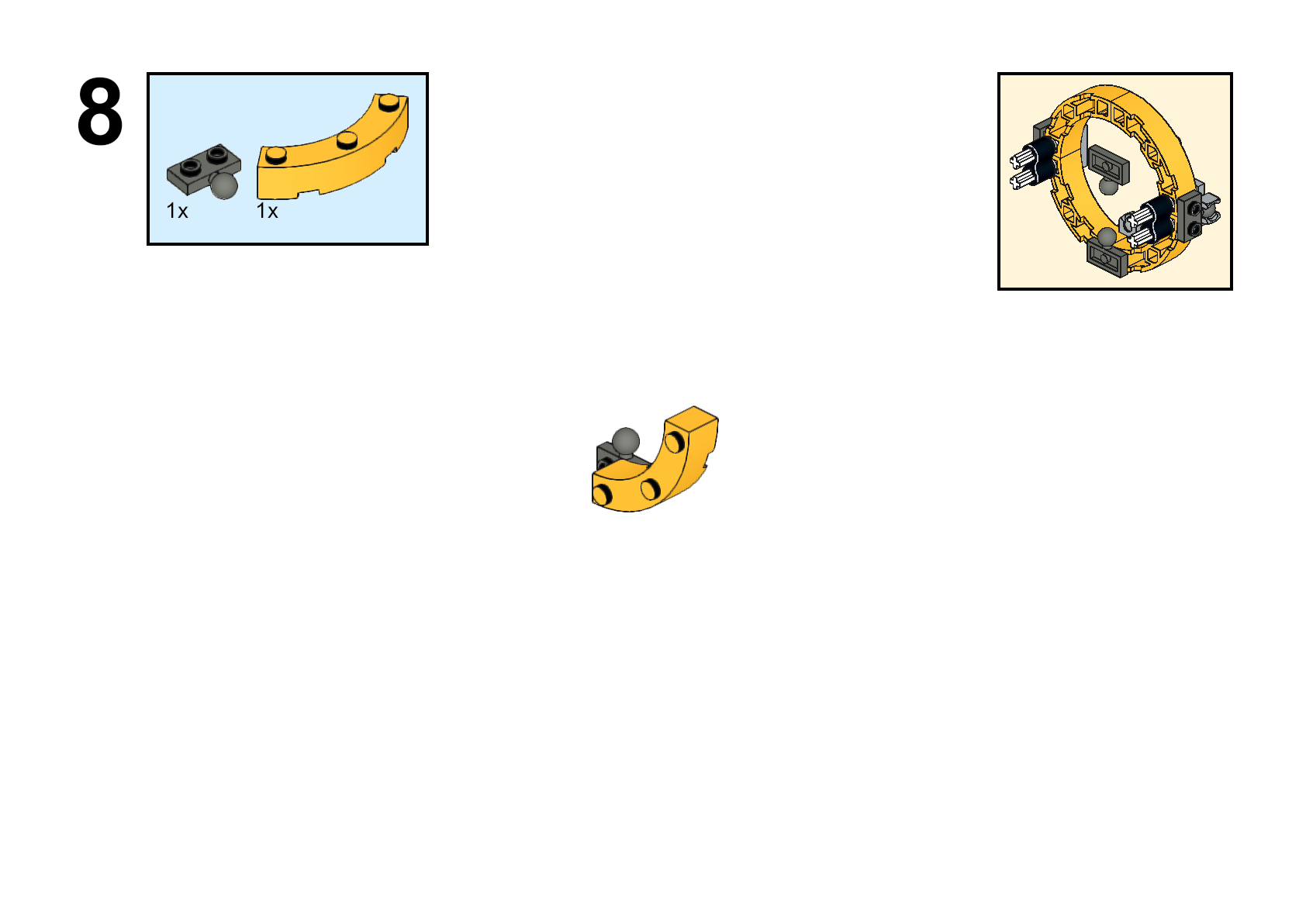
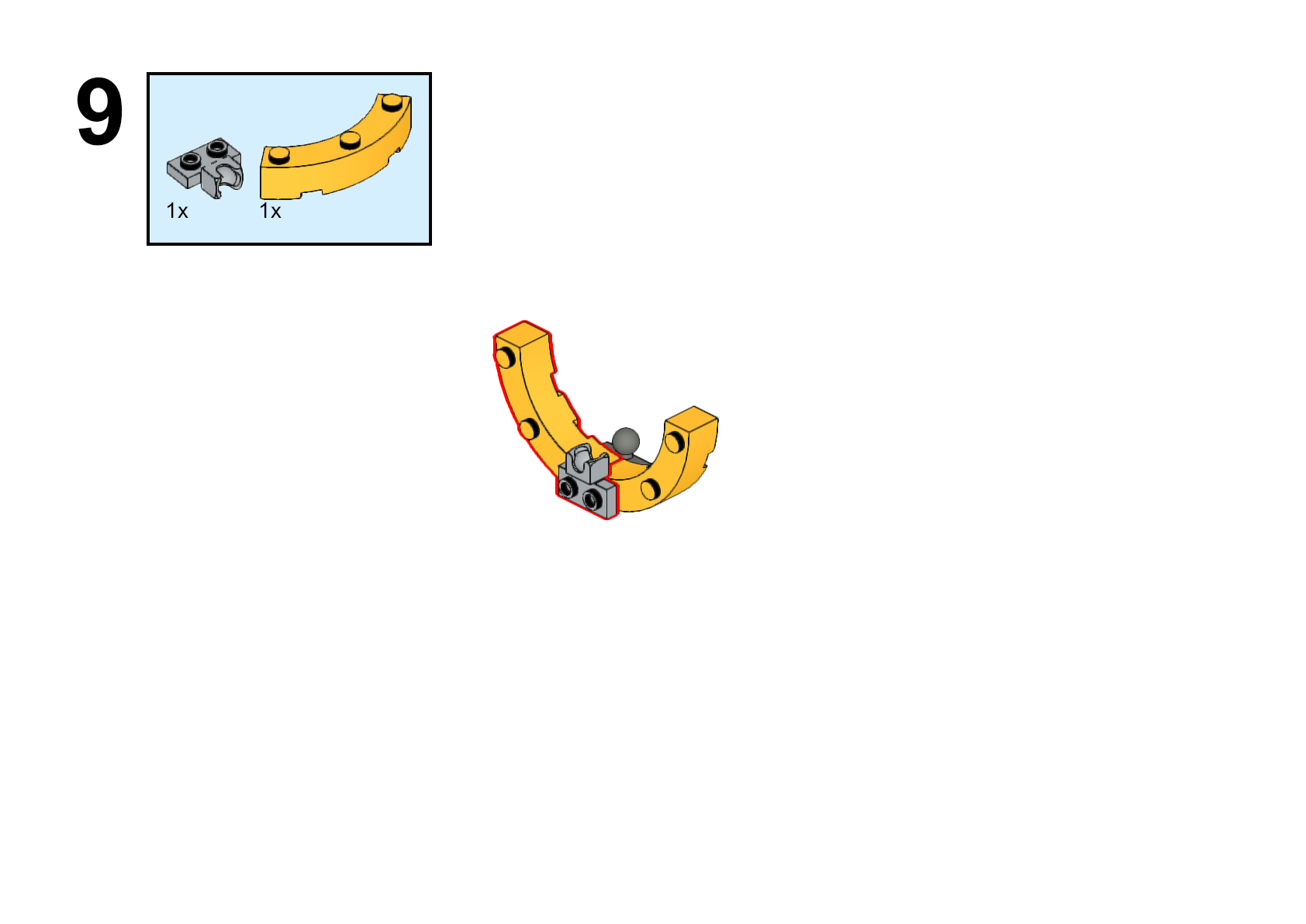
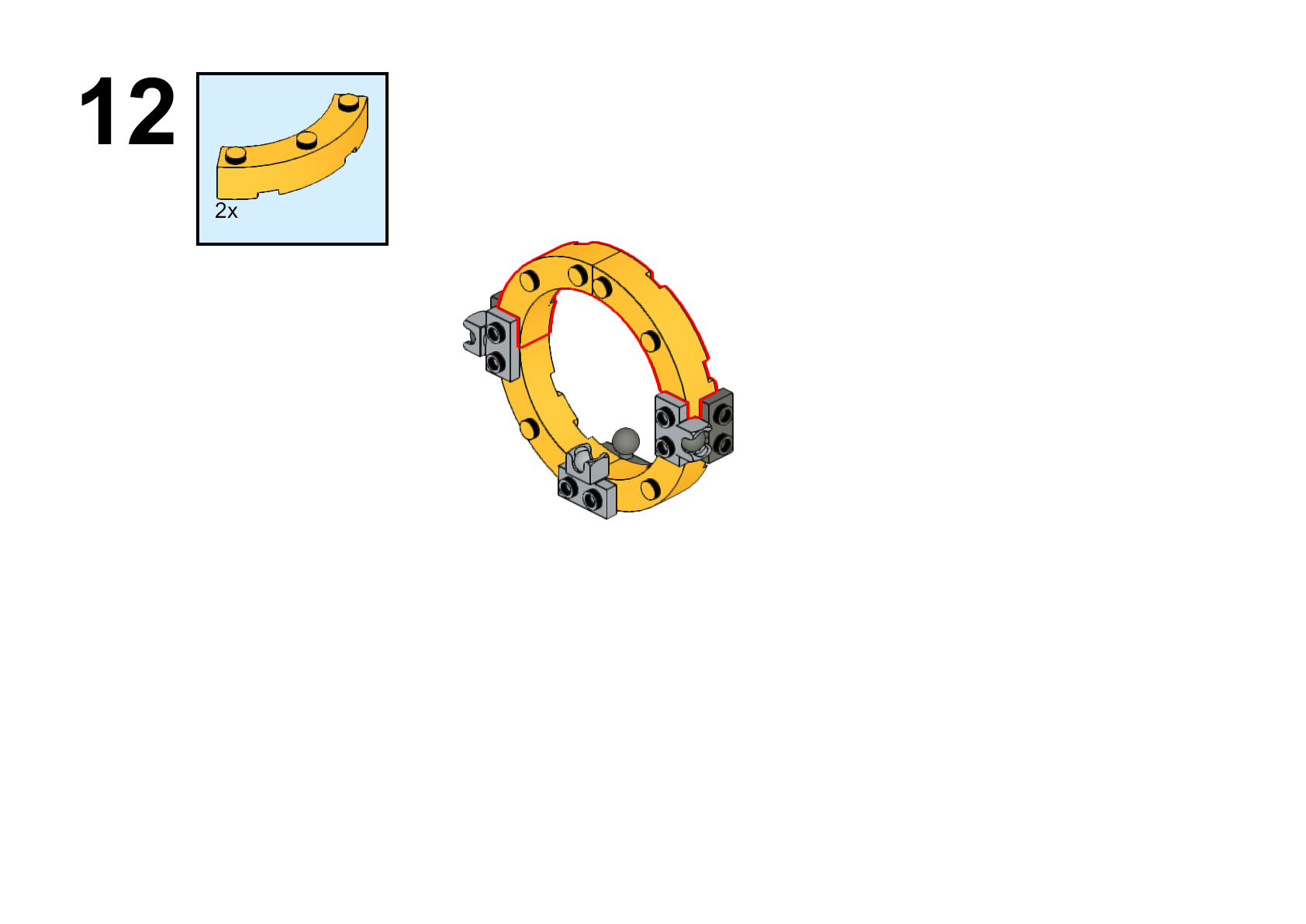

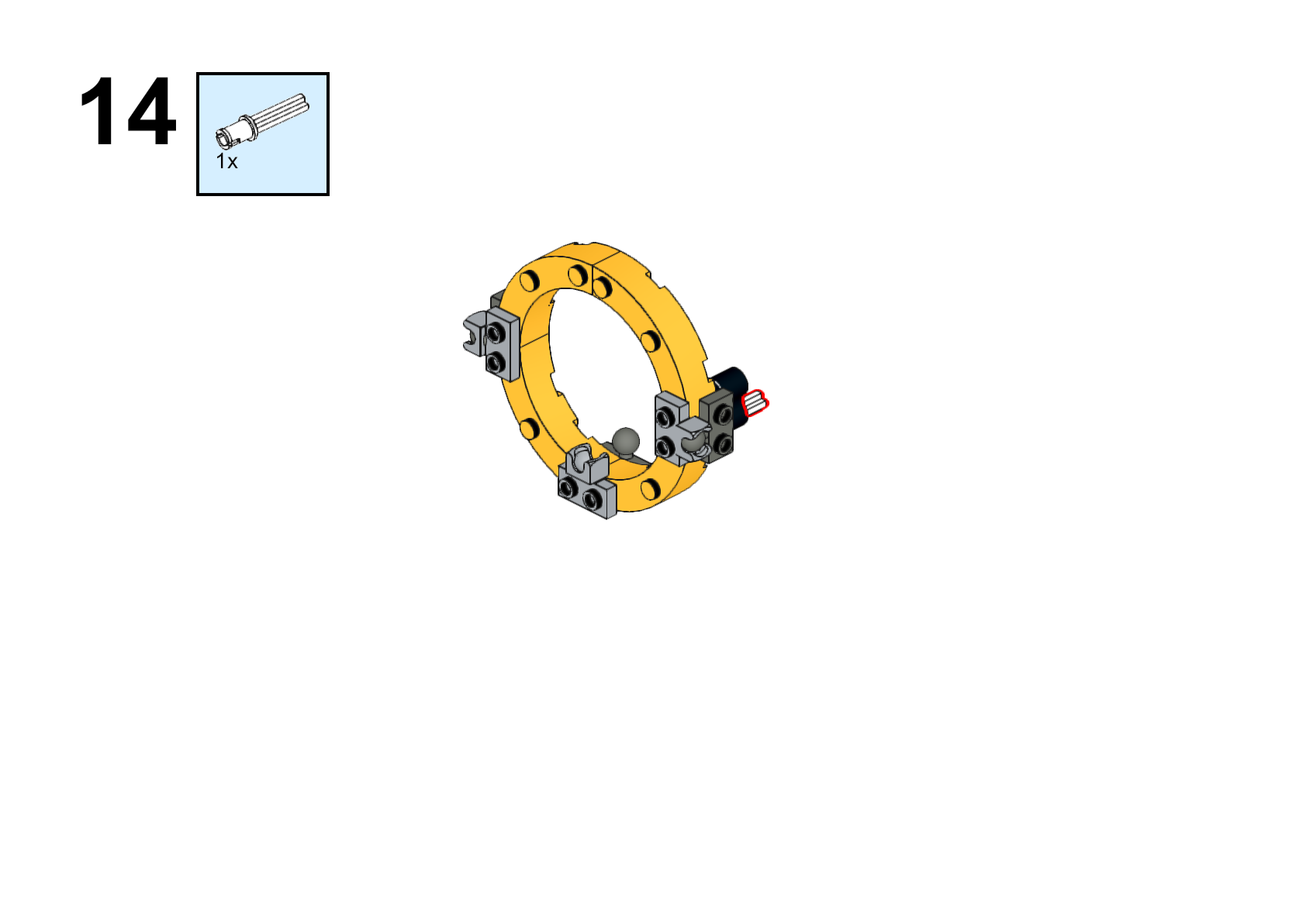

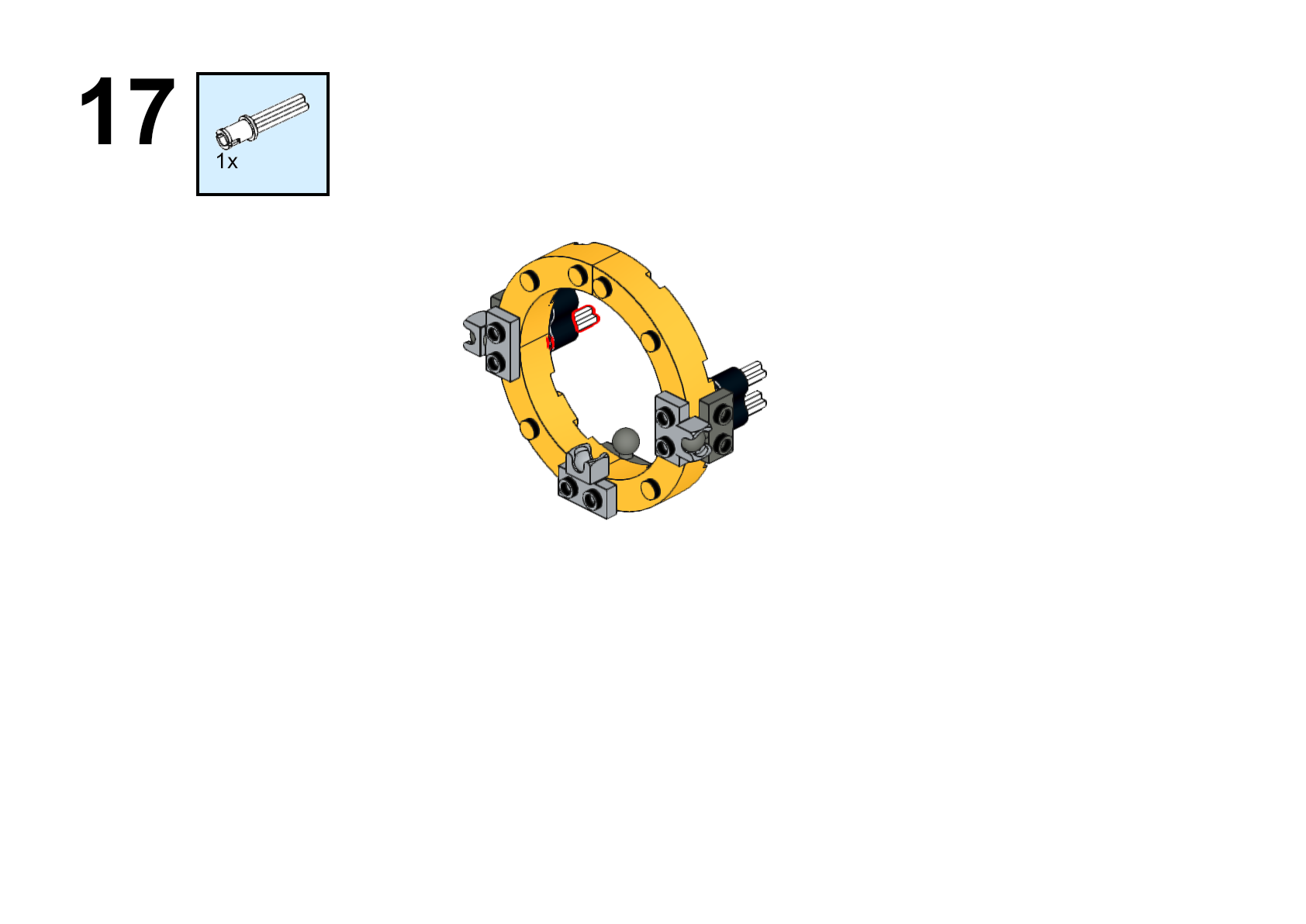
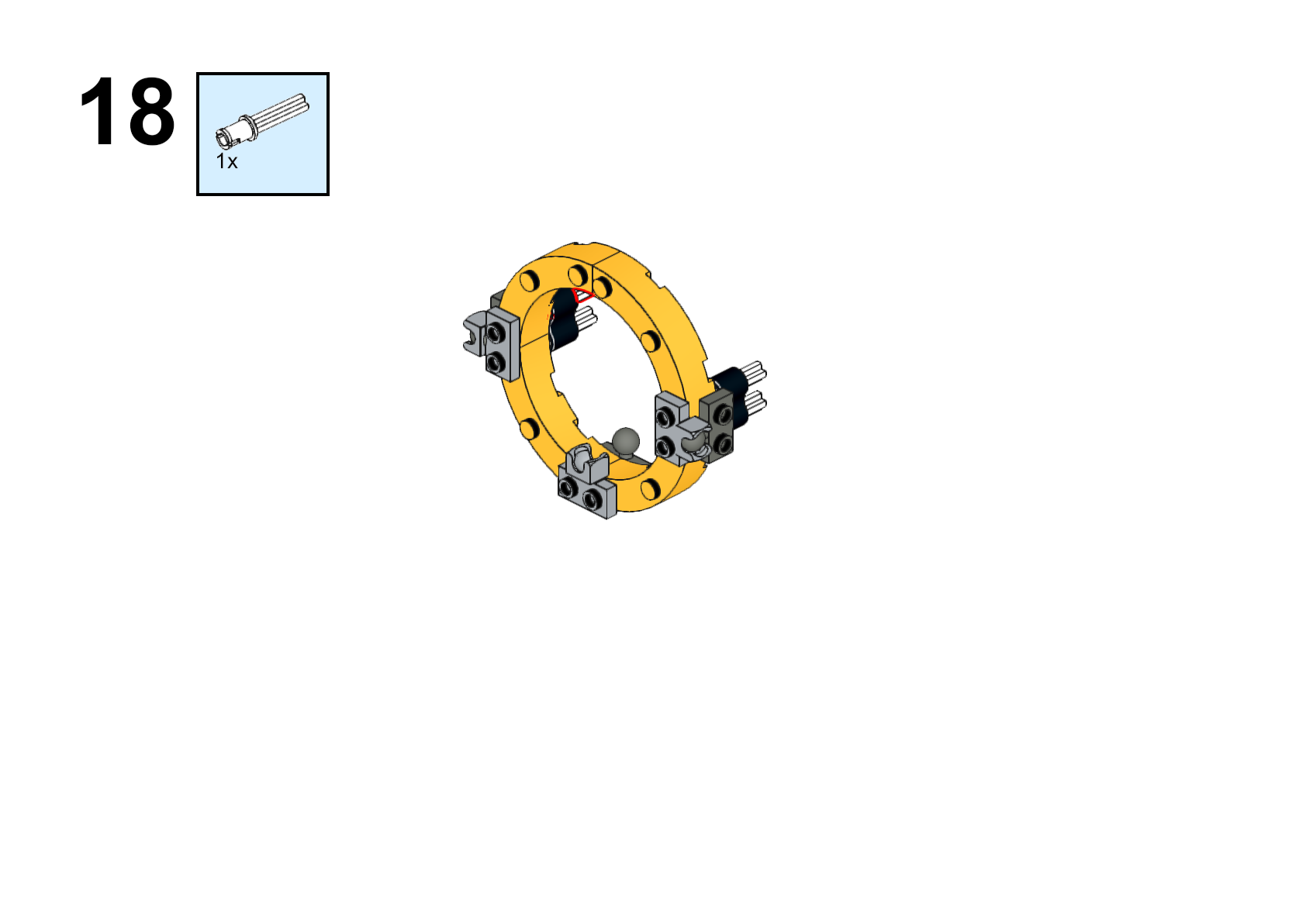

Per subjectar millor el braçalet al braç, utilitzeu una goma de color groc de les que porta el conjunt, unint els dos suports de color vermell:
Recordeu que aquest és un repte lliure i podeu fer altres construccions. Sigueu creatius!
Programació del braçalet
En aquesta ocasió, el repte és que el dispositiu que heu construït sigui capaç d’ajudar-vos a seguir una línia negra pintada sobre una paret blanca (també ho podeu fer sobre una línia negra pintada a terra, però si feu un dispositiu tipus braçalet us serà més còmode fer-ho sobre una paret).
El funcionament pot ser, per exemple, que la matriu de leds s’il·lumini de color vermell mentre el sensor detecti color blanc i canviï a verd quan detecti color negre. Podeu afegir-hi sons, fer configuracions de llums amb els leds de la matriu… feu volar la vostra imaginació!
⚠️ Consells per treballar amb el sensor de color per detectar la línia negra:
Com hem esmentat a l’inici, utilitzarem una propietat que té el sensor de color de LEGO de mesurar el reflex de llum que fa la superfície que hi ha sota el sensor. En general, fer-ho així us donarà menys problemes que intentar diferenciar directament entre color blanc i negre.
Per poder treballar correctament amb aquest bloc caldrà que feu els passos que us descrivim a continuació.
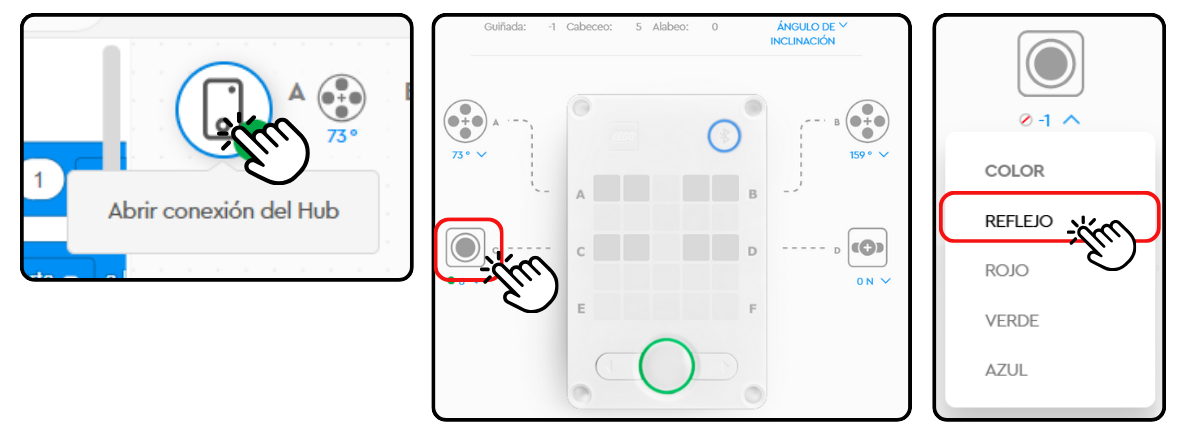
1. Un cop teniu connectat el sensor de color al hub, feu el següent:
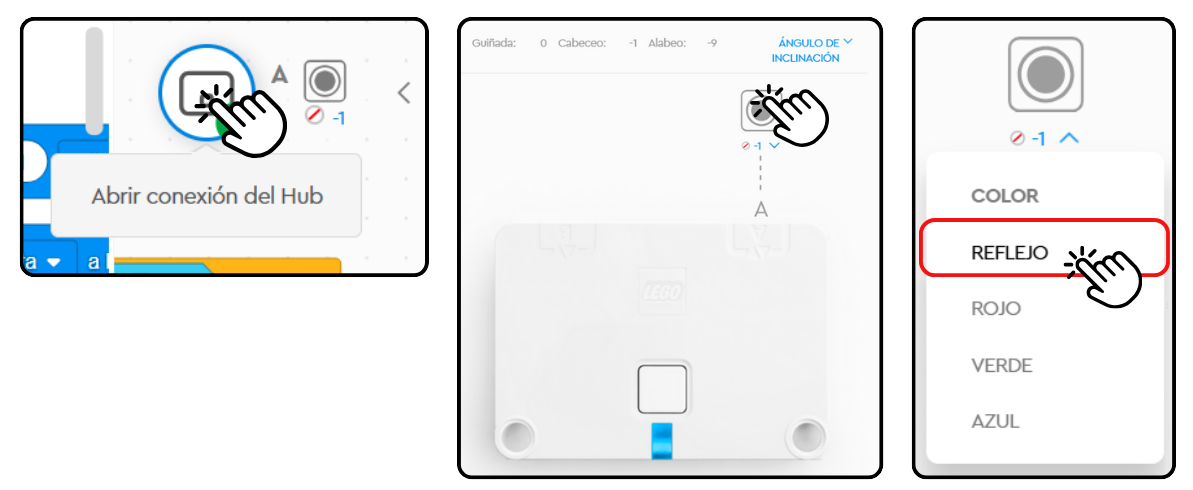
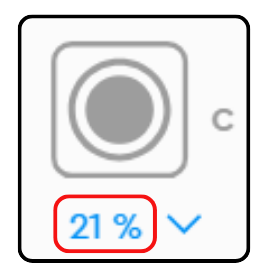
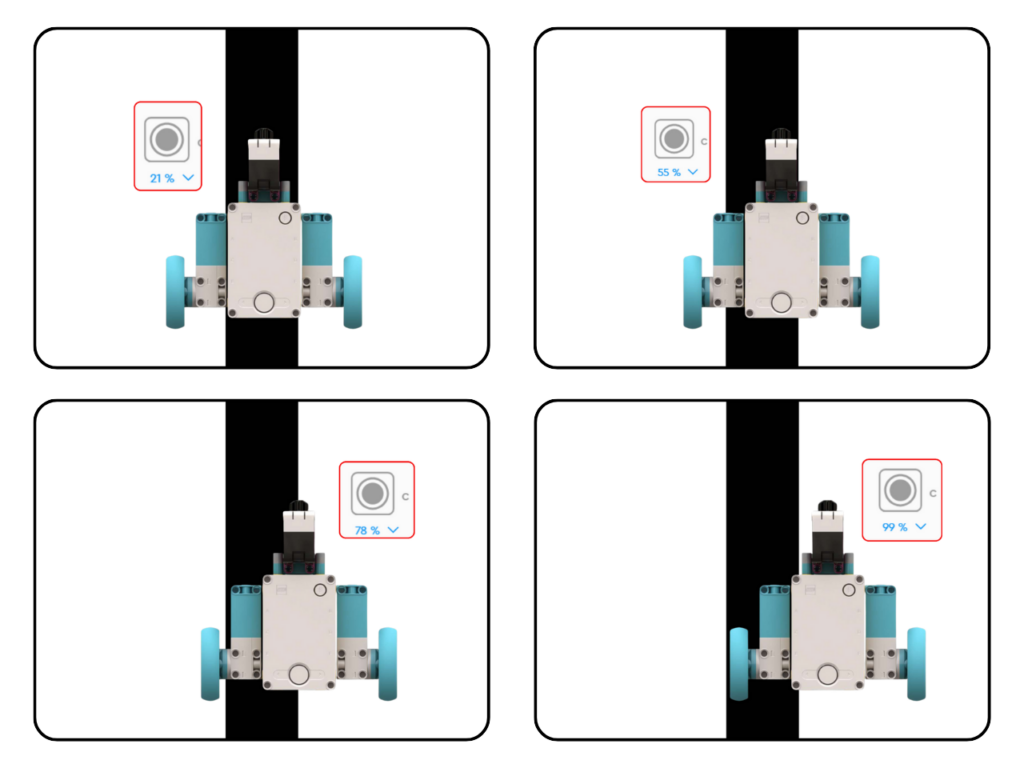
2. Un cop fet, veureu que sota el símbol del sensor de color apareix una xifra amb un percentatge:
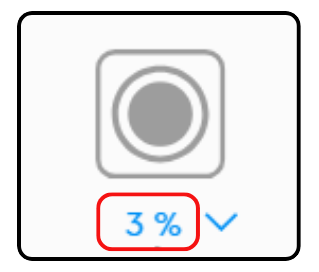
Aquest percentatge és la quantitat de llum reflectida que rep el sensor. Per poder configurar correctament el funcionament del dispositiu, en les mateixes condicions d’il·luminació on fareu el repte, mireu quins valors s’obté en situar-lo sobre la superfície blanca i quins valors s’obté en situar-lo sobre la línia negra:
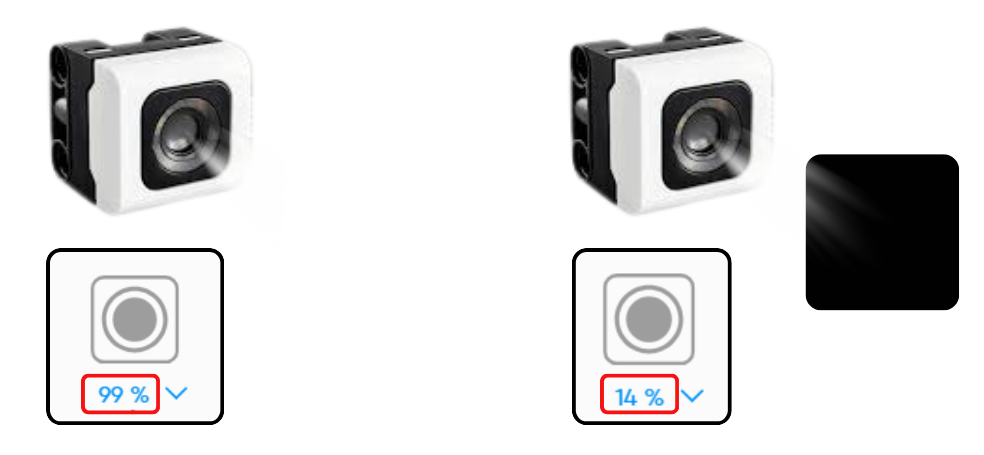
Acosteu i allunyeu una mica el sensor de la línia negra per veure quin és el percentatge màxim que obteniu sobre el negre, ja que quan utilitzeu el sensor sobre la paret no sempre el tindreu exactament a la mateixa distància. De totes maneres, tingueu en compte que caldrà que el sensor estigui a prop de la línia negra (a una distància d’un centímetre, aproximadament). A l’exemple, el valor màxim que hem obtingut és del 26% quan el sensor està a uns 2 cm de la línia negra, si estem més a prop, el valor és més baix i quan ens allunyem una mica comença a baixar de nou. Aquest valor màxim del reflex (l’anomenarem Vmax) serà, doncs, el que utilitzareu a l’hora de programar per diferenciar entre blanc i negre.
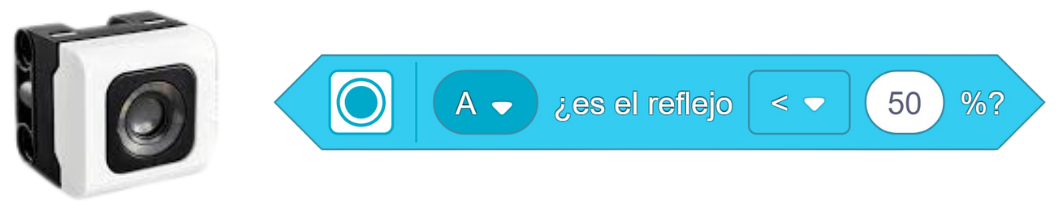
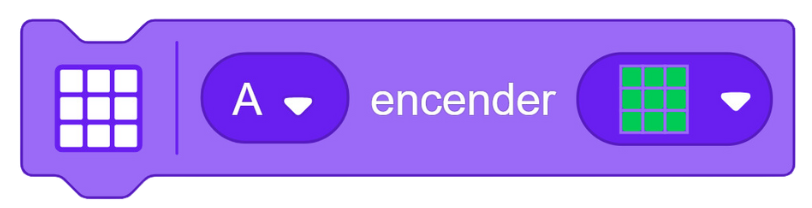
Feu que, en detectar una reflexió menor al valor Vmax que heu obtingut, la matriu de leds es posi de color verd:

Quan el valor sigui més gran que Vmax, feu que la matriu de leds es posi de color vermell:

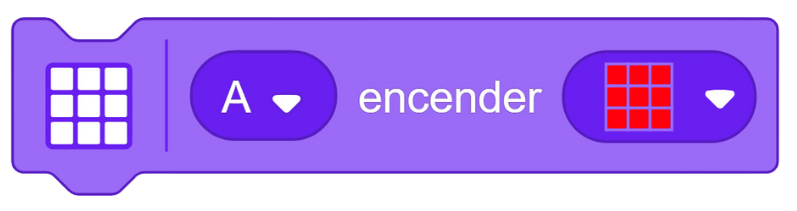
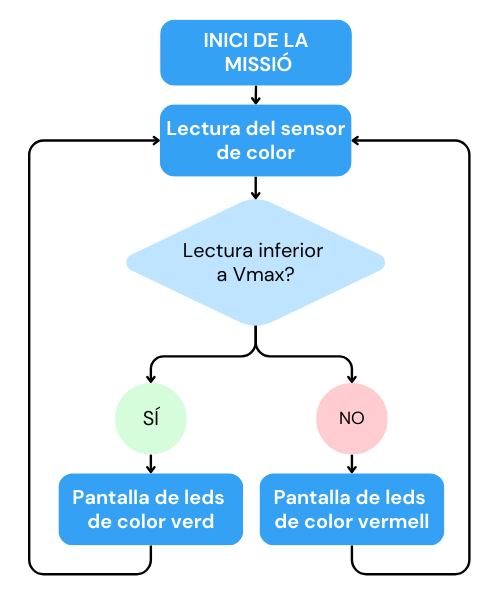
Diagrama de flux
Blocs recomanats
A continuació, us donem algunes idees sobre els blocs de Spike LEGO Education que podeu d’utilitzar:
👉🏾 Esdeveniments (per començar):
👉🏾 Control (Condicional):
👉🏾 Sensor de color (opció reflex):
👉🏾 Llum (matriu de leds):

El sensor de color
En aquesta ocasió, el repte consisteix a dissenyar un vehicle que sigui capaç de travessar un laberint, o bé seguint un camí fet amb una línia negra o bé a partir de distàncies, i polsar un botó al final del recorregut. Com que no teniu un sensor d’infraroigs, si escolliu la primera opció, utilitzareu el sensor de color.

Què necessiteu?
✅ Conjunt LEGO SPIKE Prime (hub, peces de construcció, sensor de color, sensor de força i dos motors).
✅ Cinta adhesiva de color negre.
🔸 Preparació de la missió
Ja sabeu que en aquest repte us demanem que construïu un vehicle que sigui capaç de travessar un laberint. Una opció és que pugui seguir una línia negra dibuixada sobre una superfície blanca a terra (utilitzant el sensor de color) i que simuli que prem un polsador quan arriba al final del recorregut (utilitzant el sensor de força). També podreu optar per resoldre el repte movent el robot una distància determinada.
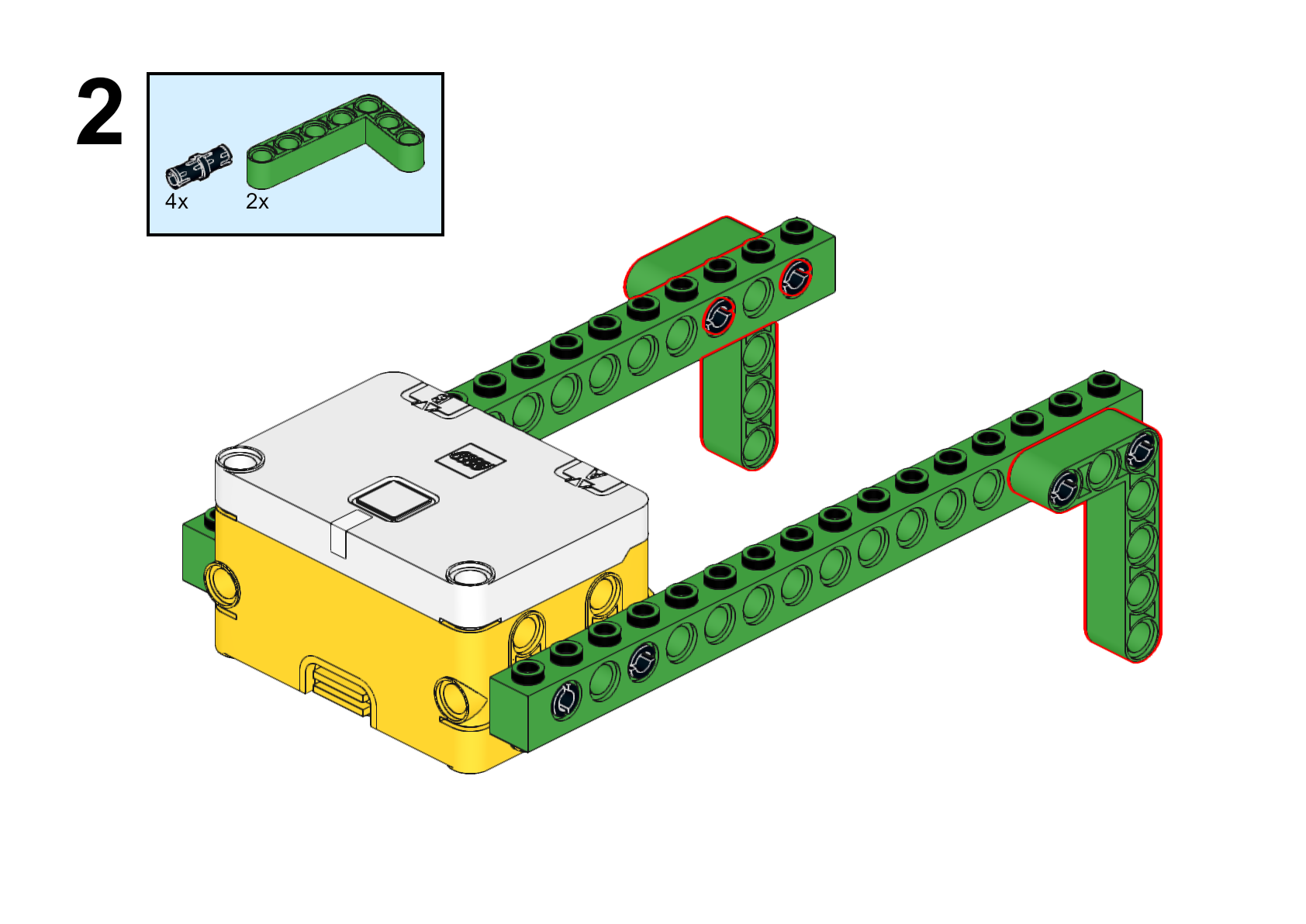
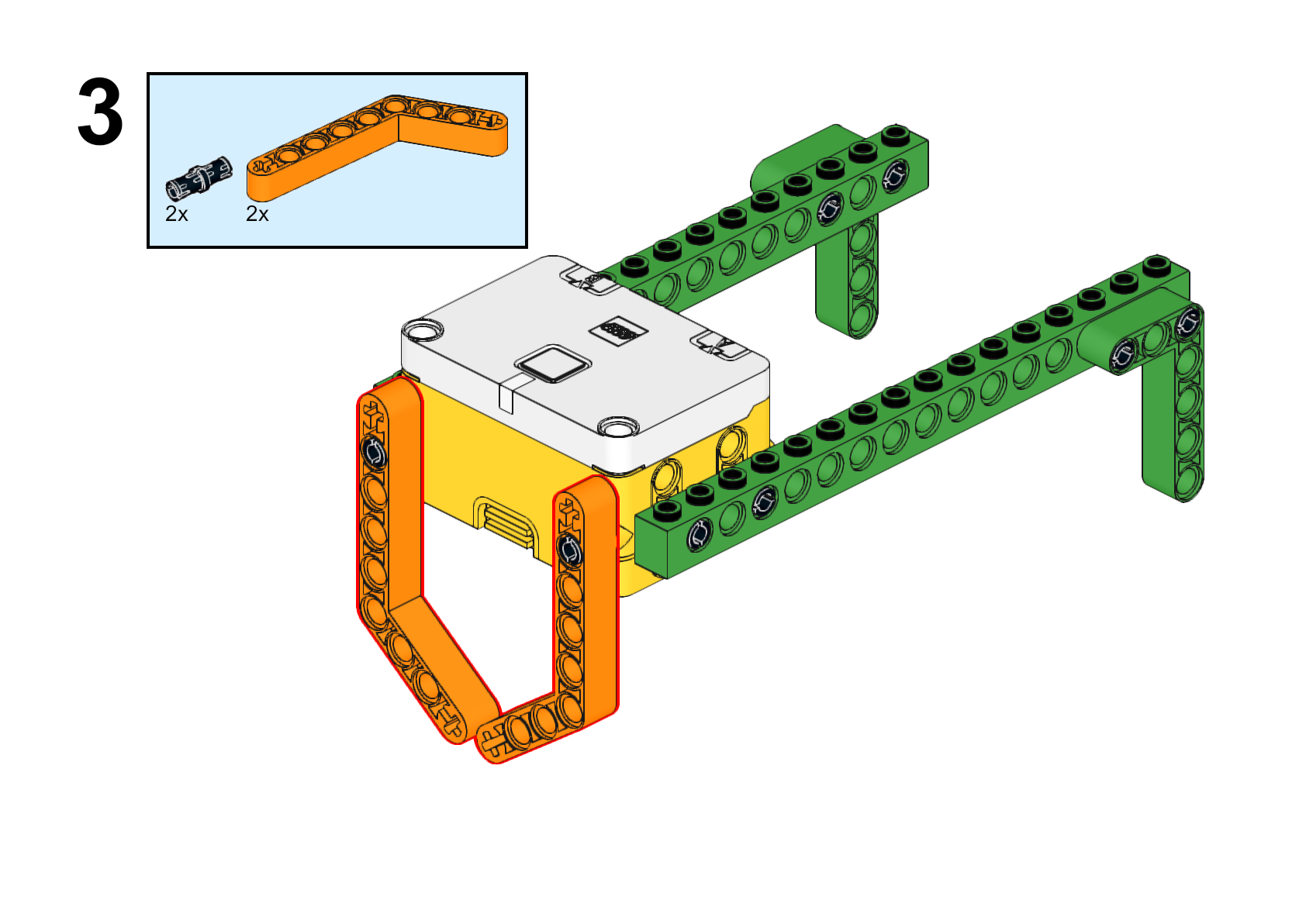
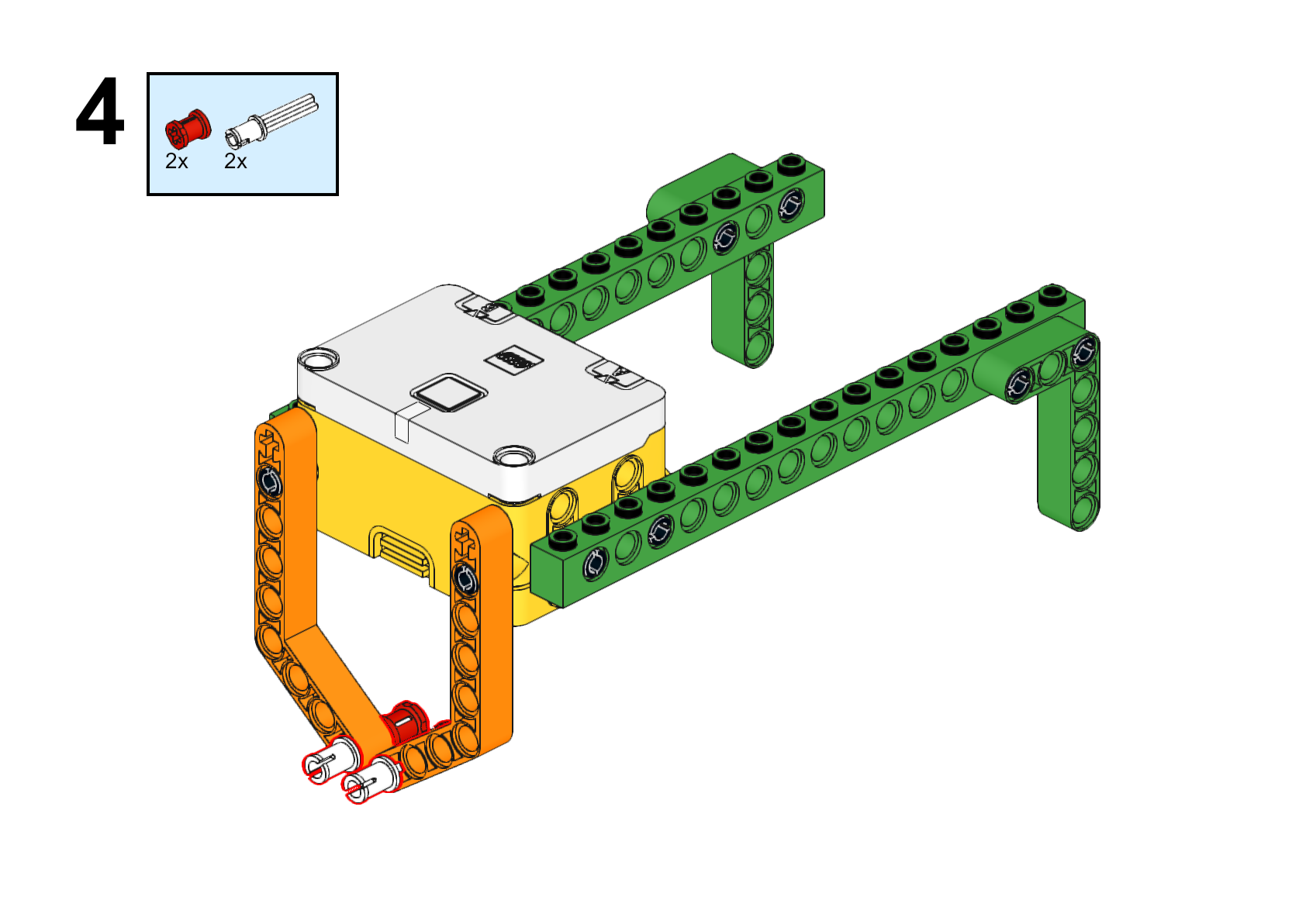
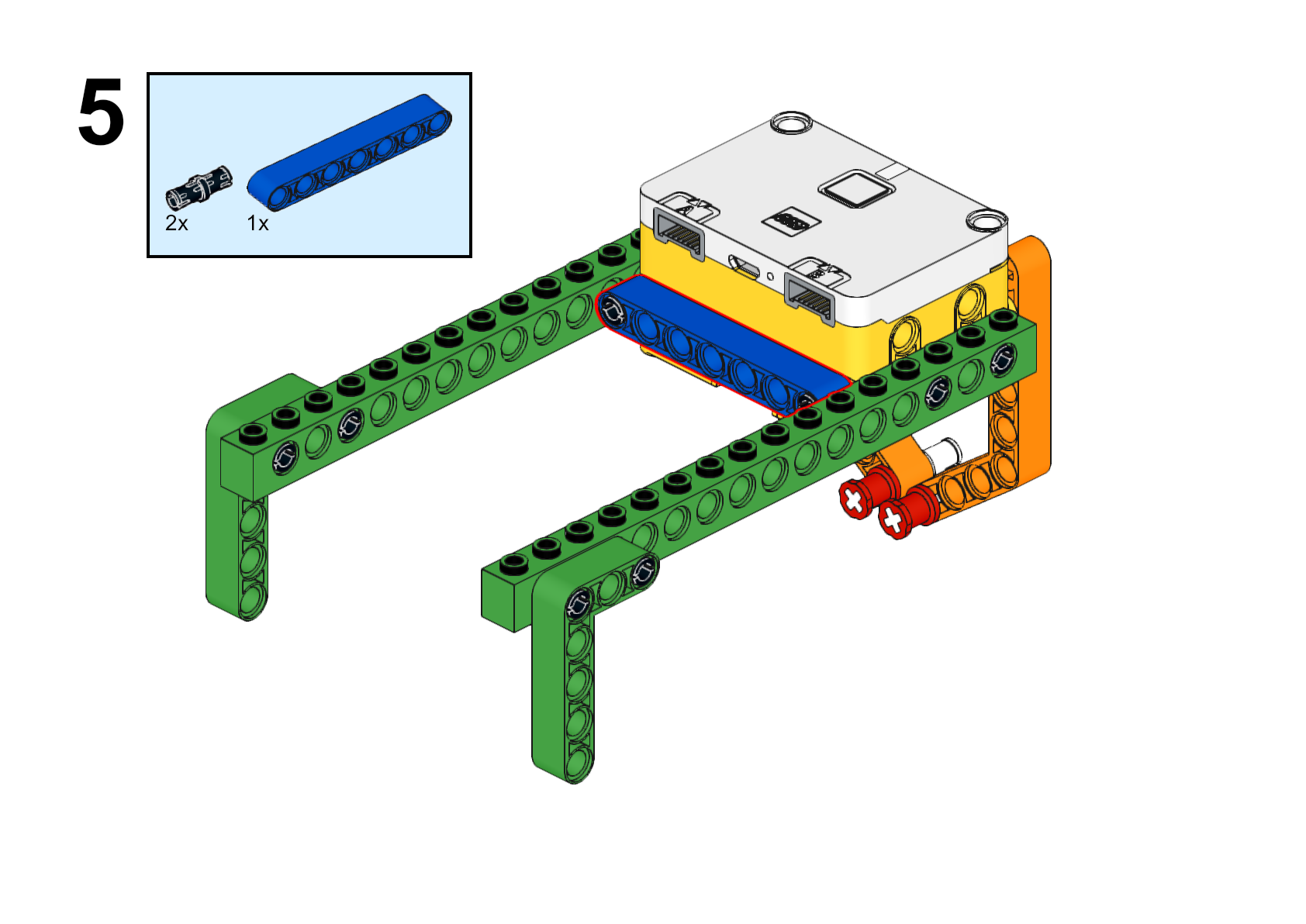
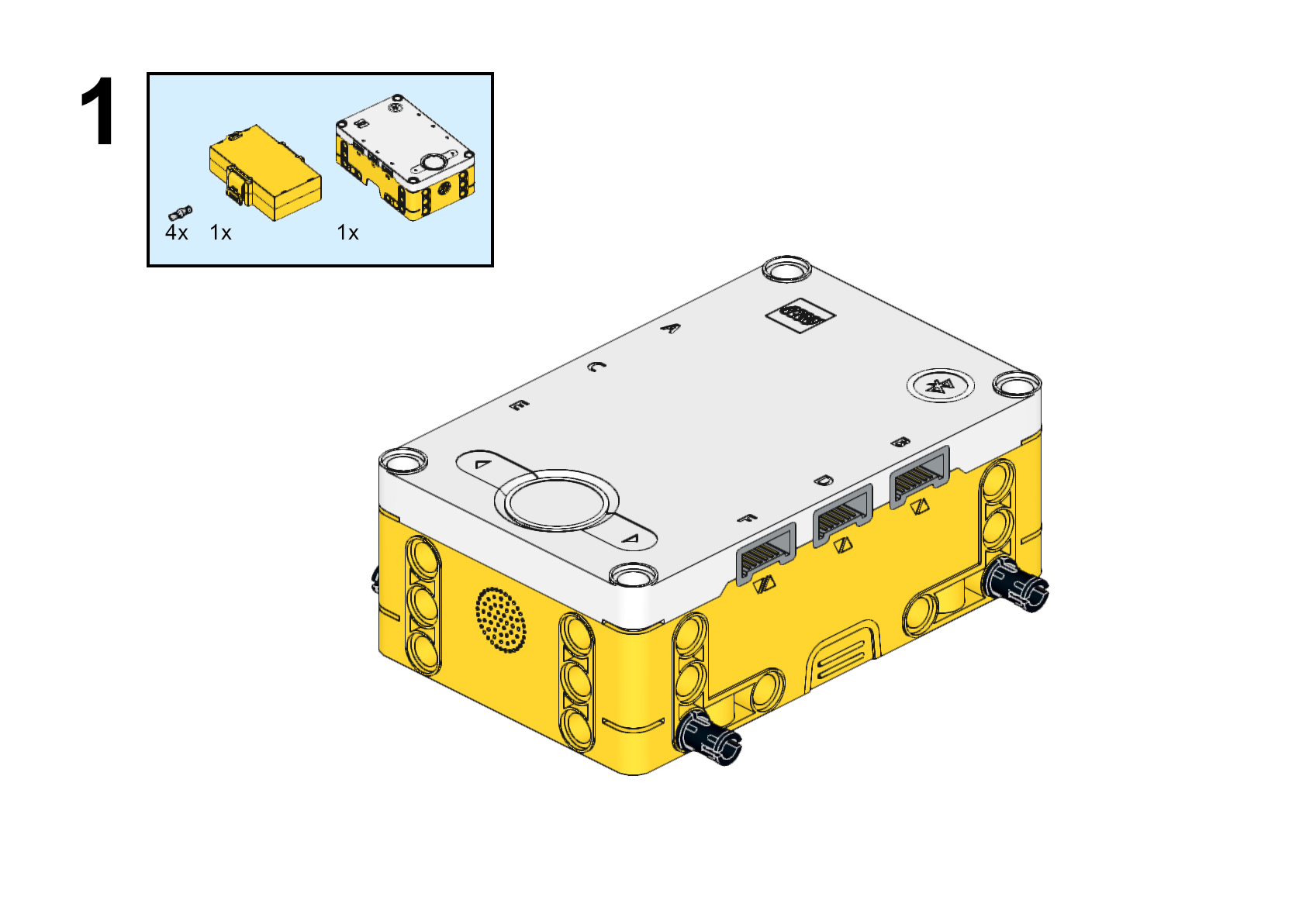
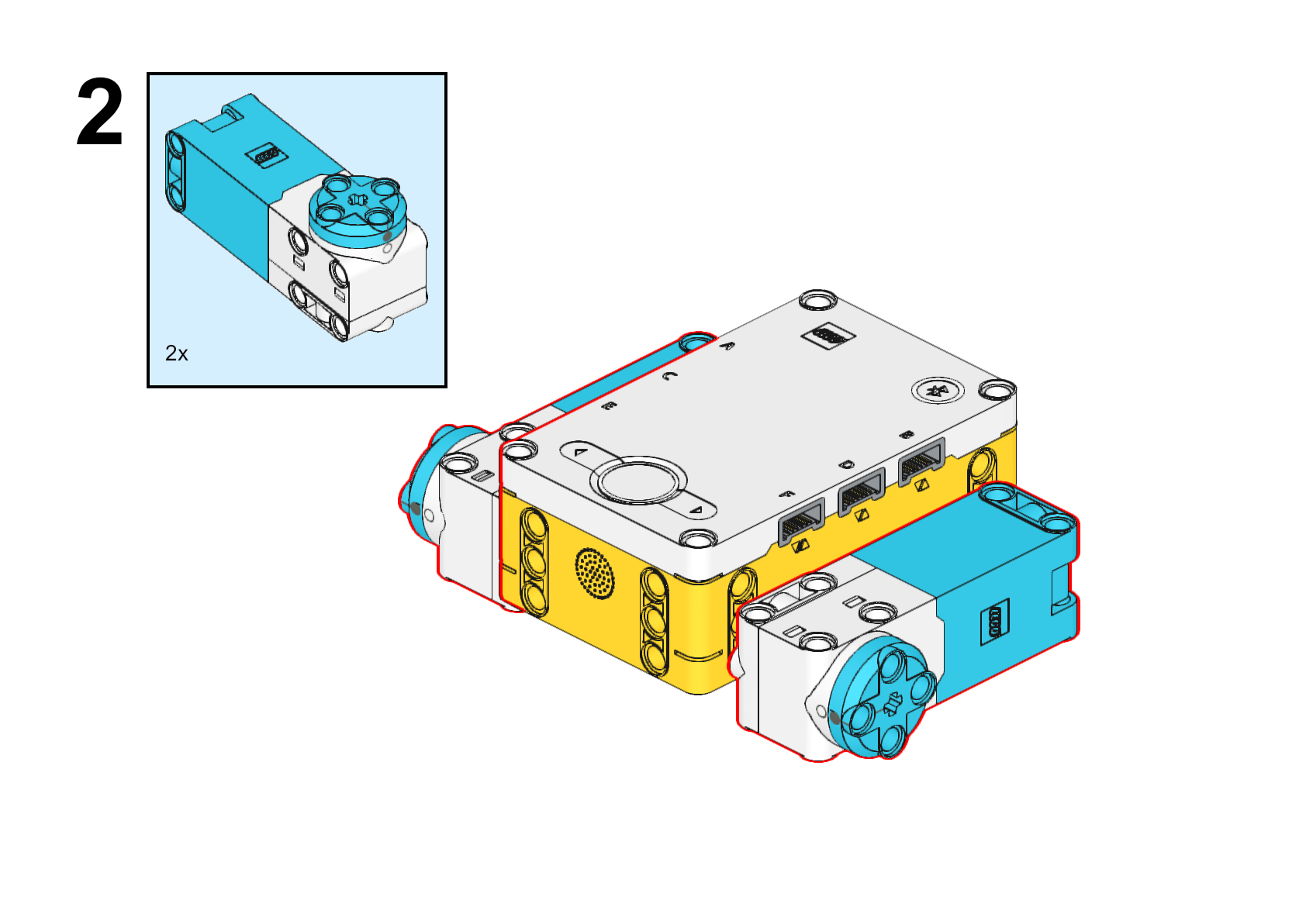
Pas a pas per fer un vehicle
El disseny del vostre vehicle és lliure, però com a exemple, us deixem un exemple amb la construcció guiada pas a pas d’un vehicle senzill com el de la imatge.
Si feu la segona opció (programació per distàncies), no caldrà que feu els passos 4, 5 i 6.
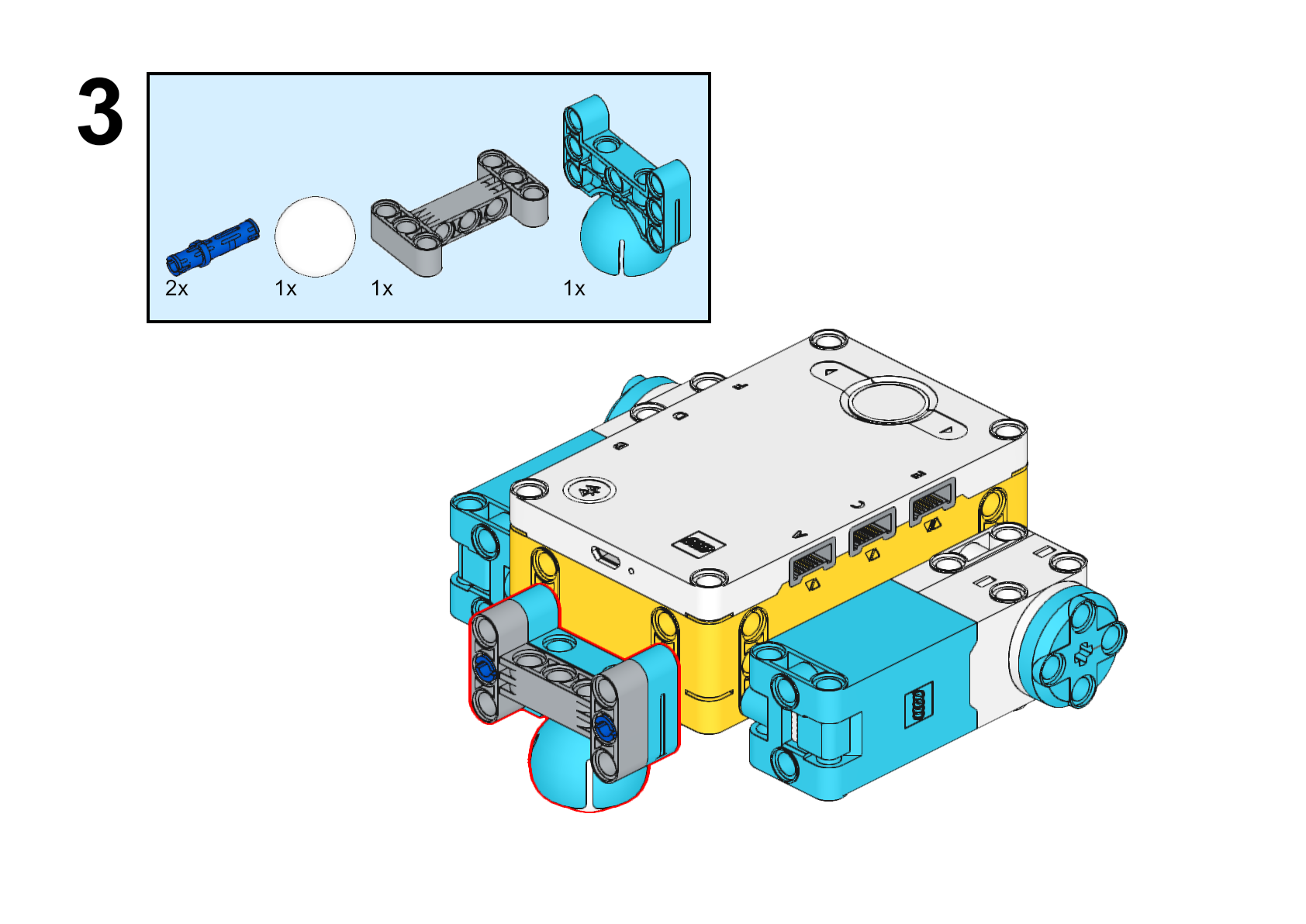
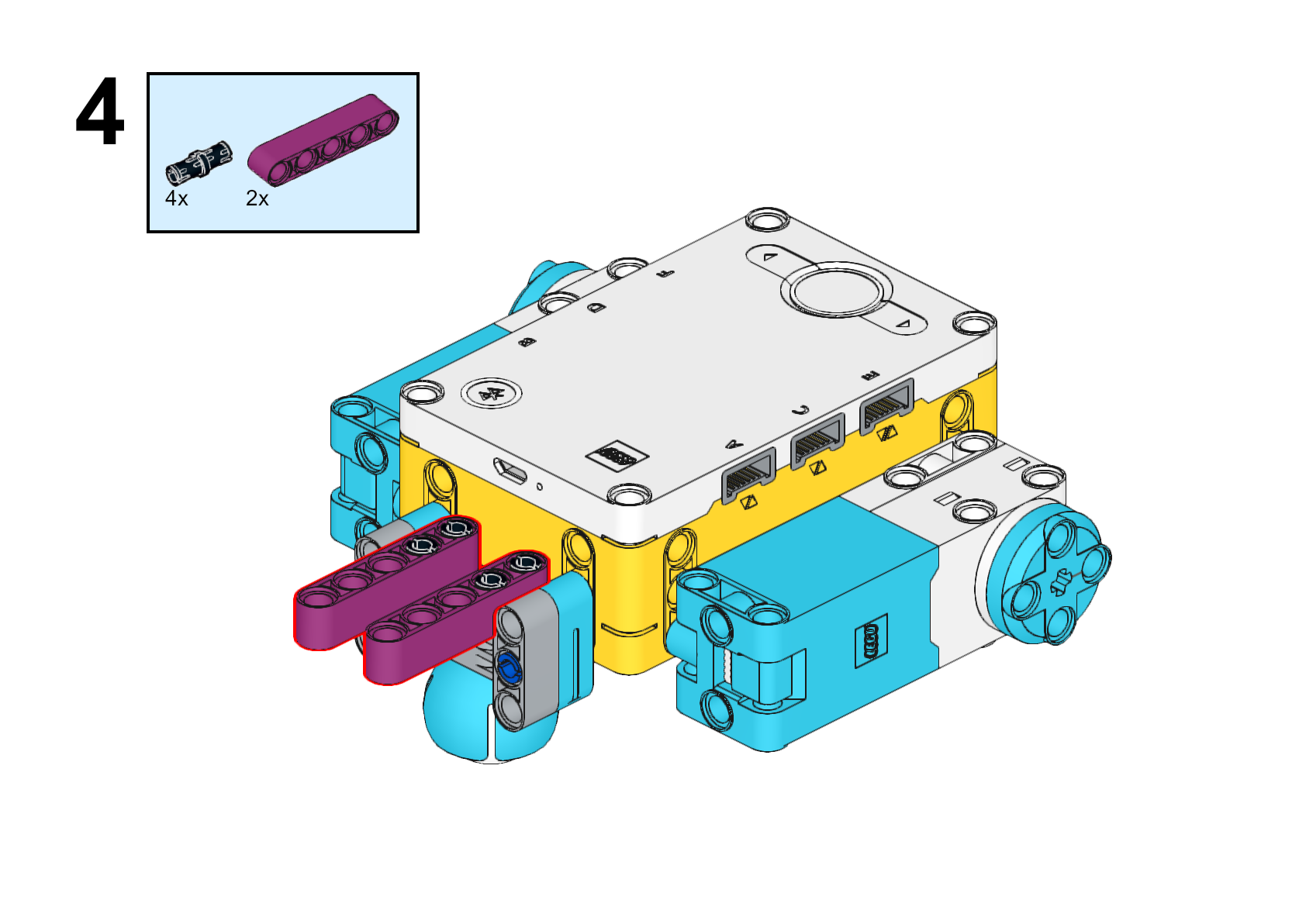


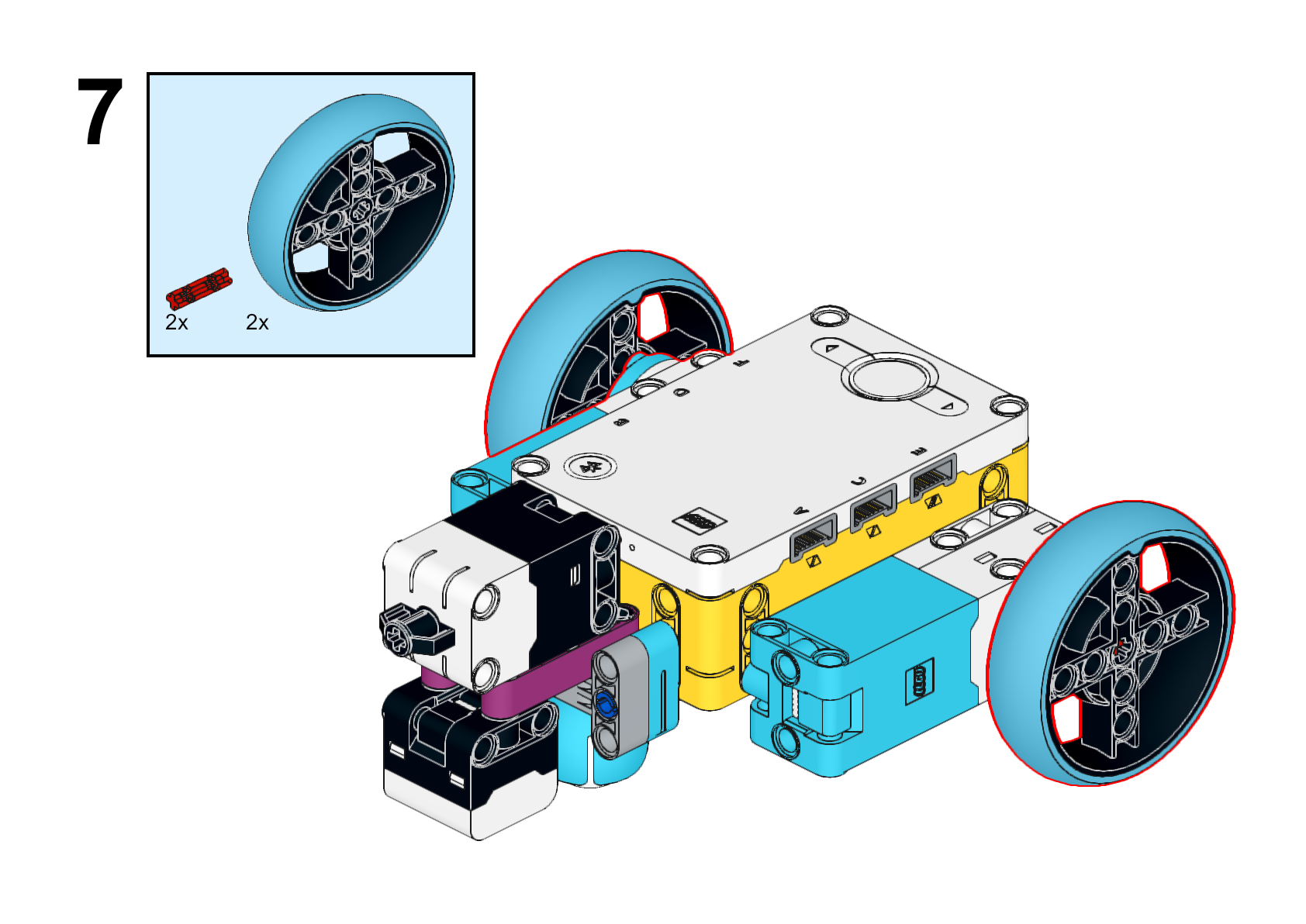
Recordeu que aquest és un repte lliure i podeu fer altres construccions. Sigueu creatius!
A continuació teniu les dues opcions per resoldre el repte, trieu la que vulgueu:
🔸 Programació del robot
Recordeu que el repte és que el vehicle que heu construït sigui capaç de seguir una línia negra situada sobre el terra i que premi un polsador quan arribi al final del recorregut. Quan premi el polsador, feu que s’engegui tota la matriu de leds i també l’indicador central de color verd, per simular el moment que el robot desactiva les trampes del laberint.
Com programar el sensor de força
El vehicle ha de seguir la línia negra, però s’ha d’aturar quan troba el polsador i el prem, així que aquesta serà la primera condició que haureu de tenir en compte a l’hora de programar.
El bloc que heu d’utilitzar per treballar amb el sensor de força és aquest:

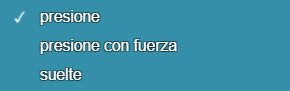
El sensor de força permet treballar amb tres estats diferents:
- Es prem (detecta el contacte encara que sigui mínim).
- Es prem amb força.
- Es deixa anar (el sensor ha d’estar premut prèviament).
També us permet mesurar directament el valor de la força que se li aplica, però aquesta és una utilitat que no ens caldrà fer servir en aquesta ocasió, ja que només volem detectar el moment que el sensor de força toca l’obstacle que representa el polsador.
Per programar aquesta part on intervé el sensor de força, podeu utilitzar, per exemple, un bloc condicional del tipus “repetir fins que”:
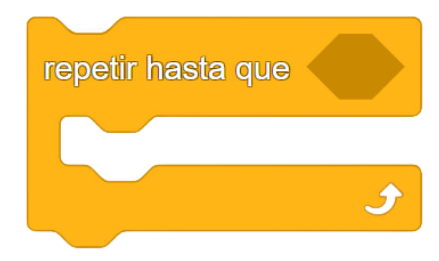
A dins del bloc hi situareu tota la programació corresponent al seguiment de línia amb el sensor de color, i la condició que situareu després de “repetir fins que” és que el sensor es premi:

Com programar el sensor de color
Haureu comprovat que el LEGO Spike Prime té un sensor de color que pot detectar 8 colors, però que també pot detectar la quantitat de llum reflectida per la superfície que té al davant. En aquest cas, utilitzareu aquesta funcionalitat. En general, fer-ho així us donarà menys problemes que intentar diferenciar directament entre color blanc i negre.
Per poder treballar correctament amb aquest bloc caldrà que feu els passos que us descrivim a continuació:
1. Un cop teniu connectat el sensor de color al hub, feu el següent:
2. Quan feu això, veureu que sota el símbol del sensor de color, apareix una xifra amb un percentatge:
Aquest percentatge és la quantitat de llum reflectida que rep el sensor.
Com que és un vehicle amb un únic sensor de color, el que fareu és programar-lo perquè vagi avançant descrivint un moviment en zig-zag. Comenceu situant el vehicle sobre la línia negra i fent que comenci un gir a la dreta. El sensor de color detectarà el canvi de reflexió quan el vehicle comenci a sortir de la zona negra i entri a la blanca i, aleshores, el programareu perquè giri cap a l’esquerra. D’aquesta manera, el vehicle tornarà cap a la línia negra i, de seguida, el fareu girar de nou cap a la dreta, i així successivament. A conseqüència d’aquests petits girs, el vehicle anirà avançant seguint la línia.
Serà molt important, doncs, establir el valor del reflex (Vref) pel qual el vehicle ha de començar a girar en la direcció contrària a la que portava. Per fer-ho, observeu com canvia el valor del reflex quan el situeu a diferents punts perpendicularment sobre la línia negra:
Amb aquestes dades, tindreu una referència per saber quin valor heu d’utilitzar en aquest bloc:
Per programar el moviment del vehicle. De totes maneres, caldrà que feu proves amb el vehicle i aneu ajustant aquest valor fins que el moviment sigui satisfactori.
⚠️ Important! Us donem un parell de consells que us ajudaran a superar el repte.
- És convenient que la línia negra sigui una mica gruixuda (com a mínim 2 cm), perquè els canvis en els valors de reflexió entre la zona negra i la blanca no es donin massa ràpid i els motors tinguin temps per actuar.
- Ajusteu correctament l’angle de gir. És possible que no us funcioni correctament perquè l’angle de gir sigui massa obert o massa tancat; si és el cas, proveu amb diversos valors.
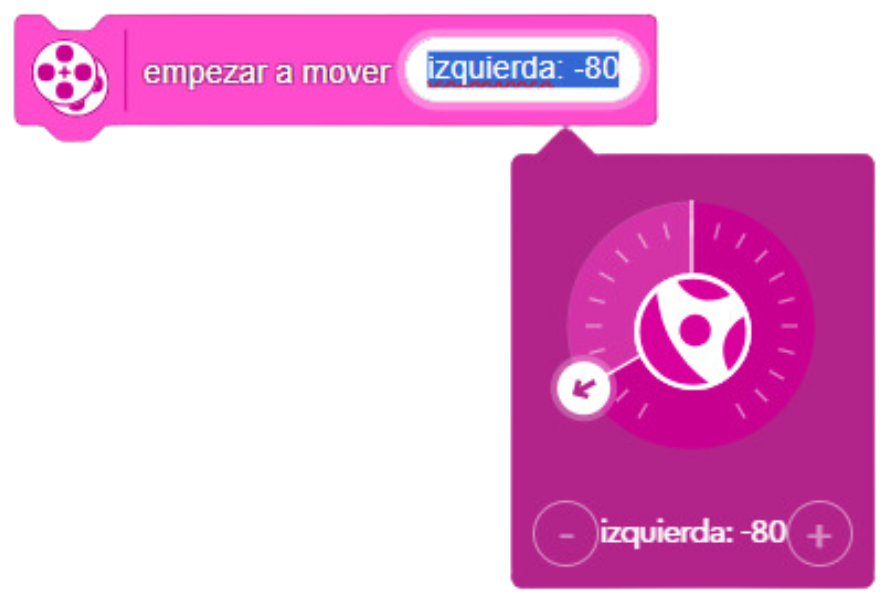
Diagrama de flux

Blocs recomanats
A continuació, us donem algunes idees sobre els blocs de Spike LEGO Education que podeu d’utilitzar:
👉🏾 Esdeveniments (per començar):
👉🏾 Control (Condicional):
👉🏾 Control (Repetir fins que):
👉🏾 Sensor de color (opció reflex):
👉🏾 Sensor de pressió:

👉🏾 Llum (matriu de leds):
👉🏾 Llum (led central):
👉🏾 Moviment (fixar motors en moviment):

👉🏾 Moviment (fer girar el vehicle):
🔸 Programació del moviment del vehicle
Amb els motors i les rodes que heu posat al vehicle, podeu fer que es mogui endavant i enrere i que faci girs.
En aquest cas, programareu el vehicle perquè pugui sortir del laberint utilitzant només els blocs de la categoria “moviment”.
Primer de tot, fixeu quins són els motors de moviment, segons on els tingueu connectats al vostre hub:

Fixeu la distància que recorrerà el vehicle per a cada rotació del motor:

Un cop teniu aquests paràmetres definits i ben ajustats, podeu començar a programar el moviment del vehicle.
Si voleu que el vehicle vagi endavant o endarrere en línia recta, utilitzeu aquest bloc:

Com que heu definit la distància que avança en cada rotació, modificant el nombre de rotacions el podreu fer avançar la distància que vulgueu.
Si voleu que el vehicle giri a dreta o esquerra, utilitzeu aquest bloc:

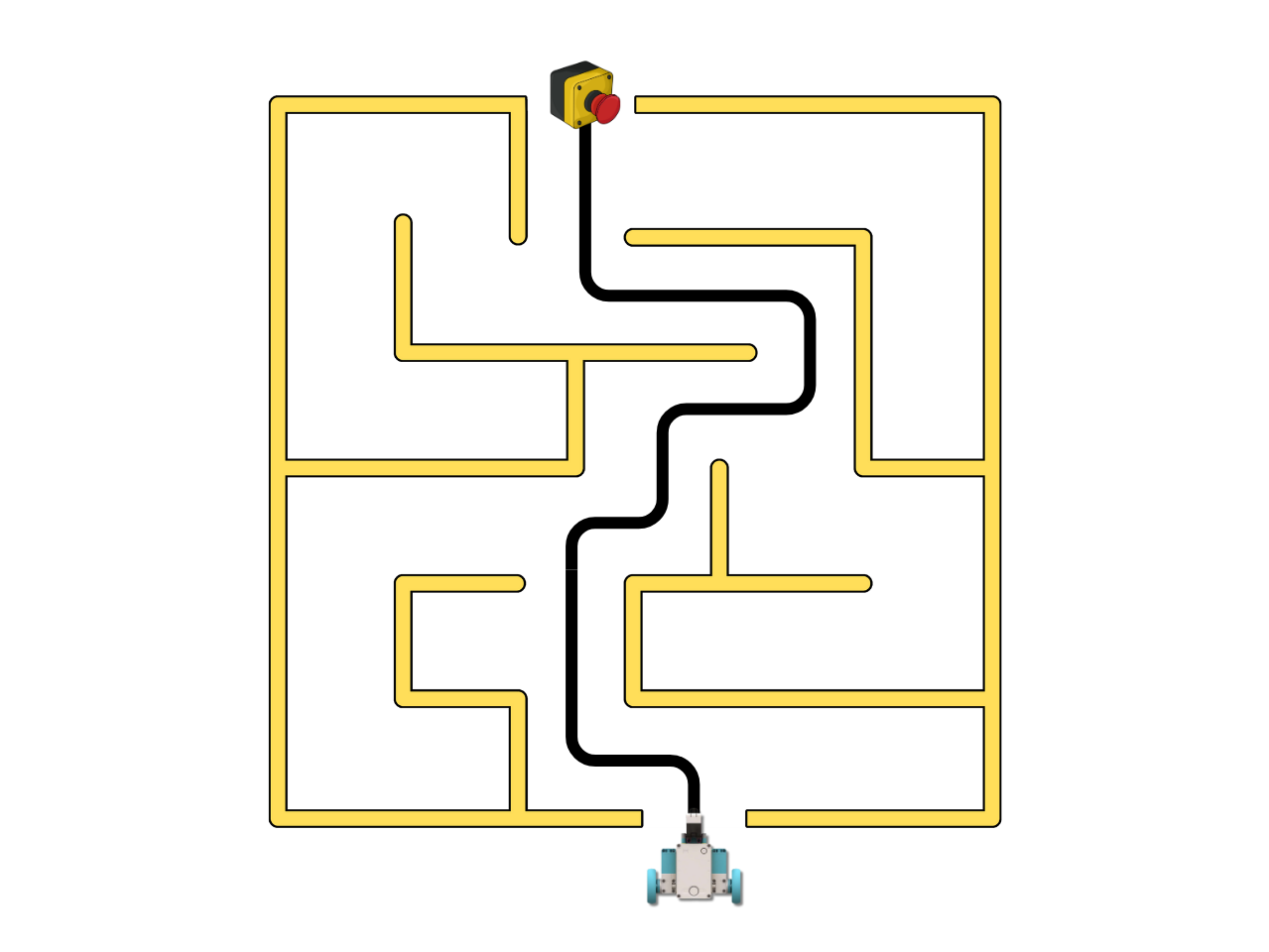
🔸 Disseny del laberint
Dissenyeu el laberint per on avançarà el vostre vehicle lliurement. Tingueu en compte que el robot té unes dimensions i que, per tant, el camí per on circula ha de tenir prou amplada perquè pugui passar-hi sense problemes i poder girar quan sigui necessari. Podeu començar amb un laberint senzill per fer proves i passar després a models més complexos. Feu volar la vostra imaginació!
🔸 Millores al programa
Podeu fer que, quan arribi al final del laberint, el vehicle premi un polsador. Trobareu tota la informació per fer-ho a l’altra opció del repte.
També podeu afegir altres accions al vehicle, com sons, efectes d’il·luminació aprofitant la matriu de leds, etc.